结合面阵成像的摆镜扫描系统设计研究
2016-02-15王智磊周世宏
袁 野,裘 俊,王智磊,周世宏
(上海卫星工程研究所,上海 201109)
结合面阵成像的摆镜扫描系统设计研究
袁 野,裘 俊,王智磊,周世宏
(上海卫星工程研究所,上海 201109)
为实现低轨卫星对地面热点区域快速、大范围的成像侦查,对面阵成像摆镜扫描系统的设计进行了研究。基于反射镜摆动扫描展宽相机视场的原理,根据卫星轨道高度、地面分辨率,确定扫描系统采用阶梯式的步进扫描,要求摆镜快速摆动快速稳定。给出了摆镜扫描系统的组成、技术指标和构型,采用TRUM-60旋转行波超声电机作为驱动电机。对设计的摆镜系统建立虚拟样机模型进行仿真,设计的摆镜模态满足系统使用要求。用ADAMS软件对摆镜系统进行动力学仿真分析,摆镜单步运动满足50 ms快速摆动、50 ms快速停止稳定成像的要求;1个运动周期内摆镜的运动状况与设计要求一致,前1 000 ms内完成10次快摆快稳的步进扫描,回程用时少于200 ms,完成1行扫描的时间充裕。设计的摆镜扫描系统能完成面阵扫描,实现宽幅成像。
摆镜; 面阵成像; 快摆; 快稳; 阶梯式步进扫描; 超声电机; 单步运动; 运动周期
0 引言
目前航天侦察主要通过低轨卫星实现。虽然卫星有广阔的视野,但由于种种技术原因,对地较高分辨率侦察还是“烟囱”式的,卫星对全球态势感知的效能未充分发挥。逐渐成熟的面阵成像技术可在一次曝光时间内对一片区域以较高分辨率成像,大幅提高对地遥感侦察效率。该技术与摆镜扫描机构结合,将沿卫星轨迹垂直方向进行点扫描成像提升为面推扫成像,并与反射镜横向摆扫结合获取二维较高分辨率的宽幅图像。这种卫星载荷可较好地满足在地面突发情况下的遥感需求,利用此遥感卫星可对热点区域进行快速大面积的详细侦察[1-4]。
目前国内外遥感成像侦察卫星发展已较成熟,从点阵到线阵再到面阵成像,都在尝试通过多种方式实现高分辨率和宽视场,获得更好的侦察性能。对光学扫描机构也进行了大量研究,但主要是结合线阵成像的探测器使用。现阶段国内外扫描型相机的研制虽然在轻质量扫描镜的设计与加工、扫描机构指向精度控制,以及运动速度控制技术等方面取得了很大进展,但相关报道较少。根据公开资料发现目前卫星面阵扫描展宽成像研究还处在起步阶段,尚无成功案例[5]。面阵成像技术对扫描系统的要求不同,不再是连续的线性扫描,面阵照片的幅宽决定了阶梯式的步进扫描,满足两次成像间光轴扫过单张照片幅宽,又提供了相机稳定成像的环境。基于面阵成像阶梯式步进扫描,对摆镜的摆动响应时间及摆动后稳定度的要求也较高。本文对轨道高度600 km的太阳同步轨道卫星的应用面阵扫描技术进行了研究,在不提高星载相机配置、不增加卫星敏捷机动能力的前提下,增加对地面侦查的范围,提出用阶梯式步进快摆快稳的扫描方式,在卫星飞行轨迹的垂直方向扫描,增加成像宽度从而扩大侦查范围。针对快摆快稳的摆镜扫描方式,采用超声电机进行直接驱动,设计了一种新型摆镜扫描系统。
1 面阵成像扫描方案
应用于低轨卫星的面阵扫描成像技术,利用卫星自身飞行的前向推扫,结合摆镜对卫星轨迹垂直方向的扫描,获取地面的二维图像[6]。结合面阵成像的摆镜扫描系统是在星载面阵相机前安装一个可摆动的反射镜,使相机的视场随反射镜摆动而摆动,完成多次成像,拼接后形成一张宽幅图像,由此完成了对星下点区域的宽视场遥感侦查。反射镜摆动扫描展宽相机视场的原理如图1所示。
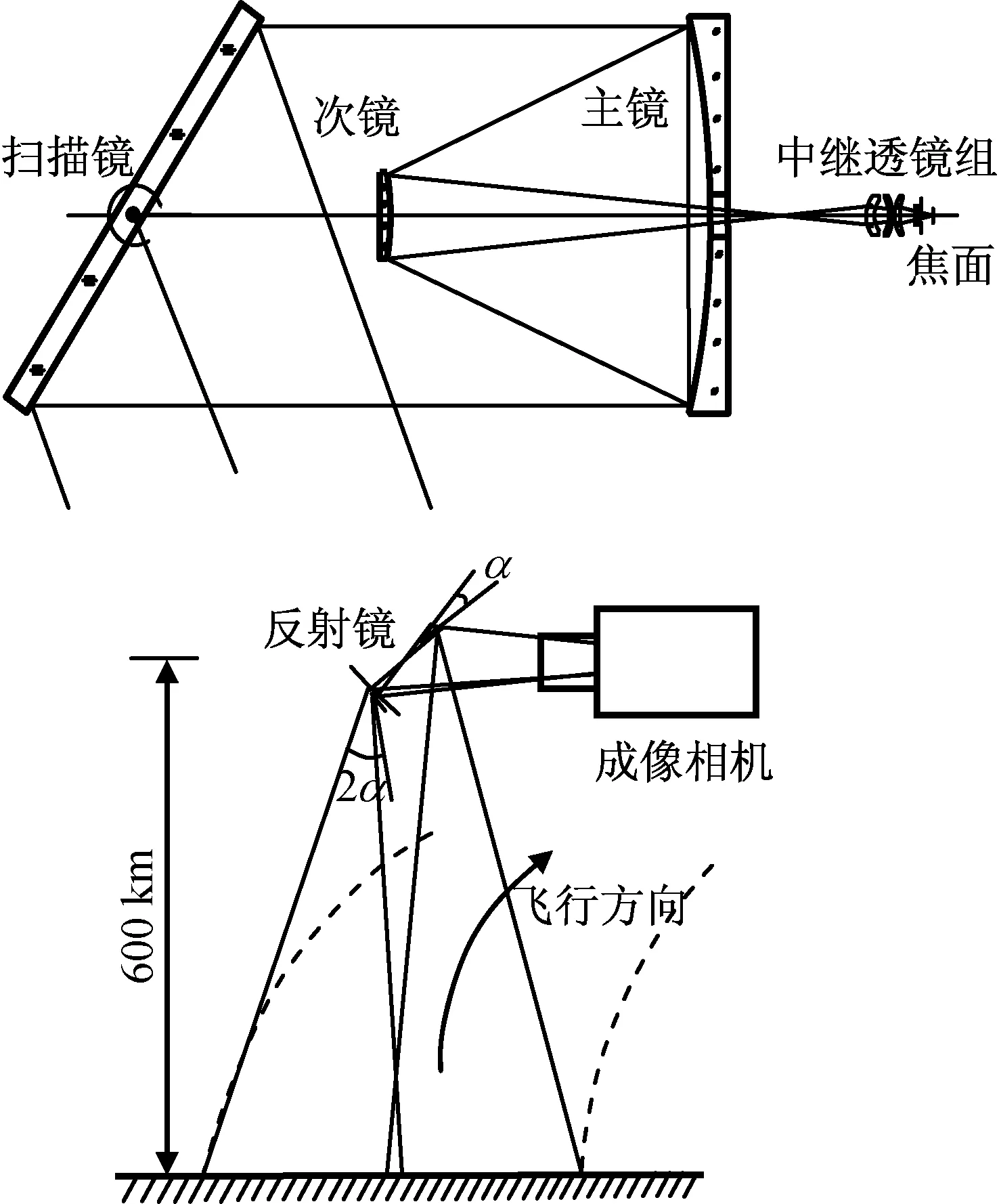
图1 摆镜扫描原理Fig.1 Principle of scanning mirror
针对轨道高度(H)600 km的太阳同步轨道,地面分辨率(p)要求2 m,光学系统口径(D)250 mm,卫星在轨飞行速度7.546 km/s。相机传感器类型初选为JAI公司的SP20000M(全色)COMS,有效像素5 120 pixel×3 840 pixel,像元尺寸(d)6.4 μm,感光面尺寸32.7 mm×24.5 mm,通过3块传感器的拼接可实现单景照片20 km×10 km,光学系统视场角±1.13°,最高帧频30 f/s,光学系统焦距(f)1 920 mm。
根据以上参数可得卫星飞过单幅照片区域需用时1 325 ms,如图2所示。摆镜扫描系统需充分利用这段时间,通过摆镜摆动,将相机光轴在飞行轨迹垂直方向摆过一定角度,在保证两次成像有一定重叠的前提下,尽量扩大扫描成像的范围。面阵成像的单幅照片有一定宽度,因此扫描系统的运动方式不是连续的线性扫描,而是阶梯式的步进扫描;摆镜的单步扫描时间可分为摆动、稳定和成像三部分,摆镜50 ms摆动1°并停止,利用35 ms时间稳定,使相机有一个静止稳定的成像环境,然后面阵相机成像用时15 ms,一次摆动成像总用时100 ms,在一幅照片的过顶时间内摆镜系统在轨迹垂直方向摆动10次,完成11张照片,总用时1 015 ms,剩余时间用于摆镜迅速回位,准备开始下一周期的扫描,通过扫描系统将成像幅宽增加至220 km。

图2 扫描成像和摆镜运动
2 摆镜扫描系统设计
摆镜扫描系统由平面反射镜、摆镜传动轴、摆镜支架、驱动电机、电机驱动控制器(含软件)组成,摆镜扫描系统技术指标要求如下:摆镜布局方式,与光轴成45°角的平面镜;摆镜摆动范围,一维摆动40°~50°,单向扫描;摆动速度,50 ms摆动1°,稳定50 ms。
扫描反射镜是摆镜扫描系统的关键部件。根据光学系统要求,本文的摆镜镜体为长半轴410 mm、短半轴270 mm、厚40 mm的椭圆形镜体。设计扫描反射镜时需考虑地面和空间环境中反射镜的外形、镜体厚度、镜面厚度,以及材料本身密度、传热系数、弹性模量等属性对反射镜镜面质量的影响[7]。针对文中的扫描系统,要求摆镜快速摆动快速稳定。根据
Mq=Jx·α+Mf.
式中:Mq为驱动力矩;α为摆镜角加速度;Mf为阻力矩;Jx为椭圆形镜体的转动惯量,且Jx=(m/4)·a2。此处:a为椭圆的长半轴,已由系统参数要求确定;m为质量。必须要求摆镜的质量轻、转动惯量小,驱动电机的输出力矩大,才能获得较大的角加速度,实现快速起动。因此,摆镜采用背部开减轻孔设计,在镜体两端利用矩形孔减重,并对厚度进行削减,以减小转动惯量;为实现快速响应,镜体采用两侧支撑的方式,将传动轴与镜体固连,传动轴与电机连接实现直接驱动。摆镜在稳定位置处的振动方程为

式中:θ为角位移;c为阻尼;k为刚度。有阻尼自由振动的解为

摆镜系统在稳定位置处的系统阻尼主要由镜体材料决定。为使摆镜能快速稳定,需摆镜身有较大的刚度,在中心传力部分采用三角形孔设计,增强局部的扭转刚度[8]。为实现扫描系统的快摆快稳,需要驱动电机的起动、停止的响应时间短,额定输出力矩大。传统电磁式电机存在电磁滞后,响应时间长,且输出力矩不足,无法满足要求;超声电机的运动部件惯量小,起动速度快,断电响应时间短,位置和速度控制性好,转矩密度大,可实现低速大转矩的直接驱动,适于本文摆镜扫描系统[9]。选取TRUM-60型旋转行波超声电机作为驱动电机,电机额定力矩0.6 N·m,自锁力矩大于1 N·m,起动响应时间小于3 ms,停止响应时间小于1 ms,质量小于300 g。摆镜扫描系统构型如图3所示。
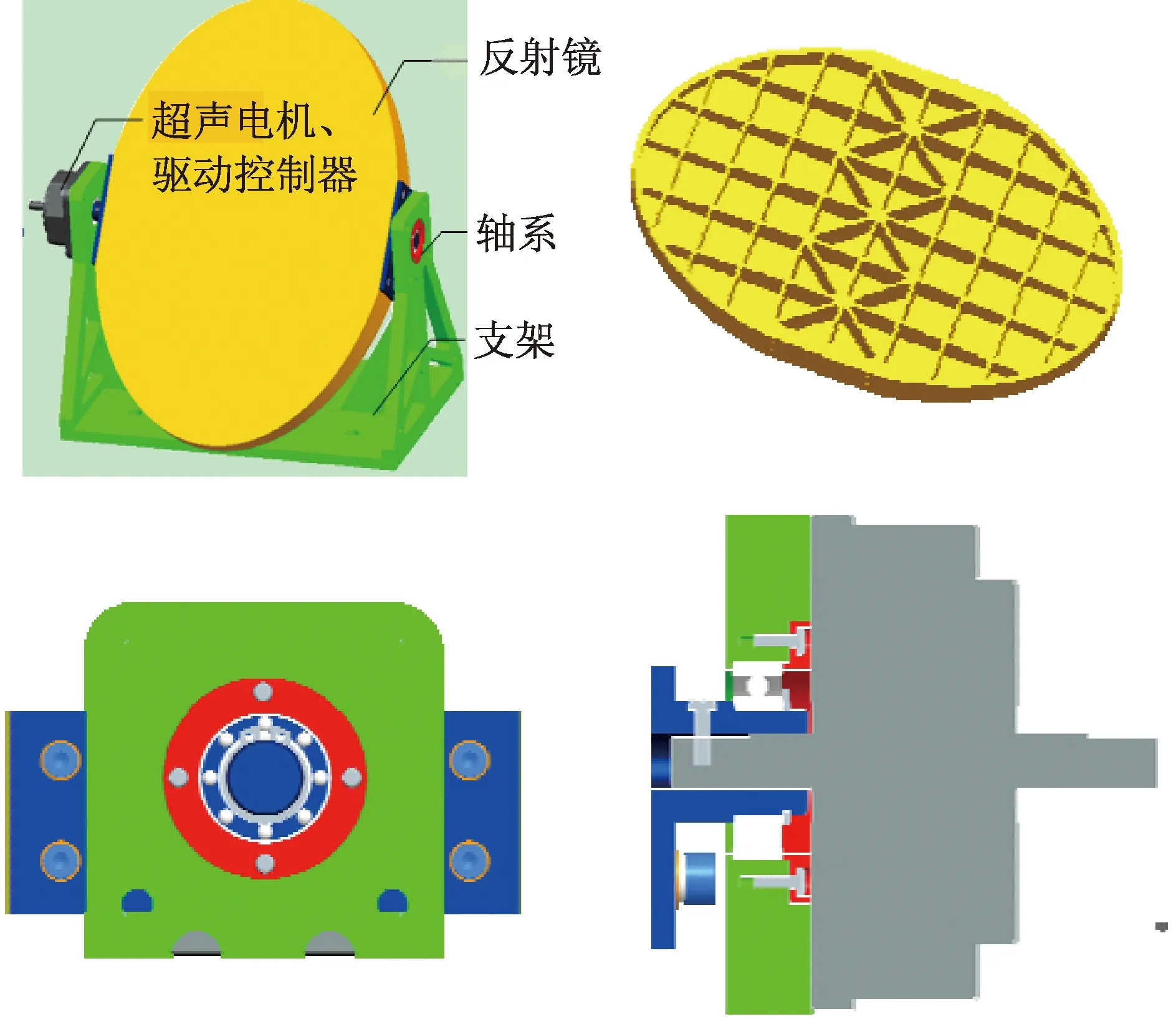
图3 摆镜扫描系统构型Fig.3 Structure of scanning mirror system
3 仿真分析
3.1 系统模态
在摆镜扫描系统设计的基础上,建立虚拟样机模型,对摆镜组件进行了仿真分析。先对镜体和整个组件进行有限元分析。在PATRAN软件中导入镜体的PROE模型,进行网格划分,通过模态分析计算镜体各阶固有频率、振型,以及在两端支撑和重力作用下的变形,摆镜组件整体的固有频率,结果如图4~6所示。其中:摆镜在重力作用下变形0.572 μm。由仿真结果可知:设计的摆镜满足系统使用要求。
3.2 摆镜运动学
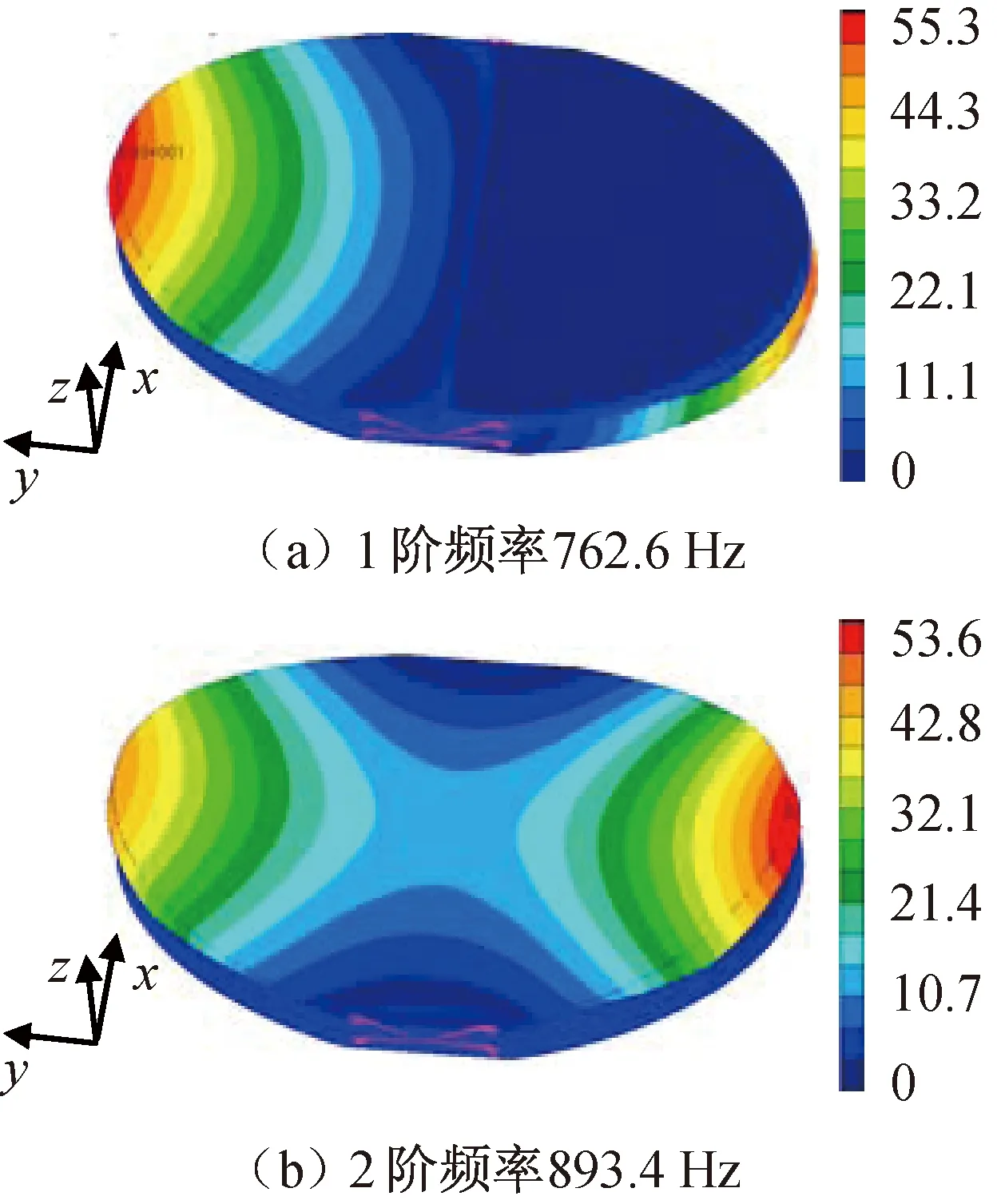
图4 镜体固有频率和振型Fig.4 Nature modes of mirror
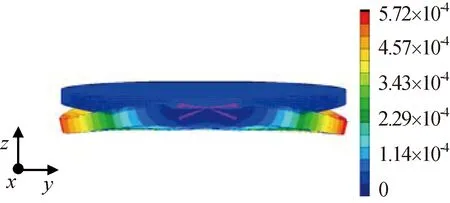
图5 镜体重力作用下变形Fig.5 Mirror deformation under gravity
ADAMS柔性模块采用模态表示物体弹性,它是基于物体的弹性变形时相对连接物体坐标系的弹性小变形,同时物体坐标系又是经历大的非线性整体移动和转动假设建立的。其方法是赋予柔性体一个模态集,采用模态展开法,用模态向量和模态坐标的线性组合表示弹性位移,通过计算每一时刻物体的弹性位移描述其变形运动[10]。
ADAMS柔性模块中的柔性体是用离散化的若
干个单元的有限个结点自由度表示物体的无限多个自由度。这些单元结点的弹性变形可近似地用少量模态的线性组合表示。若物体坐标系的位置用它在惯性坐标系中的笛卡尔坐标X=[xyz]和反映刚体方位的欧拉角Ψ=[φθφ]表示,模态坐标q=[q1q2…qM]T(此处M为模态坐标数),则柔性体的广义坐标可表示为
ξ=[XΨq]T=[xyzφθφqj]T,
则柔性体上任一结点位置向量为
ri=X+A(Si+Ψiq).
式中:A为物体坐标系至惯性坐标系的转换阵;Si为结点i在物体坐标系中未变形时的位置。求导可得该结点的移动速度

为验证在电机驱动下摆镜能否达到设计要求的运动状态,用ADAMS软件对摆镜机构进行动力学仿真分析。将扫描机构的PROE模型转成X_T文件,导入ADAMS-View中,将系统的关键部件摆镜镜体通过有限元仿真软件处理,生成MNF文件,在ADAMS中用柔性体替换摆镜镜体部分,形成摆镜系统的刚柔耦合模型;建立各零件间约束和运动副,作为动力学仿真的计算模型,如图7所示。
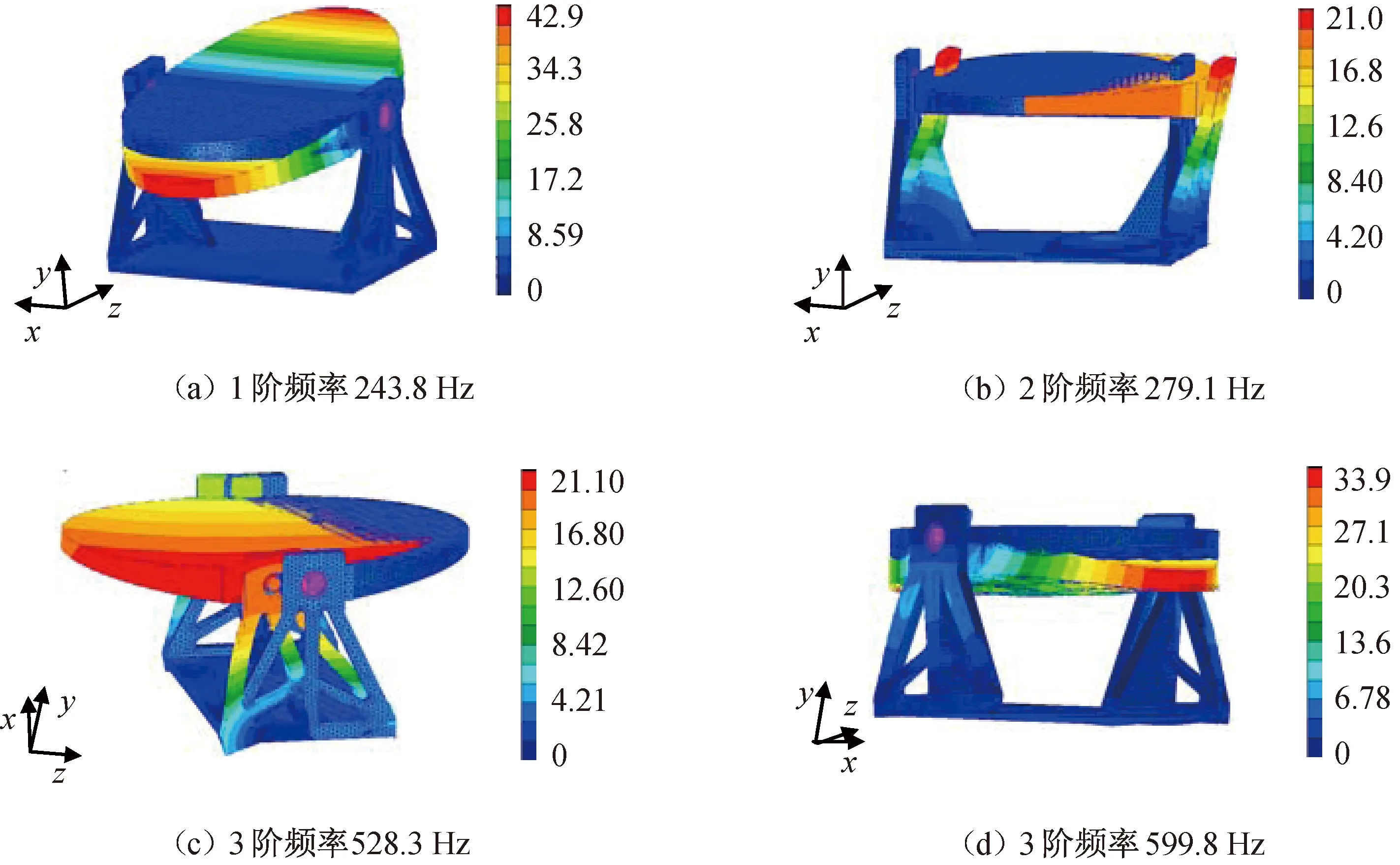
图6 摆镜组件固有频率和振型Fig.6 Nature modes of assembly
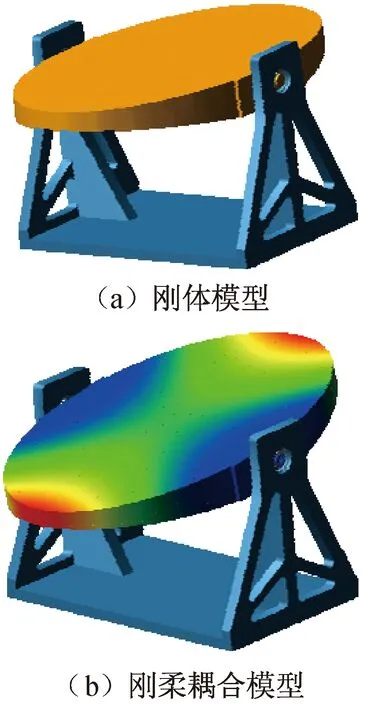
图7 ADAMS中刚体与刚柔耦合模型Fig.7 Calculation models in ADAMS
先仿真摆镜100 ms的单步运动过程。施加扭矩模拟超声电机提供的转矩,驱动摆镜实现运动;对超声电机的断电自锁,在转轴间施加一径向力模拟断电后自锁的大摩擦力矩,实现摆镜的快速停止并稳定。仿真所得摆镜的摆动角度、速度和加速度分别如图8~10所示。由图可知:摆镜在50 ms时达到了设计要求的摆动角度,并停止运动,开始衰减稳定,角度稳定于0.984°;摆镜的角加速度在80 ms后衰减到0.01 (°)/s2量级以下,满足50 ms快速摆动、50 ms内快速停止稳定成像的设计要求。
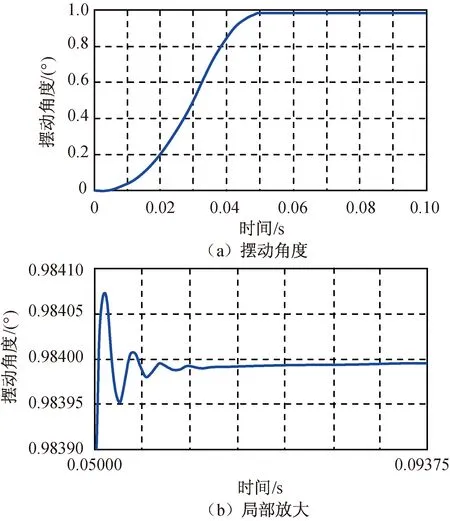
图8 摆镜单步运动角度Fig.8 Scanning angle of mirror with one step
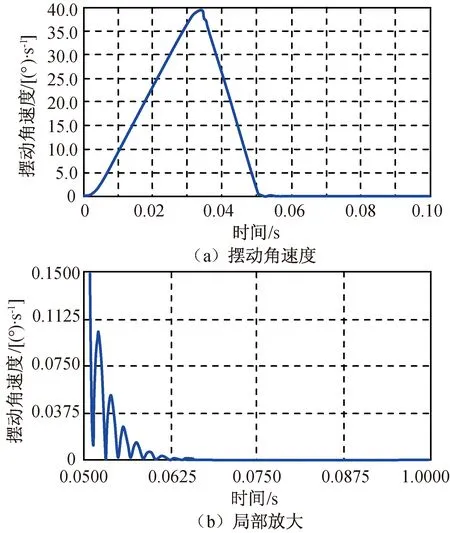
图9 摆镜单步运动角速度Fig.9 Scanning angular velocity of mirror with one step

图10 摆镜单步运动角加速度Fig.10 Scanning angular acceleration of mirror with one step
在此基础上,根据扫描方案设计的摆动时序,对1个周期内的运动进行仿真。电机采用开环控制策略,通过控制电机加、断电时间,实现摆镜在要求的时间内快速摆动、快速停止稳定。仿真所得摆镜的摆动角、角速度和角加速度分别如图11~13所示。由图11~13可知:摆镜的运动状况与设计要求的一致,在前1 000 ms内完成10次快摆快稳的步进扫描,然后迅速回到初始位置,回程用时小于200 ms,完成1行扫描的时间充裕,能完成面阵成像扫描的功能,实现宽幅成像。

图11 1个运动周期内摆镜角度Fig.11 Scanning angle of mirror in one cycle
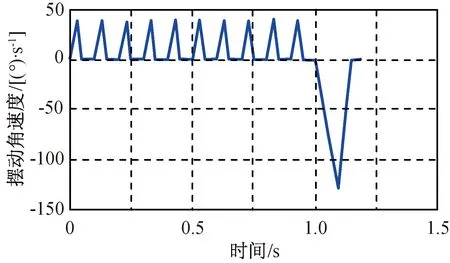
图12 1个运动周期内摆镜角速度Fig.12 Scanning angular velocity of mirror in one cycle

图13 1个运动周期内摆镜角加速度Fig.13 Scanning angular acceleration of mirror in one cycle
4 结束语
本文对高度600 km的太阳同步轨道卫星应用面阵扫描成像技术进行了研究。根据低轨卫星特点设计了一种快摆快稳的摆镜扫描系统,给出了总体方案、摆镜扫描系统设计并进行了仿真。仿真验证在超声电机的驱动作用下,设计的摆镜能实现50 ms快摆,50 ms快稳成像的运动。设计的摆镜扫描系统对空间面阵成像技术的应用有一定的参考意义。本文对低轨面阵扫描的应用进行了探索,通过研究分析发现,面阵扫描的成像体制能大幅提高扫描效率,提升遥感卫星侦查的能力,也可为未来卫星应用拓展提供技术储备。后续将进行原理样机加工,用实验测试摆镜扫描系统能否达到设计要求。
目前原理样机已完成加工、装配,进入扫描机构的调试阶段,将用于验证这种用于低轨面阵成像的摆镜扫描系统的可行性。
[1] 袁修孝, 曹金山. 高分辨率卫星遥感精确对地目标定位理论与方法[M]. 北京: 科学出版社, 2012.
[2] 张过, 秦绪文, 潘红播, 等. 高分辨率光学卫星标准产品分级体系研究[M]. 北京: 测绘出版社, 2013.
[3] 芮涛. 大口径长焦距扫描成像光学系统像质研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[4] 吴技. 国外航天侦察系统的现状与发展[J]. 电讯技术, 2009, 49(5): 108-114.
[5] 汪逸群, 齐心达. 国外空间光学扫描机构现状[J]. 光机电信息, 2010, 27(12): 15-20.
[6] 袁立, 杨磊. 卫星相机低速大惯量高精度扫描机构技术研究[C]// 全国十二届空间及运动体控制技术学术年会. 北京: 中国自动化学会空间及运动体控制专业委员会, 2006: 544-548.
[7] SCHWALM M, DIBIASE D, LANDRY D. Silicon carbide pointing mirror and telescope for the geostationary imaging Fourier transform spectrometer (GIFTS)[J]. SPIE, 2005, 5868(3): 1-8.
[8] 方丹. 步进电机对空间大惯量反射镜驱动性能的研究[C]// 第十四届全国遥感技术学术交流会. 青岛: 海洋环境科学与数值模拟国家海洋局重点实验室, 中国海洋学会海洋遥感专业委员会, 中国遥感委员会, 等, 2003: 79-84.
[9] 王景山. 超声电机微步控制及其应用[D]. 南京: 南京航空航天大学, 2012.
[10] 孟明明, 汤文成, 周徐斌, 等. 基于ANSYS和ADAMS的刚柔耦合卫星太阳电池阵的建模研究[J]. 机械制造与自动化, 2010, 39(1): 138-140.
Study on Design of Scanning Mirror System for Area Array Imaging
YUAN Ye, QIU Jun, WANG Zhi-lei, ZHOU Shi-hong
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
To realize fast and wide range imaging detection of hot spots on the ground with low earth orbit (LEO) satellite, the design of scanning mirror system for area array imaging was studied. Based on the principle of scanning mirror for expanding the camera field, stepped scan was used in the scanning system according to the orbit altitude and ground resolution, in which the scanning mirror would be fast swinging and fast steady. The composition, specification and structure of the scanning mirror system designed were given. The TRUM-60 traveling wave-type rotary ultrasonic motor was used as driving motor. Virtual prototype of the designed mirror system was modeled and simulation was carried. The modal of the designed mirror meets the system requirement. The dynamics of the scanning mirror system was analyzed by simulation with ADAMS software. The one step motion of the mirror meets the requirements which are fast swinging in 50 ms and fast steady and imaging in 50 ms. The mirror motion in one cycle is consistent with the design requirement. It can implement 10 times step scanning with fast swinging and fast steady in the first 1 000 ms and return time was less than 200 ms. There is plenty time to finish one line scanning. The scanning mirror system designed can realize area array imaging and wide swath imaging.
Swinging mirror; Area array imaging; Fast swinging; Fast steady; Stepped scanning; Ultrasonic motor; Step motion; Motion cycle
1006-1630(2016)06-0072-06
2016-03-08;
2016-05-13
袁 野(1990—),男,硕士,主要从事卫星总体设计与仿真技术研究。
V447.1
A
10.19328/j.cnki.1006-1630.2016.06.010
