无人机地面站标校方法研究
2016-02-07耿炎
耿 炎
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
无人机地面站标校方法研究
耿 炎
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
介绍了无人机地面站基于GPS的标校方法、标校原理和计算过程。目前使用的标校方法有2种:飞机标校法和信标标校法。针对每种标校方法,详细分析了标校误差存在的原因,并提出了解决方案。针对标校精度受外界因素影响大、标校过程复杂的问题,给出了一种基于寻北仪的简洁高效的标校方法,并介绍了寻北仪的工作原理。目前国内寻北仪的测量精度为0.1°,说明用寻北仪对无人机地面站进行标校是可行的。
无人机;标校;寻北仪
0 引言
无人机数据链作为连接地面站与无人机的信息纽带,是实现地面操控人员对无人机进行实时控制的信息通道,其性能和规模在很大程度上决定了整个无人机系统的性能和规模[1]。无人机地面站完成对无人机的遥控、遥测、跟踪、定位和视频信息传输功能[2]。地面站跟踪无人机有无线电跟踪和数引跟踪2种方式。在无线电跟踪模式下,通过地面站的测距测角可实现对无人机的定位,当机载GPS受干扰时,可引导飞机返航;在数引跟踪模式下,地面站利用飞机下传的定位信息,可引导天线实时对准飞机,保证链路畅通。地面站测控天线俯仰为宽波束,方位为窄波束,一般只进行方位跟踪。无人机地面站测控天线方位标校的精度直接影响着对无人机的跟踪定位精度。
1 基于GPS的标校方法
1.1 标校原理
目前无人机地面站采用的是基于GPS的标校方法,基本原理如下:地面站通过无线电搜索、跟踪测控目标,找到天线的电轴;然后将地面站和目标的GPS定位信息进行计算,得出目标基于地面站的方位角,以此作为天线的光轴的真值;地面站测控天线的光轴和电轴是平行的[3],以此对地面站方位角进行标校。
1.2 真值计算
GPS采用的是WGS-84大地坐标,使用时必须将飞机的GPS坐标值转换到以无人机地面站为原点的站心坐标[4]。下面简要介绍坐标转换方法。首先要将GPS测得的大地坐标转换为空间大地直角坐标;再将空间大地直角坐标转换为站心直角坐标;最后再将站心直角坐标转换为站心极坐标[5-7]。
首先要将GPS测得的大地坐标(纬度B、经度L和高度H)转换为空间大地直角坐标(X,Y,Z)。在同一参心坐标系中,地面点的参心空间直角坐标与相应的参心大地坐标存在以下关系[8]:

(1)

将无人机的空间大地直角坐标(X,Y,Z)转换为站心直角坐标如下:

(2)
式中,
X0、Y0和Z0为站心的空间大地直角坐标;B0和L0为站心的大地坐标的纬度和经度。
将无人机的站心直角坐标(x,y,z)转换为站心极坐标(D,β,ε):
(3)
式中,(D,β,ε)为无人机相对于地面站的斜距、方位角和俯仰角。
由于无人机地面站测控天线只对方位进行一维跟踪,方位角β即为所需的真值。
1.3 标校方法
目前采用的标校方法有2种:利用飞机进行标校和利用信标进行标校。2种方法原理相同,但由于使用方法不同,引入的标校误差不同。
1.3.1 飞机标校法
飞机停在驶入点或起飞线上,根据机场的具体情况,地面站与飞机之间的距离不确定,一般在100~1 000 m之间。地面站通过无线电搜索,最终跟踪对准飞机,飞机的GPS定位信息通过测控链路传到地面站,地面站对飞机及自身的GPS定位信息进行解算,得到方位角真值,对测控天线方位角进行标校。这种方法实现简单,通过飞机和地面站自身的信息在线完成标校。
在某些情况下,飞机标校法误差较大,原因分析如下:
① 飞机的定位信息在下传到地面站时一般会修正到飞机的几何中心。地面站跟踪的是飞机上的测控天线,飞机的定位信息并不能真实地反映测控天线的位置。对于大型无人机来说,这个误差不能忽略。
② 地面站距离飞机太近,飞机及地面站自身的GPS定位精度低,造成的方位角偏差超出波束宽度。
③ 机场的建筑、车辆及周围山体等自然环境造成的多径干扰,导致地面站测控天线跟偏。
④ 测控天线在飞机上受机体自身的反射、遮挡,造成严重的多径干扰,致使地面站跟踪偏离,这种情况导致的标校误差很大(一般会超出波束宽度),造成标校结果无法使用。
针对以上原因,在利用飞机标校时可以采用以下措施减小标校误差,使标校误差小于地面站天线的波束宽度:
① 通过几何关系,将飞机的定位信息转换成机上测控天线的位置信息,再利用测控天线的位置计算方位角真值;
② 地面站位置尽量远离驶入点或起飞线;飞机一般采用差分GPS,定位精度较高,地面站的车载或手持GPS定位精度较低,可用高精度GPS进行标定;
③ 地面站测控天线俯仰角避免出现负角度,一般要大于1°,可有效地减少多径的影响;
④ 飞机起飞后,结合航迹规划,在距离地面站5 km外,飞机沿近似径向飞行时重新标校。由于飞机升空,地面多径干扰减小,而且距离较远,标校精度可达到0.1°(地面站天线波束宽度为1.8°),可以正常引导天线跟踪无人机。如果要在天线自跟踪模式下,通过地面站测距、测角对无人机进行定位,则需要根据定位精度要求在更远距离进行标校,进一步提高标校精度。
1.3.2 信标标校法
地面站站址变更后,如果无人机不是从本场起飞,地面站需要用信标进行标校。标校方法如下:
① 在机场环境开阔的方向上,距离地面站大于1 000 m,选择一个已知坐标点(或用手持GPS采集),用支撑杆将信标架高3 m以上;
② 开启信标,地面站天线仰角为1°左右,开始方位搜索,当天线跟踪上信标时(误差电压为0),记录天线伺服系统上报的角度;
③ 按上述方法搜索5次,如果天线跟踪角度不收敛(超出波束宽带),将天线仰角抬高1°重新搜索;
④ 直到连续5次搜索的方位角收敛时,将信标机坐标手动输入监控软件,进行标校,至此完成了一个坐标点的标校。
由于机场周围建筑、车辆和山体等环境影响,无线传输不可避免地存在多径干扰。在同一坐标点,多径干扰可能相对稳定,标校结果可能存在一个固定偏差。
建议在其他方向上另选2个点进行标校,3个坐标点相对于地面站的方位差大于60°。最后对3个标校值进行平均处理,误差大于天线波束宽度的视为无效值。
2 基于寻北仪的标校方法
寻北仪是利用高精度陀螺敏感地球自转角速率,通过解算求得载体纵轴与北向之间的夹角来实现寻北功能[9]。把寻北仪水平安装在地面站舱体上,寻北仪的北向与舱体纵轴平行。在静止状态下寻北仪可以快速地测量出舱体纵轴与地理真北的夹角,即初始方位角。伺服系统的方位零度指向与舱体纵轴方向是重合的,因此该角度可以作为天线的初始方位角。
寻北仪的工作原理如图1所示[10]。
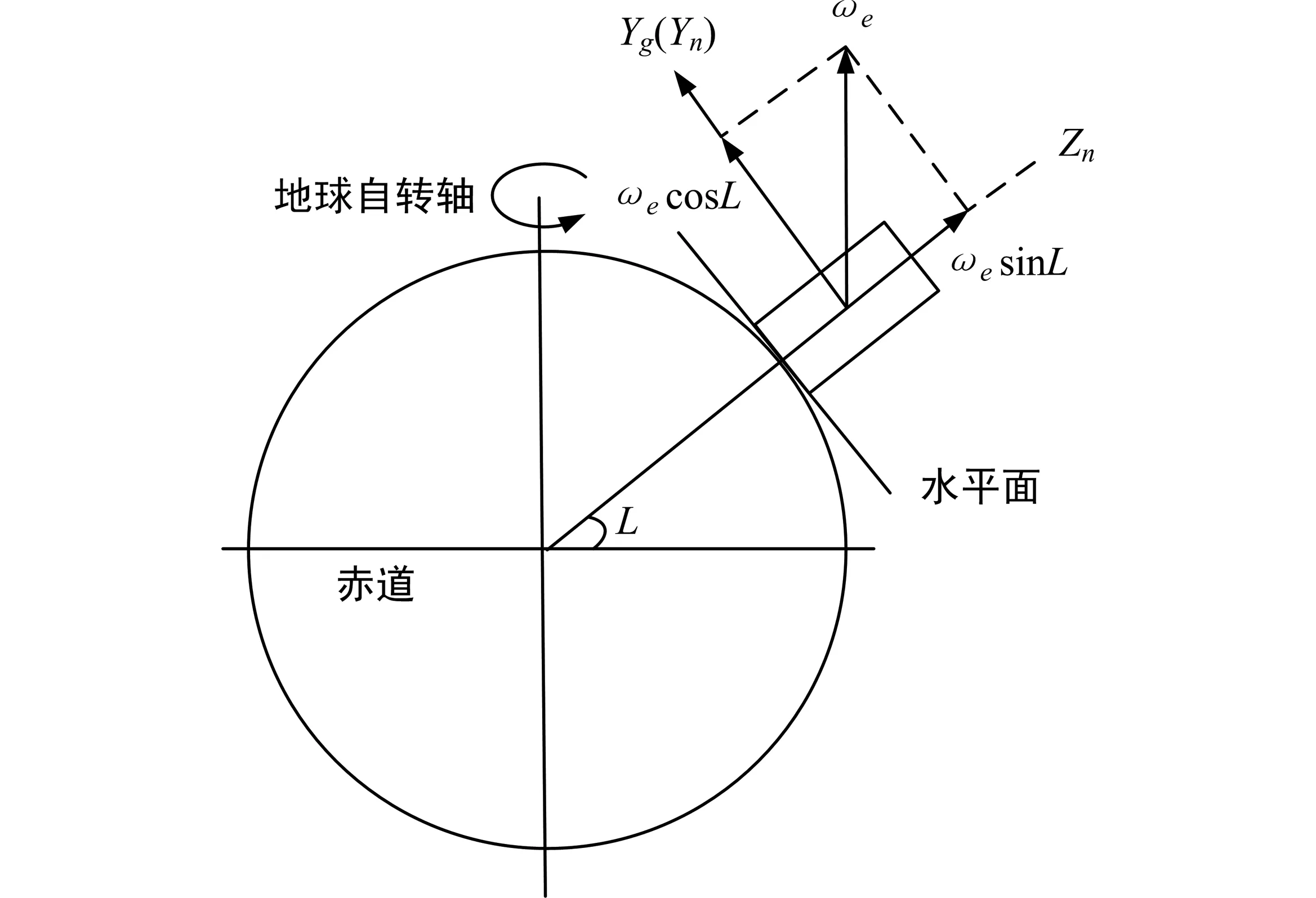
图1 寻北仪原理示意
若将寻北仪安装在载体的水平面上,使其陀螺的敏感轴Yg方向在水平面内与地理坐标的北向Yn平行,则陀螺敏感到的角速率为ωN;若敏感轴Yg在水平面内与地理北向有一夹角α,则此时陀螺输出的ω为水平分量ωN在敏感轴上的投影,即
ω=ωNcosα=ωecosLcosα。
(4)
由式(4)得,陀螺敏感轴与真北的夹角为:

(5)
同时,从式(4)可以看出,在高纬度地区,cosL接近于零,这时系统的信噪比会变小,寻北仪的精度会变差甚至完全丧失寻北功能。
寻北仪能够全天候24 h不间断工作,并具有很高的可靠性,不受气候、外磁场等外部环境的影响,且寻北仪不需要接收任何外部信息,广泛应用于雷达、火炮、坦克和汽车等载体中。
经调研国内现有寻北仪产品的测量精度能达到0.1°,远小于天线的波束宽度(1.8°),寻北时间一般不大于3 min,使用纬度小于80°,可以满足无人机地面站标校的精度要求。
3 结束语
本文研究了基于GPS的无人机地面站的标校方法,分析了误差存在的原因并提出了解决措施,该措施的可行性与有效性在工程实际标校中得到了验证。基于寻北仪的标校方法,可以满足无人机地面站的标校精度要求,简化了标校过程,缩短了标校时间,提高了无人机地面站的使用效能。
[1] 周祥生.无人机测控与信息传输系统技术发展综述[J].无线电工程,2008,38(1):30-31.
[2] 韩玉辉.无人机测控信息传输有关系统问题探讨[J].无线电工程,2008,38(8):4-6.
[3] 陈卫华,娄 亮,陈利锋.光电轴匹配对舰炮跟踪雷达指向精度的影响分析[J].现代导航,2015,6(1):35-38.
[4] 金郁萍.常用大地坐标系相互转换的设计与实现[D].成都:电子科技大学,2009.
[5] 姚景顺,杨世兴.舰载雷达的动态标校[J].火力与指挥控制,2008(3):128-130.
[6] 杜 娟,朱华邦.基于GPS技术的舰载探测系统标校方法研究[J].火控雷达技术,2013,42(1):17-20.
[7] 杨 杰,张 凡.高精度GPS差分定位技术比较研究[J].移动通信,2014,38(2):54-58.
[8] 刘大杰,施一民,过静珺.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1996:173-176.
[9] 吴 冰,秦 昆.一种快速实用方位标校方法及轴角变换系统[J].现代雷达,2003(9):36-37.
[10]段苛苛.基于光纤陀螺的寻北系统关键技术研究[D].北京:北京交通大学,2014:39-40.
耿 炎 男,(1976—),高级工程师。主要研究方向:无人机测控技术。
Study on Calibration Method for UAV Ground Station
GENG Yan
(The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China)
The paper introduces the calibration method,calibration principle and calculation process of the ground station of UAV based on GPS.There are two kinds of calibration methods used at present:aircraft calibration method and beacon calibration method.For each calibration method,the reasons for calibration errors are analyzed in detail,and the solutions are put forward.To solve the problem that the calibration accuracy is influenced by the external factors and the process is complex,a simple and efficient calibration method based on north finder is presented.And the working principle of the north finder is also introduced.At present,the measuring precision of the north finder is 0.1 degree,and it is feasible to use the finder for calibration.
UAV;calibration;north finder
10.3969/j.issn.1003-3106.2016.11.17
耿 炎.无人机地面站标校方法研究[J].无线电工程,2016,46(11):68-70.
2016-08-09
国家高技术研究发展计划(“863”计划)基金资助项目(2013AA122105)。
TN820.4
A
1003-3106(2016)11-0068-03
