基于模糊控制的转子动平衡变步长寻优方法
2016-01-28陈时桢牛青波
张 利 陈时桢 徐 娟, 牛青波
1.合肥工业大学,合肥,230009 2.洛阳轴承研究所有限公司,洛阳,471039
基于模糊控制的转子动平衡变步长寻优方法
张利1陈时桢1徐娟1,2牛青波2
1.合肥工业大学,合肥,2300092.洛阳轴承研究所有限公司,洛阳,471039
摘要:自动寻优控制是目前被广泛研究的转子自动平衡控制方法之一,但是该方法平衡精度有限且平衡时间较长,在实际应用中存在较大局限性。基于此,针对单平面双配重的转子自动平衡装置,提出了一种基于模糊控制原理的步长计算方法,并设计了变步长寻优控制算法,进而实现变步长寻优的转子自动平衡控制方法。通过自行设计并搭建的转子实验台及测控系统进行实验验证,实验结果表明该方法较传统的自动寻优控制方法在平衡精度和平衡效率上有明显改善。
关键词:转子; 动平衡; 模糊控制; 自动寻优
0引言
转子不平衡是旋转机械产生振动的主要原因之一,也是影响其稳定高效运行的关键因素。自动平衡控制作为解决转子不平衡的重要技术已成为国内外研究热点,如何从控制策略上提高其平衡效率和平衡精度是其中的核心问题[1]。
目前,对于转子自动平衡[2-3]的理论研究已经比较成熟,然而在控制策略方面的研究却不多,文献[4-5]中提出的影响系数法及文献[6]中提出的改进影响系数法都具有较快的平衡速度,但是其计算过程可能产生较大误差,且容易使振动加剧。由于自动寻优方法的原理简单,无需建立数学模型,且易于实现自动化,故其在转子动平衡中得到广泛应用,但是其动平衡精度和动平衡效率相对较低,所以还需进一步改进。文献[7]在分析控制力作用相位等基础上设计了定幅值寻相位控制方法,该方法对振动相位的提取具有很高的要求,且控制算法较复杂,动平衡效率不高。文献[8]提出了基于双盘电磁型平衡头的移动控制方法,该方法着重讨论了配重块在不同初始位置下的移动原则,能够解决平衡过程中的振动加剧的问题,但是只在仿真实验上做了验证并未进行实际应用。
因此,研究出一种能够稳定、快速地减小振动的控制策略来完成转子自动平衡,具有重要的研究意义和应用价值。本文针对单平面双配重动平衡装置,提出一种基于模糊控制[9]的变步长寻优控制方法,将模糊控制原理与自动寻优方法相结合,实现转子自动平衡控制,最后在自行设计搭建的实验台上进行实验验证,结果表明该方法是可行的并具有较好的平衡效果。
1系统架构
转子动平衡系统主要由控制单元、执行机构和转子组成,如图1所示。其中,控制单元包括模糊控制器和执行控制器;执行机构为平衡头,主要包括两个驱动电机和两个配重块[10],通过控制电机的转动可以改变平衡头中配重块的位置。
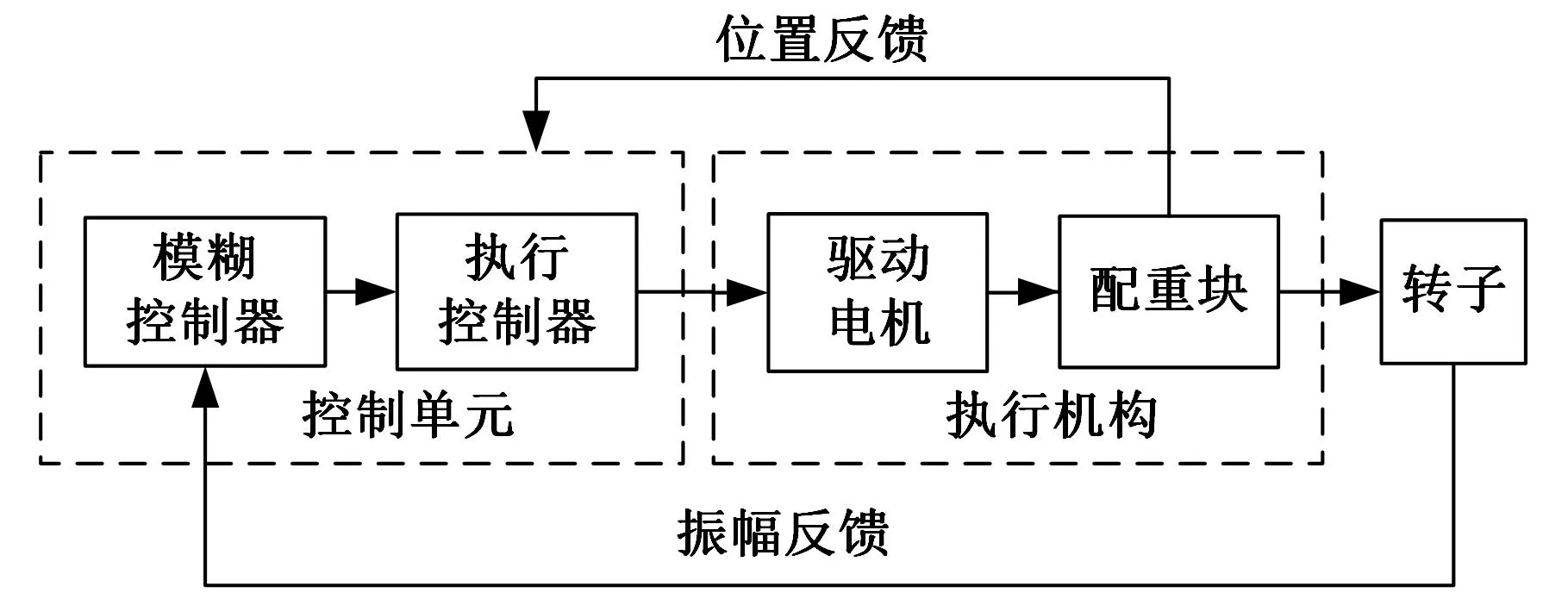
图1 系统结构框图
转子动平衡系统采用双闭环控制结构,其中外环为振幅反馈环节,主要由模糊控制器和振动传感器组成,模糊控制器作为副调节器,其输入量为振幅偏差及偏差变化量;输出量为自动寻优步长;内环为位置反馈环节,主要由执行控制器和位置传感器组成,执行控制器作为主调节器,其输入量分别是模糊控制器的输出量及位置传感器的反馈量,其输出量为电机转动控制量。
系统以振幅作为目标期望值,当其达到预先设定的精度要求时就停止运作。在未达到平衡精度时则进行相位平衡和幅值平衡操作。相位平衡操作即通过控制两电机均正转或均反转运行来改变两配重块在平衡头内近似同一平面上的周向分布,使合成的补偿离心力方向与转子系统的等效不平衡力方向相反。幅值平衡操作即通过控制某一电机正转另一电机反转,使合成的补偿离心力大小与转子系统的等效不平衡力相等。控制原理如图2所示,圆周上的白点表示不平衡量,两个黑点表示平衡头中的配重块,图2a为某一不平衡状态,当配重块移动到获得最小振幅的位置时完成平衡过程,此时如图2b所示。
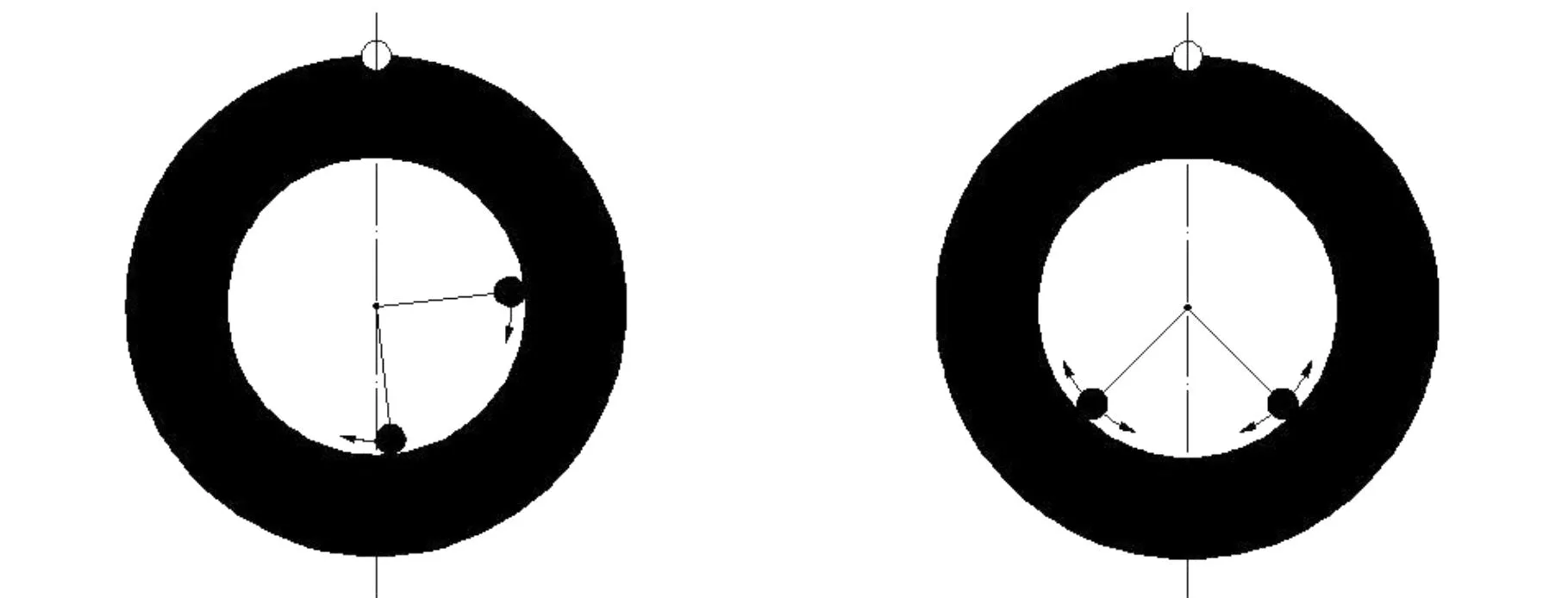
(a)不平衡状态(b)平衡状态图2 配重块结构示意图
采用这种控制方法时,配重块每次需转动的角度大小是关键问题。若转动角度过大即步长过大,虽可减少电机的启停次数,但容易造成转子不平衡的超调,尤其是当转子系统初始不平衡较大时可能导致系统故障;相反,若步长过小,虽可减少或避免不平衡量超调,但由于电机的频繁启停,增加了电机的负担,同时也增加了控制过程所需的总时间,影响了电机寿命和动平衡效率。所以需要变步长的控制策略来实现这种方案,同时转子动平衡系统从振动信号采集到执行装置动作的过程中,输入量及输出量易受外界干扰及其他因素影响,加之系统的执行装置本身就是一个比较复杂的系统,很难精确建立起数学模型。综合考虑以上问题,本研究采用模糊控制原理,其方法简单、精度较高且鲁棒性好[11],能够准确计算出电机驱动步长及两配重块移动方向,在这基础上采用自动寻优策略完成转子动平衡。
2基于模糊控制原理的步长计算方法
2.1模糊控制原理
模糊控制系统不需要建立基于系统动态特性的数学模型,但是需要确定判定规则的专家知识、经验或操作数据等,把这些作为判断依据来制定一系列判定规则从而实现自动控制过程。
模糊控制过程主要包括三大部分:量化、确定判定规则及模糊推理。利用模糊控制原理经模糊推理后最终可计算出精确输出量。模糊控制的输入量是精确量,它的输出控制量也是精确量,因此模糊控制器的控制并不模糊,它可以实现对被控对象的精确控制[12]。
2.2模糊控制器设计
本系统中幅值反馈环节采用模糊控制原理。反馈信号为转子不平衡引起的振幅,该值采用文献[13]所述的互相关算法进行提取,该方法能够在外界干扰较大的情况下准确提取振动幅值,以振幅偏差e及振幅偏差变化量Δe作为模糊控制器的输入量,其中振幅偏差为所测振幅与平衡目标值之差,振幅偏差变化量由振幅偏差求导得出;以步长值λ1作为模糊控制器的输出量,该值决定平衡头中配重块转动的角度,由此产生转子不平衡量变化。由此设计了双输入单输出的模糊控制器,具体步骤如下。
(1)模糊语言的变量定义,即将模糊控制器的输入量和输出量进行标定,将其指定到某一区间范围内,采用对称方式将输入量和输出量进行分级。振幅偏差量化为7级,即{-3,-2,-1,0,+1,+2,+3},其模糊子集取7档,即{NB,NM,NS,ZO,PS,PM,PB};振幅偏差变化量量化为5级,即{-2,-1,0,+1,+2},其模糊子集取5档,即{NB,NS,ZO,PS,PB};步长的模糊控制量化为7级,即{-3,-2,-1,0,+1,+2,+3},其模糊子集取7档,即{NB,NM,NS,ZO,PS,PM,PB}。上述NB,NM,NS,ZO,PS,PM,PB分别代表负大、负中、负小、零、正小、正中、正大。
(2)隶属度函数设定。为方便计算与编程,本研究都采用三角形隶属度函数。根据控制要求,设置输入量振幅偏差e和振幅偏差变化量Δe的中间档位相对较窄,其他各个档位相似;输出量步长值λ1的全档位相似,如图3所示。
(3)模糊判定规则是模糊控制器的核心,本研究在仿真和实验的基础上,对实验数据进行分析,最终确定判定模糊控制器输出量的模糊规则。表1为该模糊控制器的判定规则表[14]。
(4)去模糊操作。去模糊就是将输出的模糊集转换为精确值,目前采用较多的方法有最大隶属度最大值法、最大隶属度最小值法、质心法等。本文采用质心法进行去模糊操作,即将所得隶属度与其对应的论域值乘积之和除以隶属度之和,所得结果即为模糊控制器的精确输出。
3变步长寻优算法
根据系统结构要求设计了执行控制器,其作为决策中心对模糊控制器及位置反馈环节做综合处理,即将模糊控制器输出的步长值λ1和偏差变化量的正负及配重块的位置反馈信号进行相应处理并最终确定电机移动步长与方向。
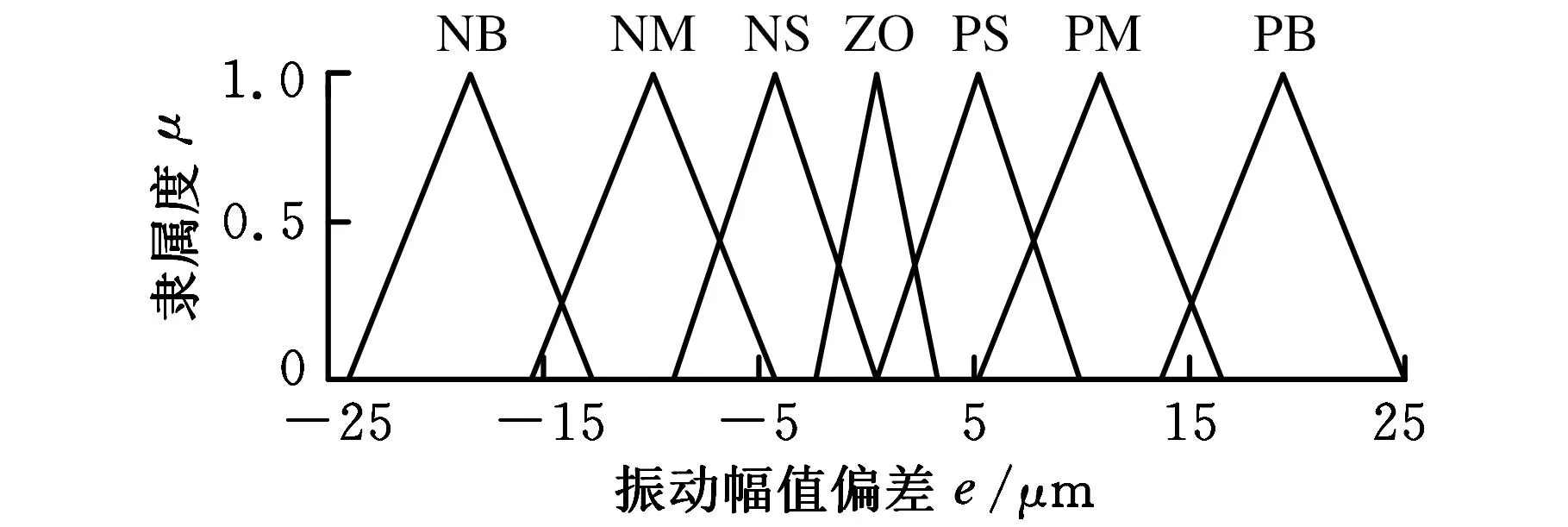
(a)e的隶属度函数
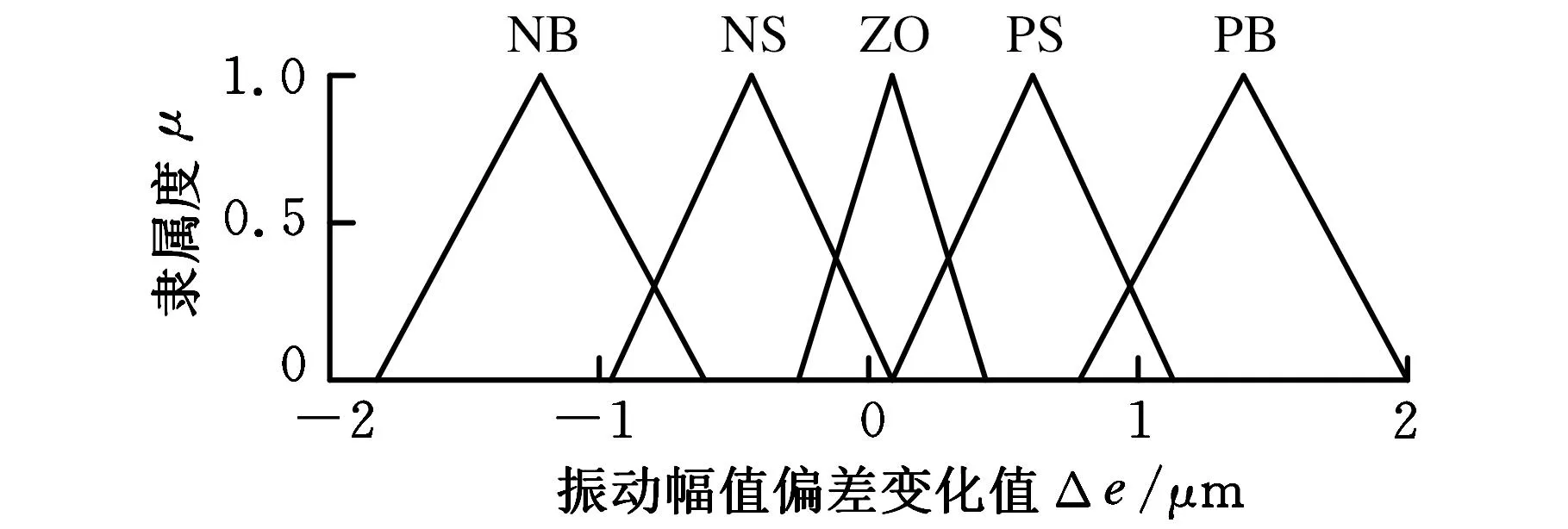
(b)Δe的隶属度函数
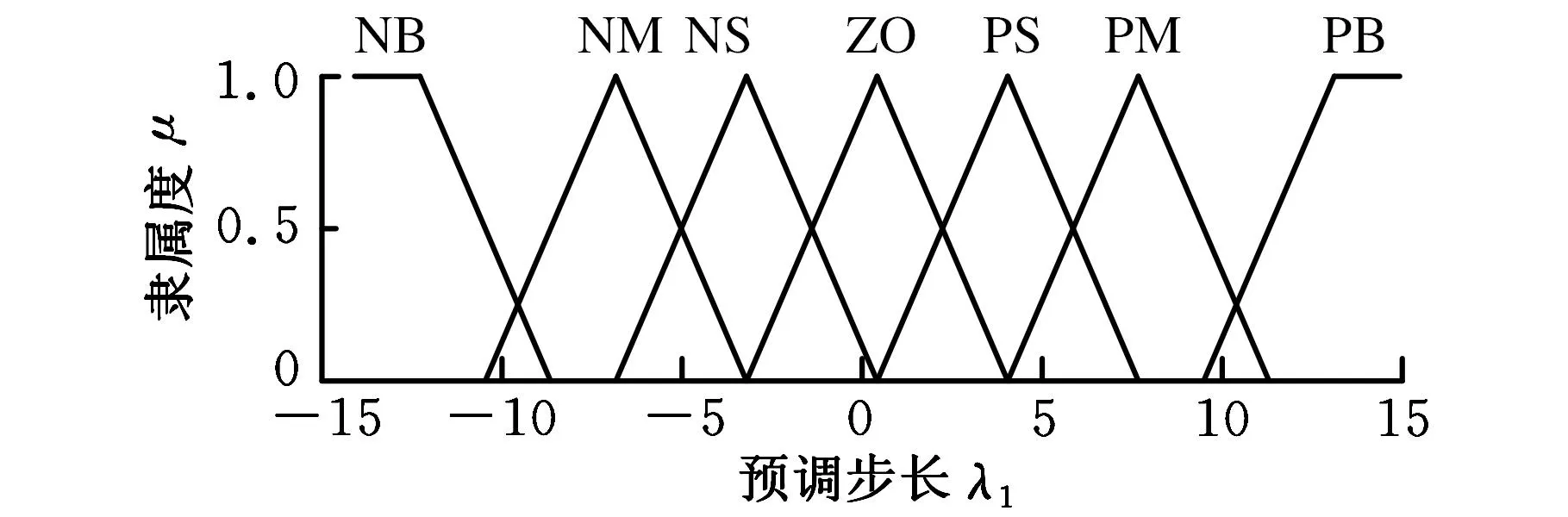
(c)λ1的隶属度函数图3 各个控制变量的隶属度函数

振幅偏差e振幅偏差的变化量ΔeNBNSZOPSPBNBPBPMPMPMPBNMPMPSPSPSPMNSPSPSZOPSPSZOPSZOZOZONSPSNSNSZONSNSPMNMNSNSNSNMPBNBNMNMNMNB
控制过程采用先进行相位平衡再进行幅值平衡的寻优算法,即如前所述通过移动两电机使振动减小,当进行相位平衡的移动使振动不再减小时则进行幅值平衡;当进行幅值平衡的移动使振动不再减小时则结束该平衡过程。执行控制器的详细控制算法用流程图来表示,如图4所示。
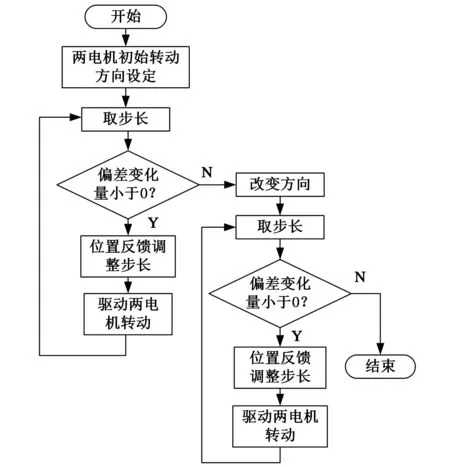
图4 执行算法流程图
该算法首先设定两电机的初始转动方向,然后获取模糊控制器的数据,即步长值λ1和偏差正负,其中,偏差用来判定电机的转动方向,若偏差小于零则说明此次操作使振幅减小,电机不改变方向,若偏差大于零则相反。
此外,上述所计算的步长值λ1还需通过位置反馈环节进行调整从而确定驱动电机的步长。调整方法采用步长补偿法,即通过位置传感器测量并计算质量块两次移动后的角度变化量Δθ,由此得到实际驱动步长Δλ,该值由线性计算得出:
Δλ=kΔθ
其中,k由配重块和电机参数决定。将其与此前的执行步长做差可得步长补偿量。
4实验验证
为验证该控制方法的有效性和转子自动平衡效果,自行设计并搭建了实验台进行实验。转子系统实物如图5所示,实验中振动幅值测量点位于右侧轴承座上表面转子中心上方,调整平面为平衡头中心平面附近。
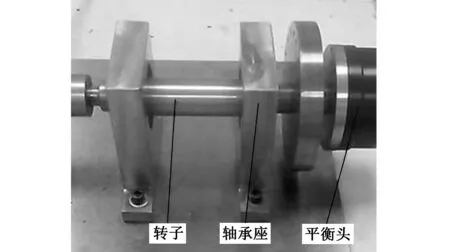
图5 转子系统实物图
对于控制器,其核心为转子自动平衡测控系统,设计了相应的硬件系统和软件系统。其中,硬件系统的主控模块使用TMS320F2812型DSP芯片,利用了其ADC、I/O、PWM等模块实现振动信号采集、输入输出及电机控制等功能[15]。软件部分采用结构化设计,用C语言编程实现振动信号处理、模糊控制器功能及执行器控制等。
为验证该控制方法的平衡效果,本研究设计了无模糊控制器下的定步长自动寻优的控制方法以作实验对比,在该实验中电机的驱动步长取中间档位,其他条件均相同。实验中转子转速为1200 r/min,初始振动幅值为25.0 μm,记录平衡过程的振动幅值变化,结果如图6所示。
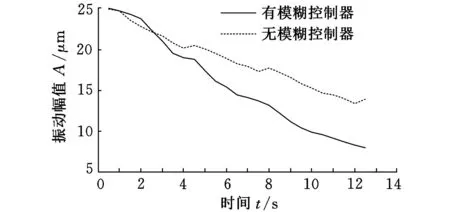
图6 振幅变化图
图6为分别采用无模糊控制器的定步长寻优方法和本文设计的模糊控制器与变步长寻优相结合的方法进行自动平衡实验所得的转子振动幅值的变化情况,可以看出:
(1)在12.5 s的平衡时间内,采用定步长寻优方法将转子不平衡引起的振动幅值由初始的25 μm减小到15 μm;而采用变步长寻优方法则可减小到8 μm以下,相对前者,该方法的平衡精度有明显提高;
(2)根据平衡过程中转子振动幅值的整体变化率可知后者的平衡速度较前者也更快;
(3)此外,采用本研究提出的方法进行自动平衡的过程中,在配重块移动方向改变的位置没有产生振幅加剧,说明该方法具有更好的稳定性。
5结束语
本文在实验的基础上针对单平面双配重动平衡装置提出了一种转子动平衡控制策略,利用模糊控制器获取步长,同时使用位置反馈环节来调整该步长,完成了变步长自动寻优动平衡控制过程,通过实验证明该方法具有较高的平衡精度和平衡效率,且该平衡过程没有振动加剧,较传统的自动寻优方法有较大的改善。
参考文献:
[1]Zhi Jingjuan, Jing Minqing, Fan Hongwei, et al. Study on Monitoring and Control System for Rotor Online Dynamic Balancing Based on DSP&FPGA[C]//The Fifth International Conference on Measuring Technology and Mechatronics Automation.Hongkong, 2013: 1072-1075.
[2]Rodriguesa D J, Champneysa A R, Friswellb M I, et al. Experimental Investigation of a Single-plane Automatic Balancing Mechanism for a Rigid Rotor[J]. Journal of Sound and Vibration, 2011, 330: 385-403.
[3]Rodriguesa D J, Champneysa A R, Friswellb M I, et al. Automatic Two-plane Balancing for Rigid Rotors[J]. International Journal of Non-Linear Mechanics, 2008, 43: 527-541.
[4]Yuan Kanga, Lina T W, Changa Y J, et al. Optimal Balancing of Flexible Rotors by Minimizing the Condition Number of Influence Coefficients[J]. Mechanism and Machine Theory, 2008, 43: 891-908.
[5]Santhana Raj A, Murali N. Early Classification of Bearing Faults Using Morphological Operators and Fuzzy Inference[J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 567-574.
[6]韩江洪,王景华,徐娟,等.具有误差处理功能的动平衡标定方法研究[J].仪器仪表学报, 2013, 34(7): 1454-1461.
Hang Jianghong, Wang Jinghua, Xu Juan, et al. Research on New Dynamic Balance Calibration Method with Measurement Error Processing Function[J]. Chinese Journal of Scientific Instrument, 2013, 34(7): 1454-1461.
[7]黄立权,王维民,苏奕儒,等.刚性转子自动平衡寻优控制方法与实验研究[J].振动与冲击, 2011, 30(5): 101-105.
Huang Liquan, Wang Weimin, Su Yiru, et al. Optimal Control Method and Test for Rigid Rotor Auto-balancing[J]. Journal of Vibration And Shock, 2011, 30(5): 101-105.
[8]曹晰,陈立芳,高金吉,等.用于转子自动平衡的双盘电磁型平衡头移动控制方法研究[J].北京化工大学学报,2010, 37(4): 121-125.
Cao Xi, Chen Lifang, Gao Jinji, et al. Study of Bi-disc Electromagnetic Balancer Movement Control for Rotor Auto-balancing[J]. Journal of Beijing University of Chemical Technology, 2010, 37(4):121-125.
[9]汪伟,赵又群,许键雄,等.基于模糊控制的汽车路径跟踪研究[J].中国机械工程,2014, 25(18): 2532-2537.
Wang Wei, Zhao Youqun, Xu Jianxiong, et al. Research on Vehicle Path Tracking Based on Fuzzy Control[J]. China Mechanical Engineering, 2014, 25(18):2532-2537.
[10]樊红卫,景敏卿,王仁超,等.磁力配重型在线自动平衡头的作动原理研究[J].西安交通大学学报,2013, 47(2): 97-102.
Fan Hongwei, Jing Minqing, Wang Renchao, et al. Actuating Principle of Online Automatic Balance with Counter Weight Driven by Magnetic Force[J]. Journal of Xi’an Jiaotong University, 2013, 47(2): 97-102.
[11]莫巨华,黄敏,王兴伟.基于模糊控制的拉式策略在装配生产控制中的应用[J].自动化学报,2011, 37(1): 118-123.
Mo Juhua, Huang Min, Wang Xingwei. Application of a Pull Strategy Based on Fuzzy Control for Production Control of Assembly Line[J]. Acta Automatica Sinica, 2011, 37(1): 118-123.
[12]方道星,余跃庆,陈炜.基于模糊控制的2R欠驱动机器人位置控制[J].机械工程学报,2008, 44(1):144-149.
Fang Daoxing,Yu Yueqing,Chen Wei. Position Control of 2R Underactuated Robot Based on Fuzzy Control[J]. Chinese Journal of Mechanical Engineering, 2008, 44(1):144-149.
[13]徐娟,罗轶超,张利,等.在线动平衡中振动信号提取方法研究[J].电子测量与仪器学报,2012, 26(11): 972-976.
Xu Juan, Luo Yichao, Zhang Li, et al. Vibration Extraction Method Research for On-line Dynamic Mass Balance[J]. Journal of Electronic Measurement and Instrument, 2012, 26(11): 972-976.
[14]赵国柱,滕建辉,魏民祥,等.基于模糊控制的电动汽车低速再生ABS研究[J].中国机械工程,2012, 23(1): 117-121.
Zhao Guozhu, Teng Jianhui, Wei Minxiang, et al. Study on Low-speed Regenerative Braking of Electric Vehicle as ABS Based on Fuzzy Control[J]. China Mechanical Engineering, 2012, 23(1):117-121.
[15]杨胜,房建成.基于双DSP的POS数据采集与处理系统的设计与实现[J].仪器仪表学报, 2008, 29(9): 1822-1826.
Yang Sheng, Fang Jiancheng. Design and Realization of POS Data Acquisition and Processing System Based on Double DSP[J]. Chinese Journal of Scientific Instrument, 2008, 29(9):1822-1826.
(编辑袁兴玲)
Variable Step Size Optimizing Method of Rotor Dynamic Balance Based on Fuzzy Control
Zhang Li1Chen Shizhen1Xu Juan1,2Niu Qingbo2
1.Hefei University of Technology,Hefei,230009
2.Luoyang Bearing Science and Technology Co.,Ltd.,Luoyang,Henan,471039
Abstract:Automatic optimization control was one of the methods in rotor dynamic balancing which was studied extensively currently, but its balance precision was limited, and the balancing time was long, so there were many limitations in practical applications. Considering the above problems, aiming at the single-plane dual counterweight block dynamic balancing device, a rotor dynamic balancing control strategy was proposed herein, which calculated the step size by fuzzy control and completed the balancing process by variable step size optimizing method. A self-designed rotor test rig was built with the measure-control system for experimental verification, and the results prove that the control strategy improves the balance precision and efficiency obviously compared with the traditional automatic optimization control method.
Key words:rotor; dynamic balance; fuzzy control; automatic optimization
基金项目:安徽省自然科学基金资助项目(1408085QE99);国家国际科技合作专项(2012DFB10060);教育部工程科技人才培养研究专项(12JDGC007)
收稿日期:2015-03-25
中图分类号:TH39DOI:10.3969/j.issn.1004-132X.2015.23.009
作者简介:张利,女,1955年生。合肥工业大学机械与汽车工程学院教授。主要研究方向为机电一体化技术。获安徽省科技进步二等奖、三等奖各1项,获安徽省教学成果一等奖、二等奖各1项。发表论文40余篇。陈时桢,男,1991年生。合肥工业大学机械与汽车工程学院硕士研究生。徐娟(通信作者),女,1982年生。合肥工业大学计算机与信息工程学院博士、助理研究员,洛阳轴承研究所有限公司博士后研究人员。牛青波,男,1981年生。洛阳轴承研究所有限公司工程师。
