二值特征匹配跟踪算法的快速性和鲁棒性比较
2016-02-07刘亚伟李小民
刘亚伟,李小民
(军械工程学院 无人机工程系,河北 石家庄 050003)
二值特征匹配跟踪算法的快速性和鲁棒性比较
刘亚伟,李小民
(军械工程学院 无人机工程系,河北 石家庄 050003)
针对目标跟踪实时性和鲁棒性问题,提出了基于二值特征匹配的目标跟踪算法。将二值特征匹配算法应用于目标跟踪过程中,对特征匹配算法的实时性进行比较,并在目标被遮挡的情况下对算法的鲁棒性进行测试。实验结果表明,基于二值特征匹配的目标跟踪算法比SIFT(Scale Invariant Feature Transform)和SURF(Speeded Up Robust Feature)快将近3~4倍,而BRISK(Binary Robust Invariant Scalable Keypoint)对目标遮挡问题的鲁棒性最好。
二值特征;遮挡;快速性;鲁棒性
0 引言
随着计算机视觉领域的快速发展,目标跟踪技术受到了各领域的重视并广泛应用于视觉监控、医学和航空等领域。目前常用的目标跟踪算法有MeanShift跟踪算法[1]、Kalman滤波跟踪算法[2]和基于特征点匹配的跟踪算法[3]等。基于特征点匹配的目标跟踪算法由于其独特的性能,受到了广泛的关注。基于特征匹配的目标跟踪算法(例如SIFT、SURF、ORB(Oriented FAST and Rotated BRIEF)[4]、BRISK[5]和FREAK(Fast Retina Keypoint)[6]等)具有对尺度缩放和旋转的不变性,对视角、光照和遮挡具有良好的稳定性。文献[3]将SIFT算法应用到了运动目标的检测和跟踪中;文献[7]将SURF算法应用到了目标跟踪过程中。但是由于SIFT和SURF算法分别采用64维特征向量和32维特征向量进行特征描述,计算复杂,所以导致在跟踪过程中实时性较差[8-9]。而ORB、BRISK和FREAK等基于二值特征的目标匹配算法,由于其采用二进制字符串进行特征描述并使用汉明距离进行特征匹配,使得其运算速度和运算过程中内存占有量都有了明显改善[10-11]。
本文将二进制特征匹配算法应用于目标跟踪过程中,分别对ORB[4]、BRISK[5]和FREAK[6]等目标跟踪算法性能进行测试和对比,并与SIFT和SURF等非二进制特征匹配跟踪算法进行对比,实验结果表明,基于二值特征描述的特征匹配跟踪算法在保证鲁棒性的前提下,具有较好的实时性。
1 二值特征匹配算法
二值特征描述是指将图像中的特征点用二进制字符串(0和1)进行描述的特征描述方法。采用二进制字符串进行特征描述的描述符需要用汉明距离进行特征匹配。
1.1 ORB算法
ORB特征匹配算法采用改进的FAST算子作为特征检测算法,并通过多层图像金字塔来获得尺度信息。ORB算法采用亮度中心来计算特征点的主方向,并在此基础上采用BRIEF对每个特征点建立由(0,1)组成的二进制字符串组成的n维二进制描述符,n一般情况下取值256,因此每个特征点会得到一个256 bit的描述符。对于二进制描述符的相似性判别,可以用汉明距离来表示(特征匹配)。汉明距离是指将一个字符串转化成另一个字符串所需要替换的字符个数,其计算采用按位“异或”来实现。
1.2 BRISK算法
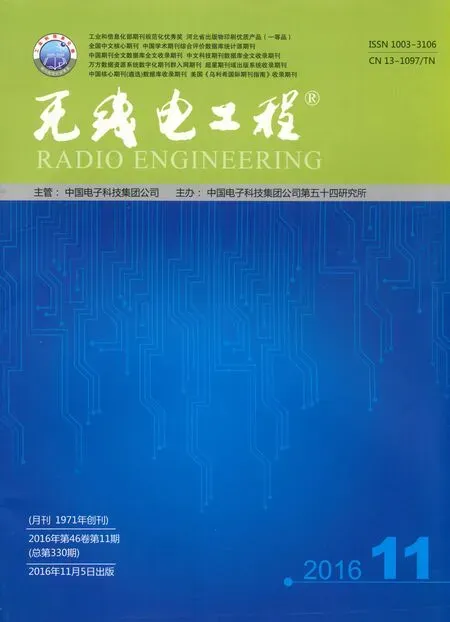
BRISK算法采用基于特征点为中心的40×40像素块构建同心圆方法的自定义邻域采样模式,如图1所示。
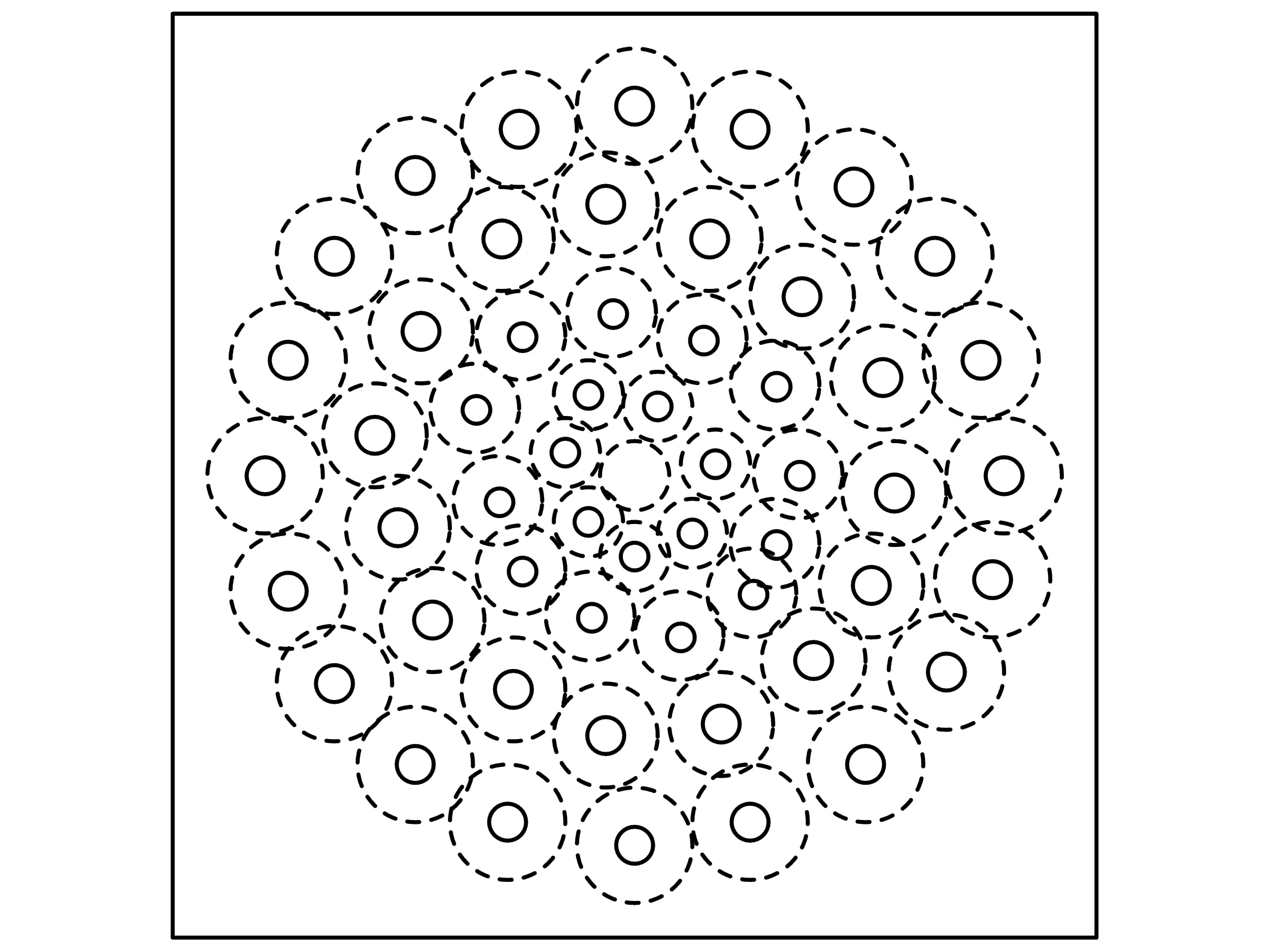
图1 BRISK邻域采样模式
采用长距离采样点对集和短距离采样点对集的形式计算角点的特征方向,最终形成512 bit的二值化特征描述。BRISK算法同样采用汉明距离进行特征匹配。
1.3 FREAK算法
FREAK算法是基于人类视网膜而提出的一种特征检测和描述算法,FREAK描述符的采样点分布如图2所示。
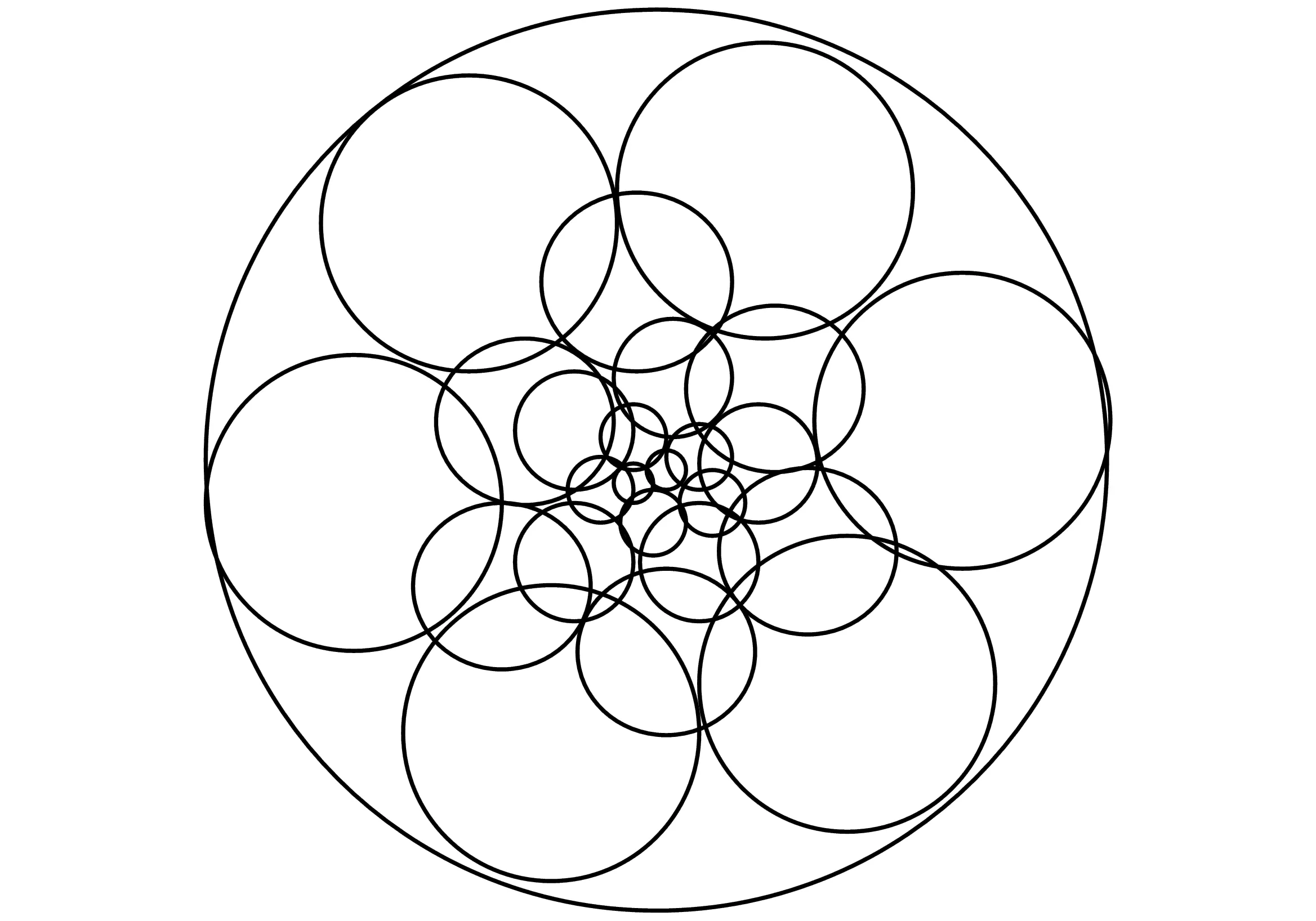
图2 FREAK算子的采样点结构
特征点分布在以特征点为中心的同心圆上,离中心特征点越近,采样点越密集,离中心特征点越远,采样点越稀疏。FREAK生成的二进制字符串由采样点对的强度比较结果级联而成。最终通过汉明距离进行特征匹配。
2 基于特征匹配的目标跟踪算法性能测试
特征点匹配算法在目标跟踪[12-13]过程中的实现过程为:读取视频的一帧图像与模板进行匹配,通过RANSAC进行特征点筛选剔除错误匹配点,根据正确匹配点画出目标区域方框,这样循环进行读取视频帧并进行匹配就实现了目标的跟踪。具体流程如图3所示。
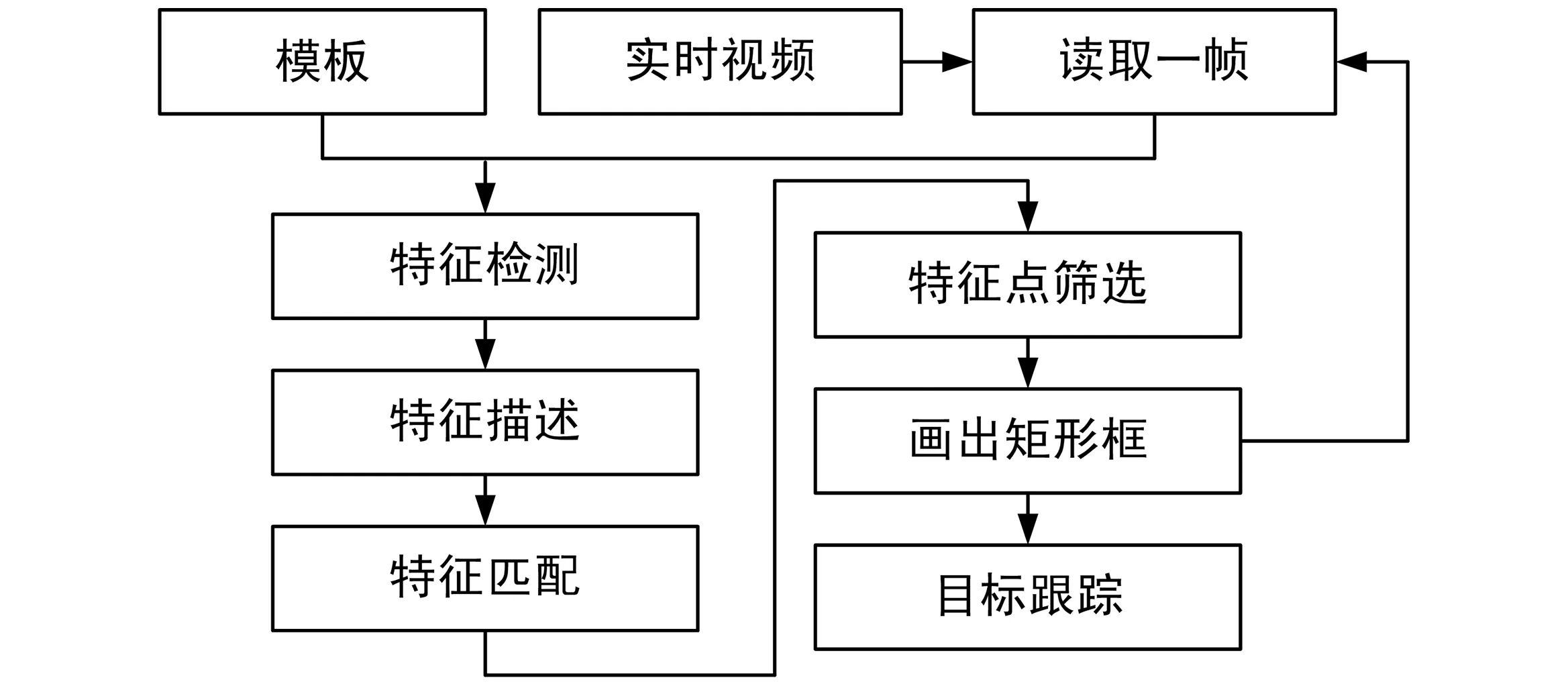
图3 特征匹配目标跟踪流程
由此可以看出,在基于特征点匹配的目标跟踪中,对特征检测子、描述子和匹配算法的性能要求非常高,尤其是在快速性方面要求更加严格。
2.1 基于二进制特征匹配的目标跟踪算法快速性测试
本文将SIFT、SURF算法和ORB、BRISK、FREAK等二进制特征匹配算法应用于HERO运动相机拍摄的目标跟踪视频过程中。视频帧频率为25帧/s,分辨率为“1 920×1 080”。 实验是在VS2010开发平台上,利用VC++语言和开源代码OpenCV联合编程实现。其中硬件系统:处理器为Inter(R)Core(TM) i3 CPU M390@2.67GHz,内存为4.00GB,硬盘为500G,操作系统为Windows 7。实验对跟踪视频中的前20帧的检测、匹配时间进行测试,并取其平均值,具体测试结果如表1所示。

表1 特征匹配算法快速性测试表
测试结果表明,ORB、BRISK和FREAK等二进制特征匹配算法普遍比SIFT快近6倍,比SURF算法快近3倍。而ORB算法与BRISK和FREAK算法相比速度较快。
2.2 基于二进制特征匹配的目标跟踪算法对遮挡情况的鲁棒性测试
本文采用上述拍摄的视频,通过测试目标在经过遮挡带时的跟踪效果,来测试算法对目标被遮挡情况下的跟踪鲁棒性。
2.2.1 ORB算法
基于ORB特征匹配算法的目标跟踪效果如图4所示。

图4 ORB特征匹配目标跟踪
图4中,第69帧为目标正常情况下的跟踪效果图;第193帧为目标头部进入遮挡区域时的跟踪效果图,跟踪正常;第207帧为目标进入一半时的目标跟踪效果图,跟踪仍然正常;目标运动到第209帧时,开始出现了错误匹配点;到213帧时,跟踪框发生了变化;第223帧为目标被全部遮挡情况下的跟踪效果图;第228帧时跟踪框恢复正常;第234帧时特征匹配点恢复正常。
2.2.2 BRISK算法
基于BRISK特征匹配算法的目标跟踪效果如图5所示。

图5 BRISK特征匹配目标跟踪
图5中,第69帧为目标正常情况下的跟踪效果图;第193帧为目标头部进入遮挡区域时的跟踪效果图,跟踪正常;第207帧为目标进入一半时的目标跟踪效果图,跟踪仍然正常;当目标运动到第215帧时,开始出现错误匹配点;第217帧时跟踪框发生明显变化;第223帧为目标全部被遮挡情况下的跟踪效果图;第228帧时跟踪框恢复正常;第230帧时特征匹配点恢复正常。
2.2.3 FREAK算法
基于FREAK特征匹配算法的目标跟踪效果如图6所示。
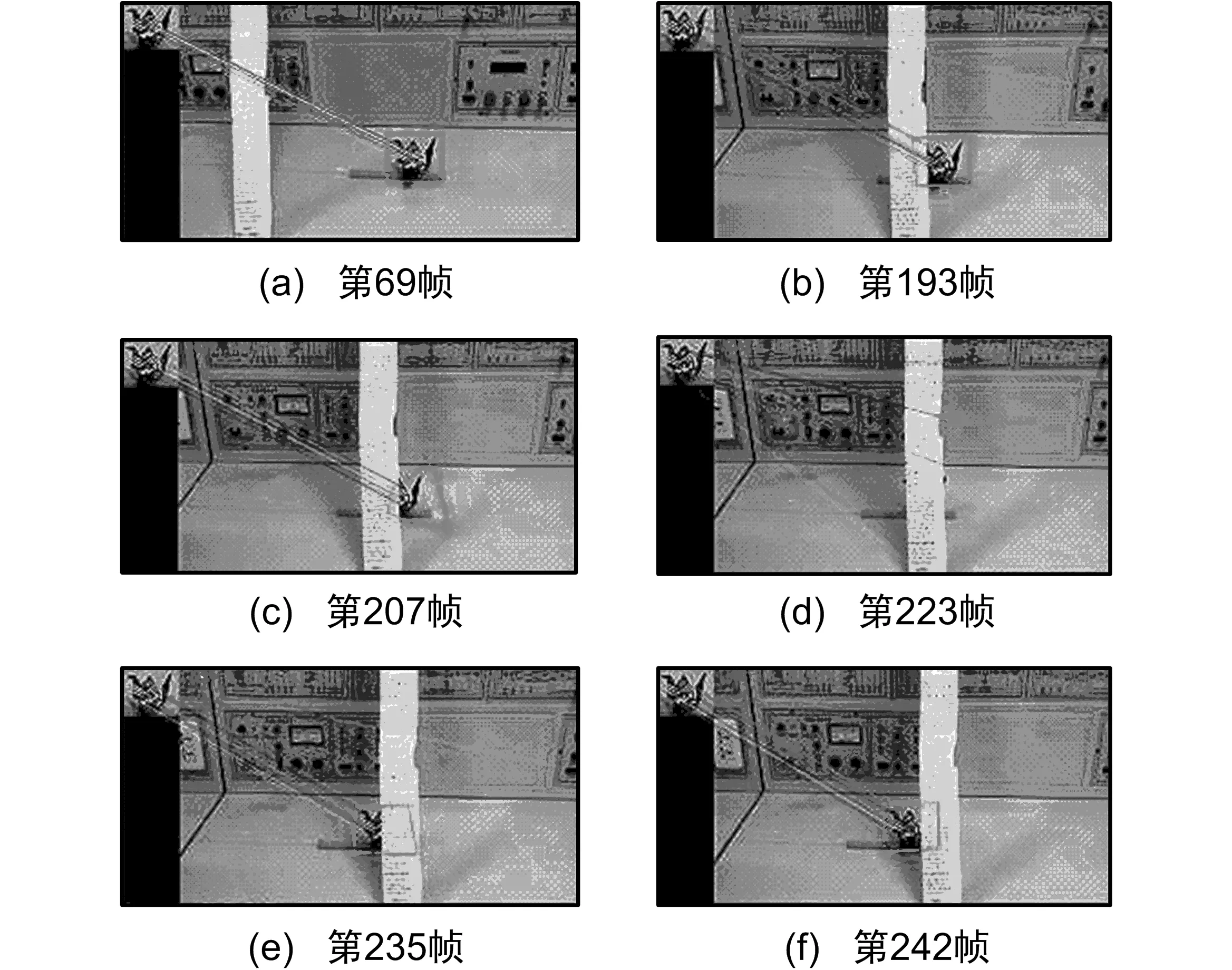
图6 FREAK特征匹配目标跟踪
图6中,第69帧为目标正常情况下的跟踪效果图;第193帧为目标头部进入遮挡区域时的跟踪效果图,这是开始出现了错误匹配点;第207帧为目标进入一半时的目标跟踪效果图,跟踪窗口开始出现明显变化;第223帧为目标被全部遮挡情况下的跟踪效果图;第235帧时跟踪框恢复正常;第242帧时特征匹配点恢复正常。
基于二值特征匹配的目标跟踪算法对遮挡的鲁棒性能测试结果如表2所示。
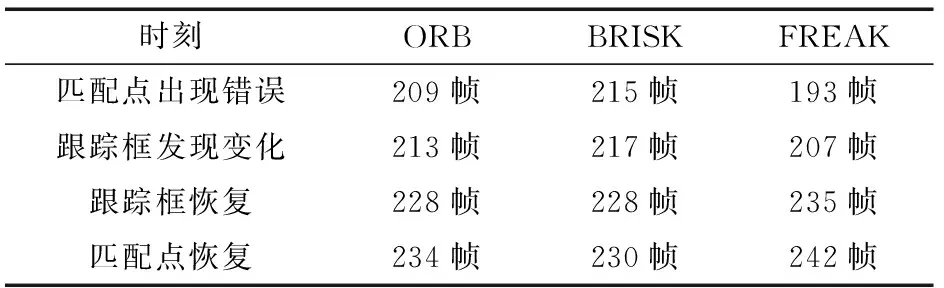
表2 性能测试结果
由表2可知,跟踪过程中错误匹配点出现的前后顺序为FREAK、ORB、BRISK;跟踪框出现错误的顺序为FREAK、ORB、BRISK;跟踪框恢复的顺序为ORB、BRISK、FREAK;匹配点恢复的顺序为BRISK、ORB、FREAK。综上所述,BRISK对目标被遮挡跟踪的鲁棒性最强,其次是ORB和FREAK。
3 结束语
二进制特征匹配算法作为视频跟踪领域一个新方法,其速度明显快于传统的SIFT和SURF算法,具有较好的实时性。在对目标被遮挡的鲁棒性方面,仍然保持着较高的鲁棒性。实验结果表明,BRISK算法无论是在实时性方面和对遮挡鲁棒性方面都表现出了很好的性能,能够应用于目前的跟踪领域,具有较强的应用价值。
[1] 田 莘.基于MeanShift算法的目标跟踪问题研究[D].西安:西安科技大学,2010:16-41.
[2] 瞿卫欣,程承旗.基于Kalman滤波的Camshift运动跟踪算法[J].北京大学学报(自然科学版),2015,51(5):799-803.
[3] 章菲菲.基于改进SIFT算法的目标识别与跟踪技术研究背景[D].北京:北京理工大学,2015.
[4] 李小红,谢成鹏,贾易臻.基于ORB特征的快速目标检测算法[J].电子测量与仪器学报,2013,27(5):455-458.
[5] LEUTENEGGER S,CHLI M,Siegwart R.BRISK:Binary Robust Invariant Scalable Keypoints[C]∥Proceedings of the IEEE International Conference on Computer Vision (ICCV) ,2011:2 548-2 555.
[6] ALAHI A,ORTIZ R,PVANDERGHEYNST P.FREAK:Fast Retina Keypoint[C]∥IEEE Cnference on Computer Vision and Pattern Recognition (CVPR),2012:510-517.
[7] 彭 欣,刘富强,刘华军.基于SURF目标跟踪算法研究[J].长春理工大学学报,2011(6):138-141.
[8] 夏晓霞,刘 欣.基于改进ASIFT的可见光图像拼接研究[J].综合电子信息技术,2014,40(5):73-75.
[9] 张云生,邹峥嵘.基于改进ORB算法的遥感图像自动配准方法[J].国土资源遥感,2013,25(3):20-23.
[10]王灿进,孙 涛,陈 娟.基于FREAK特征的快速景象匹配[J].电子测量与仪器学报,2015,29(2):204-212.
[11]索春宝,杨东清,刘云鹏.多角度比较SIFT、SURF、BRISK、ORB、FREAK算法[J].北京测绘,2014(4):23-26.
[12]曹 建,谢晓方,付霖宇,等.基于两步位操作匹配的实时目标识别跟踪算法[J].弹箭与制导学报,2013,33(2):125-128.
[13]蔺海峰,马宇峰,宋 涛.基于SIFT特征目标跟踪算法研究[J].自动化学报,2010,36(8):1 204-1 208.
刘亚伟 男,(1991—),硕士研究生。主要研究方向:无人机目标识别与跟踪。
李小民 男,(1968—),博士生导师。主要研究方向:无人机模拟仿真技术。
Comparison of Rapidity and Robustness of Tracking Algorithms Based on Binary-feature Matching
LIU Ya-wei,LI Xiao-min
(DepartmentofUAVEngineering,OrdnanceEngineeringCollege,ShijiazhuangHebei050003,China)
A Tracking algorithm based on binary-feature has been proposed to solve the problems of rapidity and robustness in the process of target tracking.The matching algorithms of binary-feature are used in object tracking,and the real-time performances are compared.Moreover,a series of experiments with occluded targets are conducted to test the robustness of the algorithms.Experiment results show that the matching speed of the tracking algorithm based on binary-feature matching is 3~4 times faster than SIFT (Scale Invariant Feature Transform) and SURF (Speeded up Robust Feature).And for occluded targets,BRISK (Binary Robust Invariant Scalable Keypoint) has the strongest robustness.
binary-feature;occlusion;rapidity;robustness
10.3969/j.issn.1003-3106.2016.11.08
刘亚伟,李小民.二值特征匹配跟踪算法的快速性和鲁棒性比较[J].无线电工程,2016,46(11):30-33.
2016-07-21
“十二五”装备预研基金资助项目(51325050101)。
TP391.9
A
1003-3106(2016)11-0030-04