平面3-RRR并联定位平台运动学分析及控制系统设计*
2016-01-22须晓锋刘玉飞王禹桥杨雪锋
须晓锋,李 威,刘玉飞,王禹桥,杨雪锋,徐 晗
(中国矿业大学 机电工程学院,江苏 徐州 221116)
平面3-RRR并联定位平台运动学分析及控制系统设计*
须晓锋,李威,刘玉飞,王禹桥,杨雪锋,徐晗
(中国矿业大学 机电工程学院,江苏 徐州221116)
摘要:设计了一种可用于精密操作的平面3-RRR并联定位平台,对并联定位平台进行运动学分析,基于LABVIEW和MATLAB设计了平台的闭环控制系统。根据设计的并联定位平台结构,加工出实物平台,搭建了实验硬件系统,编写了软件控制程序,对运动分析结果及控制系统进行实验验证。实验结果表明,所设计的控制系统可以实现对平面3-RRR并联定位平台的运动控制,运动控制精度能够达到0.05mm。设计的并联定位平台及分析结果,可为后续精密定位平台的设计及动力学分析提供指导。
关键词:并联定位平台;运动学;闭环控制
0引言
并联定位平台是一种典型的并联机构,具有结构刚度大、承载能力强、定位精度高等优点。尤其是近些年迅速发展的宏微双重并联平台,涉及到精密制造、精微操作和精密测量中的精密定位技术,分辨率、定位精度和重复定位精度可以达到亚微米至纳米级,广泛应用于微操作机器人、生物医学、精密加工等领域[1-4]。精密定位平台系统作为一种具有广泛应用前景的大行程精密定位系统,其运动控制是近年来备受科技界和控制理论界关注的一个领域[5]。对于宏微双重驱动的精密定位平台系统是一种典型的刚柔耦合系统,且受驱动机构的动态特性以及加工和安装误差的影响,更增加了系统的控制难度[6]。此外,随着现代科学技术的迅速发展和重大进步,定位平台系统的工作速度和运动精度的要求越来越高。设计宏微双重驱动的精密定位平台并进行运动学和动力学分析,首先要对宏动并联定位平台的动态特性进行分析。为此,本文设计了一种平面3-RRR并联定位平台,并进行运动学分析,基于LABVIEW和MATLAB设计闭环控制系统,并通过实验对所设计的控制系统的有效性进行验证。本文设计的并联定位平台以及分析结果,可为后续精密定位平台的设计及动力学分析提供指导。
1平面3-RRR并联定位平台设计及运动学
分析
1.1机构设计
如图1所示,本文所设计的平面3-RRR并联平台由动平台、静平台和3组连杆组成。为了表征平台的刚柔耦合特性,连杆采用弹簧钢材料的弹性连杆,每组连杆分别由1根主动杆和1根从动杆通过转动副(R)相连,主动杆的另一端与电机通过转动副(R)相连,从动杆的另一端与动平台通过转动副(R)相连。通过电机控制,使动平台实现平面内两个方向的移动和绕垂直平面轴的转动。
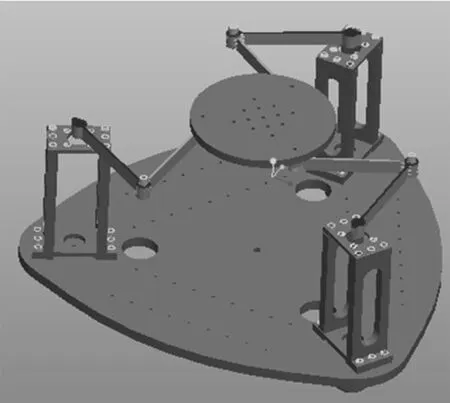
图1 平面3-RRR并联定位平台模型
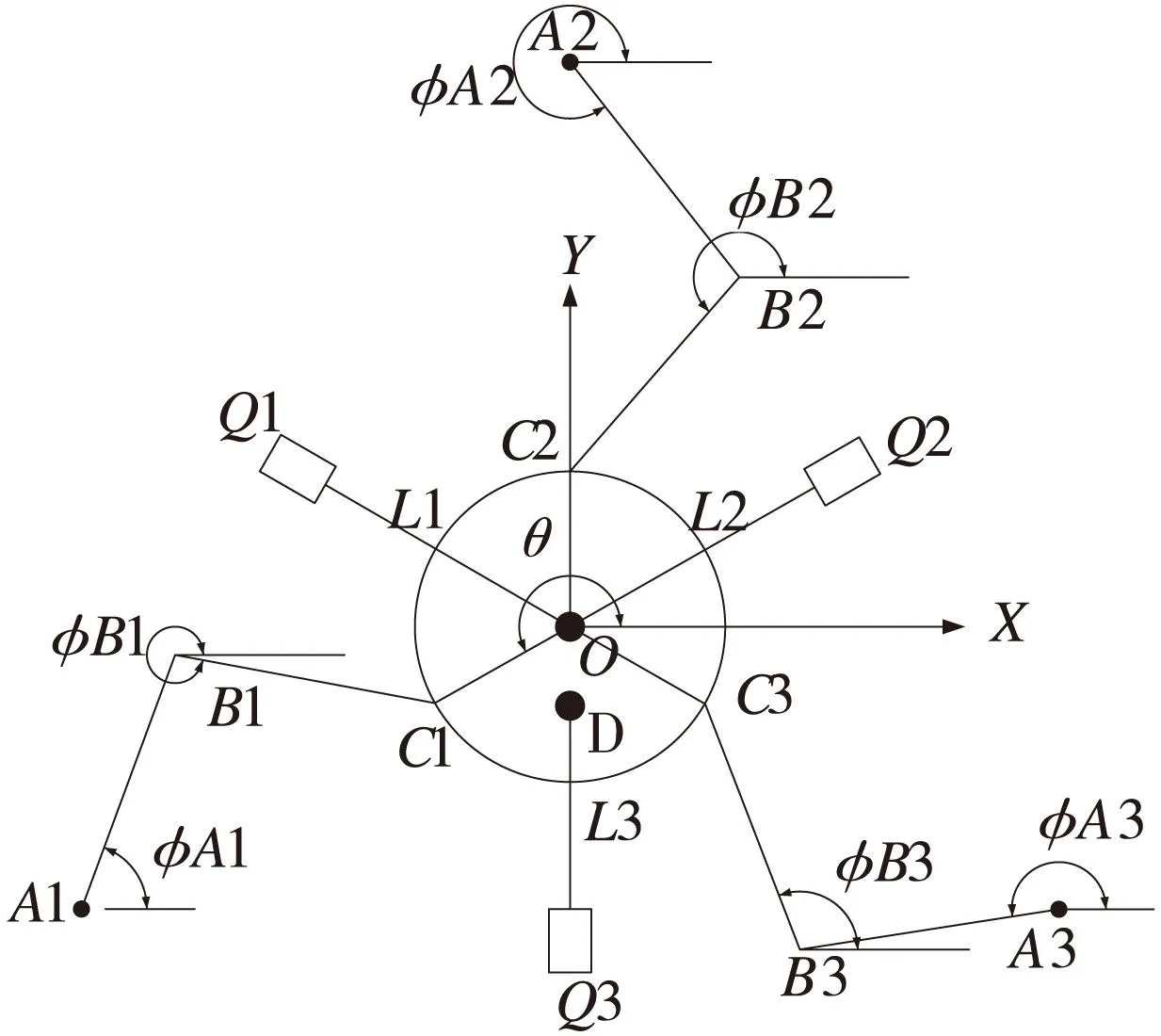
图2 平面3-RRR并联定位平台机构简图
1.2运动学分析
为了设计并联定位平台的控制系统,首先对并联定位平台进行运动学分析。如图2所示,正三角形A1A2A3表示静平台,以其中心点为坐标原点建立如图所示的坐标系;OC1C2C3表示动平台,其位置和姿态由中心点O坐标(X,Y)和OC1与X轴正方向夹角θ表示。A1B1、B1C1、A2B2、B2C2、A3B3、B3C3表示六根连杆,φA1、φB1、φA2、φB2、φA3、φB3分别是其与X轴正方向的夹角。Q1、Q2、Q3为三个拉线尺传感器,一端固定于已知坐标点处,Q1、Q2另一端连接于动平台中心O点,Q3另一端连接于动平台上D点,OD与X轴正方向夹角为θ+60°,OD距离为d,L1、L2、L3为其拉线的长度。
1.2.1位置逆解
平面3-RRR并联定位平台的位置逆解[7]即在平台结构参数已知的情况下,由动平台的预期位置(X,Y)和姿态(θ)求解出3个电机的姿态(φA1,φA2,φA3)的过程。
由图2可得矢量方程组:
A1B1+B1C1=A1O+OC1
(1)
A2B2+B2C2=A2O+OC2
(2)
A3B3+B3C3=A3O+OC3
(3)
由式(1)~(3)可得:
acosφA1+bcosφB1=R1cosφ1+rcosθ1
(4)
asinφA1+bsinφB1=R1sinφ1+rsinθ1
(5)
acosφA2+bcosφB2=R2cosφ2+rcosθ2
(6)
asinφA2+bsinφB2=R2sinφ2+rsinθ2
(7)
acosφA3+bcosφB3=R3cosφ3+rcosθ3
(8)
asinφA3+bsinφB3=R3sinφ3+rsinθ3
(9)
式中:a为连杆A1B1、A2B2、A3B3的长度,b为连杆B1C1、B2C2、B3C3的长度,R1、R2、R3分别为OA1、OA2、OA3的距离,φ1、φ2、φ3分别为OA1、OA2、OA3与X轴正方向的夹角,r为动平台半径OC1、OC2、OC3的长度,θ1、θ2、θ3分别为OC1、OC2、OC3与X轴正方向的夹角。
联合式(4)~(9)消去φB1、φB2、φB3,即可解出φA1, φA2, φA3的值。
1.2.2传感器测量
在静平台坐标系中,拉线尺传感器Q1、Q2、Q3的固定点坐标分别为(X1,Y1)、(X2,Y2)、(X3,Y3),动平台中心点坐标(X,Y)。
则有:
(X1-X)2+(Y1-Y)2=(L1)2
(10)
(X2-X)2+(Y2-Y)2=(L2)2
(11)
(X3-XD)2+(Y3-YD)2=(L3)2
(12)
式中:
XD=X+d·cos(θ+60) YD=Y+d·sin(θ+60)
L1,L2,L3—传感器的测量值
由式(10)、(11)可得到动平台中心点坐标(X,Y),代入式(12)可得到动平台姿态θ。
2平面3-RRR并联定位平台控制系统设计
在并联机构中,各驱动轴的运动是相互耦合的,动平台的运动量是各驱动轴运动量的非线性映射,各驱动轴的运动量之间也是相互影响的。因此并联机构的控制并不是单一的控制各个驱动轴的运动量,而是要求自行设计、配置控制硬件和软件,从而实现并联机构各轴的同步运动,使动平台实现所需求的运动轨迹。本文设计的并联定位平台的控制系统采用“PC+运动控制器”[8]的形式。运动控制流程如图3所示。所设计的控制系统是一种闭环控制流程,首先对动平台的运动轨迹进行离散,然后根据逆解运算映射到三个电机的转角,最后由运动控制卡控制电机进行按个插补点进行插补运动[9]。
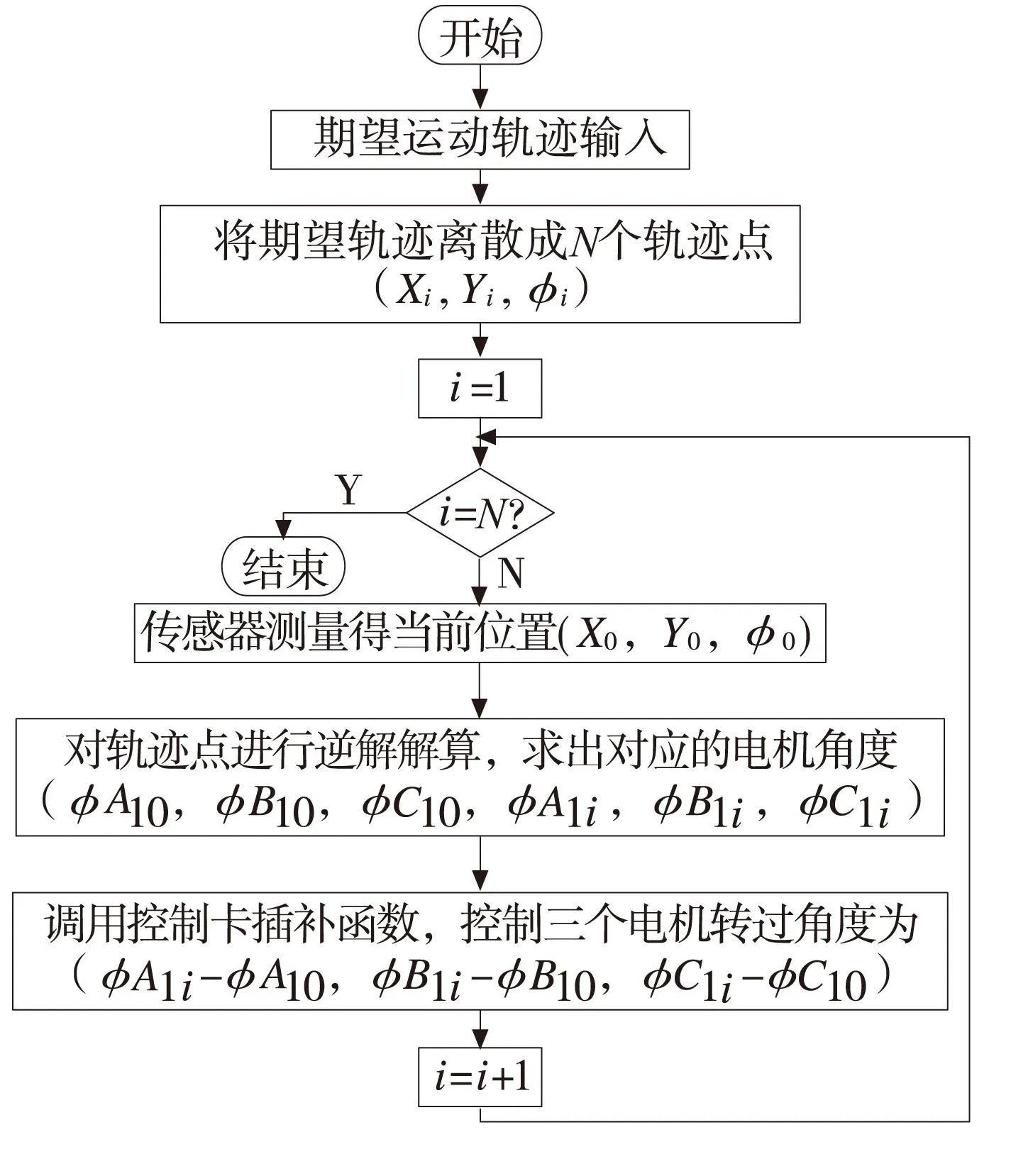
图3 控制程序流程图
系统中PC机具有强大的数据运算和信息处理能力,运动控制卡以PCI插卡形式嵌入PC机中,具有较好的运动控制和实时控制能力。该控制系统具有开放性程度高,信息处理能力强,实时调整优点突出,运动控制轨迹准确,通用性好的优点。同时运动控制卡提供了各种运动函数的动态链接库,上位机LABVIEW 可以直接调用,不仅大大缩短了产品的研制和开发周期,而且能够实现更加完美的运动控制系统。拉线尺传感器的实时反馈可以消除运动过程中的累计误差,提高系统的精度。
3实验验证
3.1实验系统硬件
根据设计的并联定位平台结构,加工出实物平台,并设计控制系统。如图4所示,所设计的控制系统采用“PC+运动控制卡”的控制方式,由PC机完成平台逆解的解算,调用运动控制卡运动函数来控制步进电机转动;步进电机驱动平台运动的同时,拉线尺传感器实时检测平台位置,由PC机调用运动控制卡get函数来获取,从而实现闭环控制。
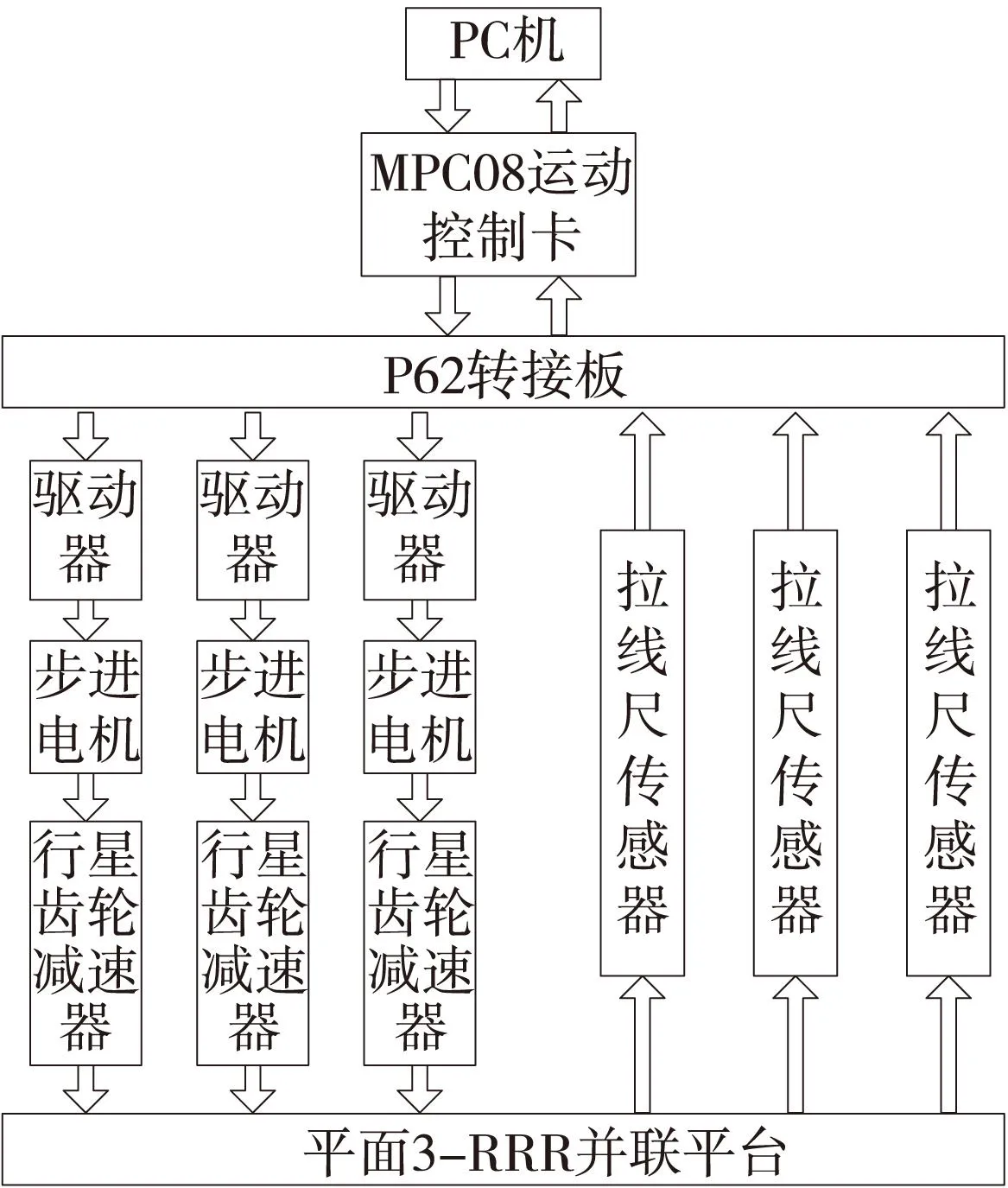
图4 控制系统原理图
图5为控制系统的实物图,运动控制卡采用乐创公司的MPC08运动控制卡,该卡提供了三轴插补运动函数;电机采用57型行星减速步进电机,步距角为1.8°,驱动器细分数为32,减速器减速比为198;传感器采用鹏力达公司的拉线尺传感器,4倍频时精度为0.01mm。
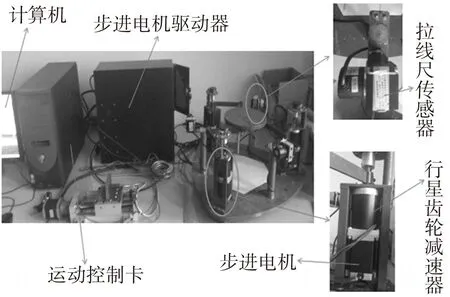
图5 控制系统硬件连接图
3.2上位机软件
本文设计的上位机软件采用LABVIEW和MATLAB的联合[10],LABVIEW是一种图形化的编程语言的开发环境,具有各种齐全的功能模块,用户编程、调试通俗易懂;MATLAB是一种具有强大的数学计算能力的软件,通过调用MATLAB进行逆解运算,有效地降低了LABVIEW单步循环的时间,从而可以大大提高系统的实时性。
图6为平台控制系统的LABVIEW界面,程序设计了直线运动和圆弧运动两种轨迹输入模块,设计了平台初始化调节模块和电机正反转时的简单补偿模块,可以给出平台仿真轨迹、速度和实际轨迹速度的对比曲线和对比动画。
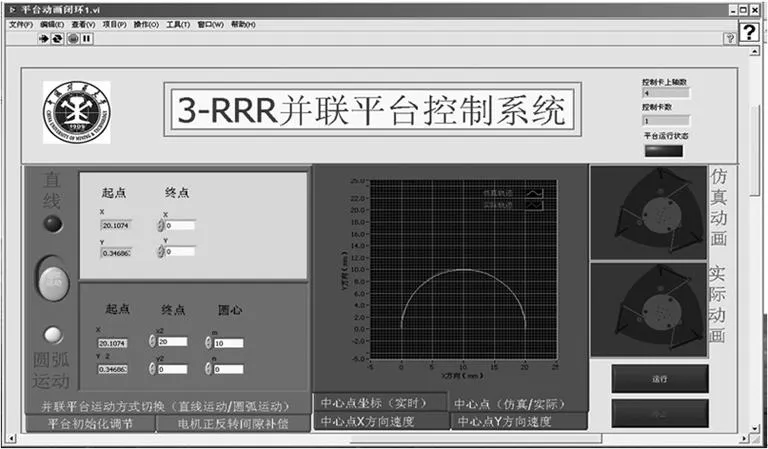
图6 控制系统LABVIEW界面
3.3实验结果
系统各硬件组装好后,细微调节三个电机使动平台中心与底座中心对准,动平台转角转至初始角度,清零传感器保存数据。切换运动方式为直线运动,输入终点坐标(16mm,-16mm),其运动轨迹与速度如图7所示。控制平台运动至原点(0,0);切换运动方式为圆弧运动,输入终点坐标(30mm,0)和圆心坐标(15mm,0),其运动轨迹与速度如图8所示。由图7和图8并结合导出的运动数据表1、表2可知,运动控制精度能够达到0.05mm,而在电机转向改变处主要因电机间隙因素的影响控制精度为0.5mm,通过调整电机间隙可进一步提高运动精度。
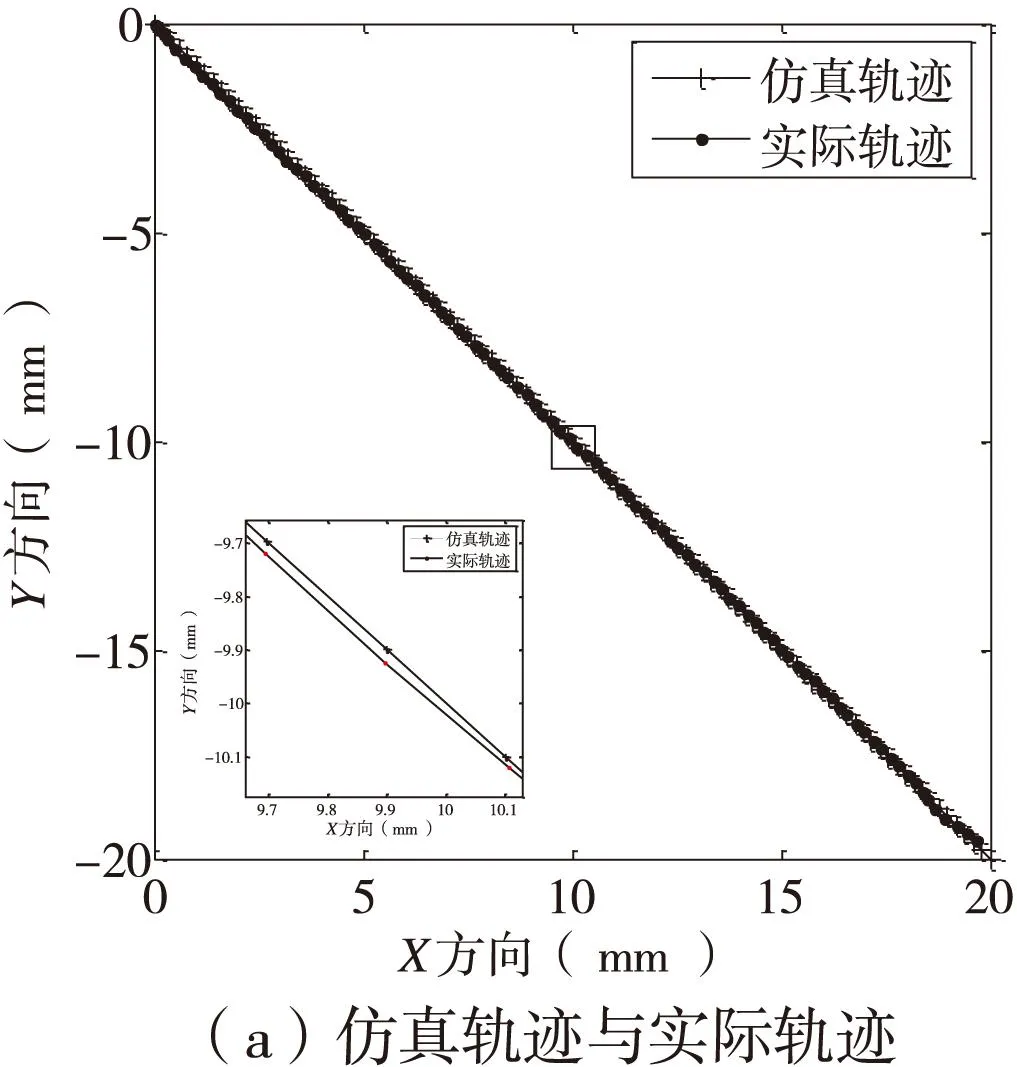
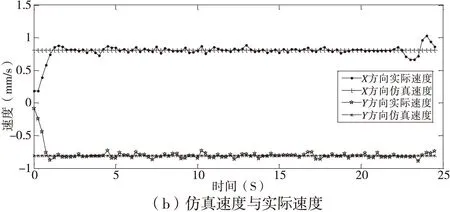
图7 直线运动轨迹与速度曲线对比
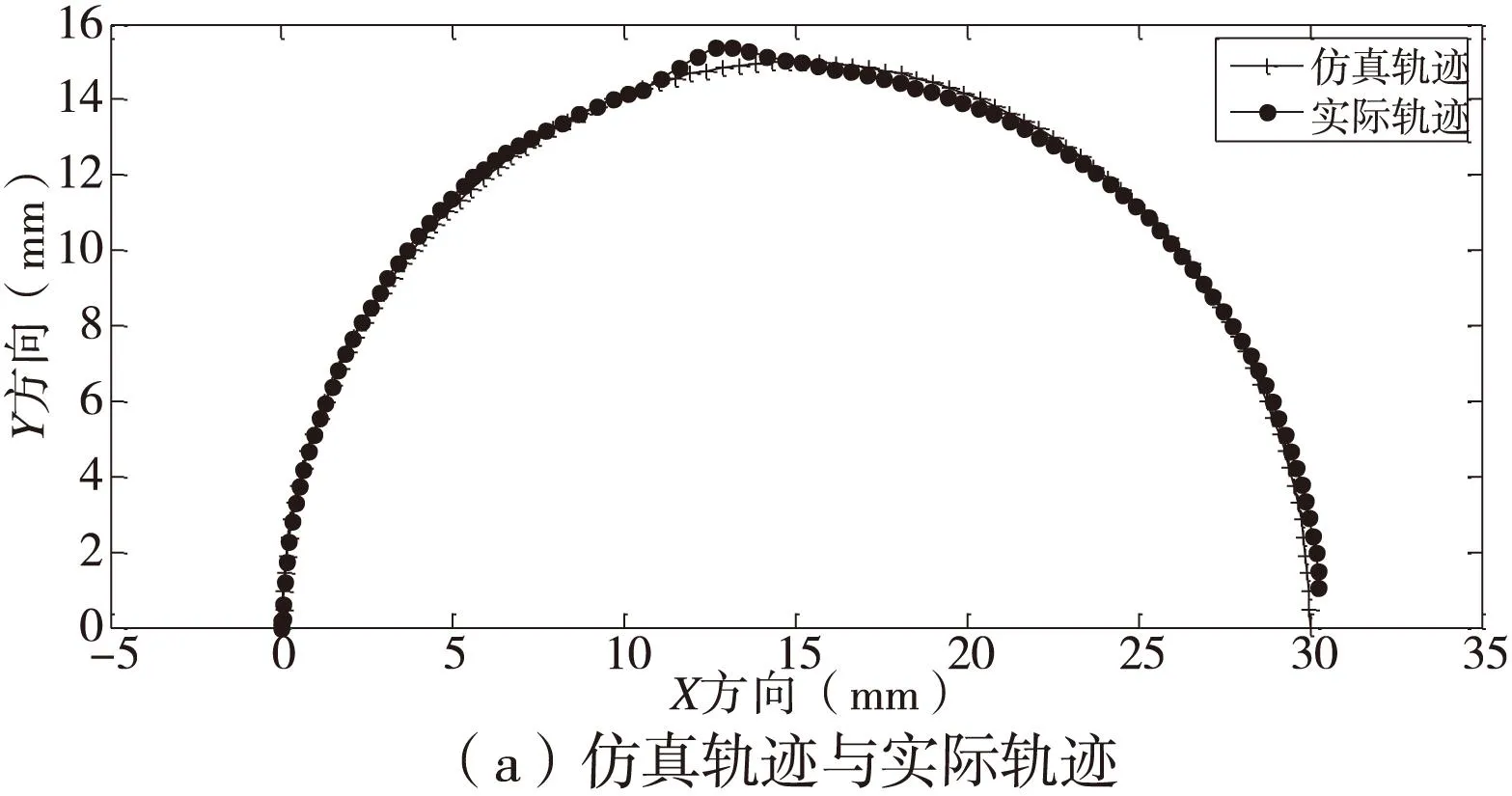
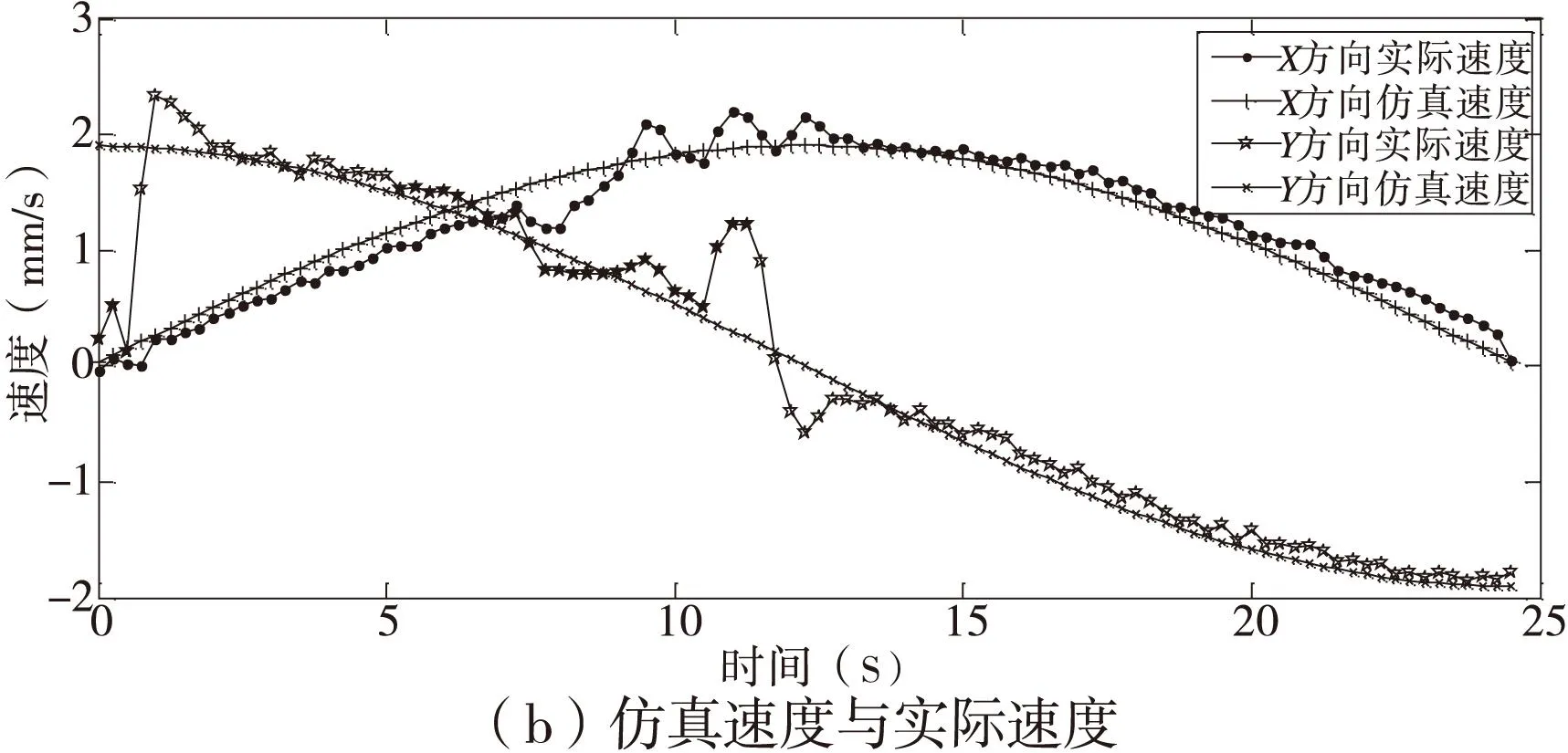
图8 圆弧运动轨迹与速度曲线对比
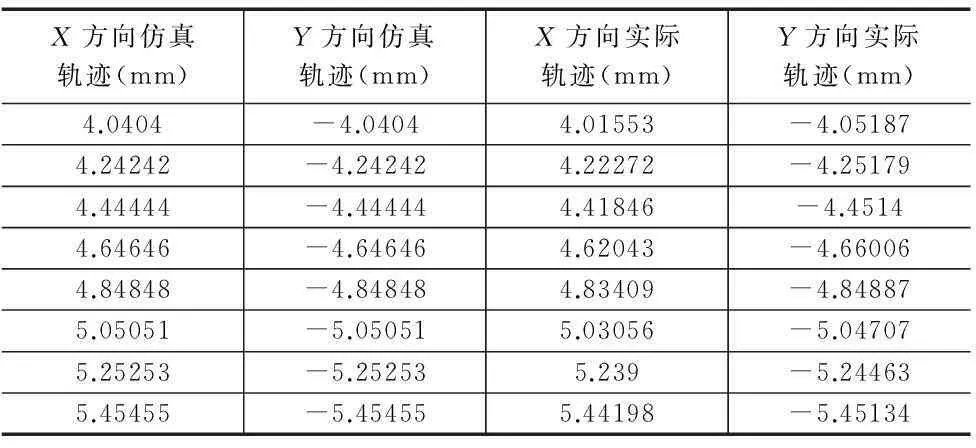
X方向仿真轨迹(mm)Y方向仿真轨迹(mm)X方向实际轨迹(mm)Y方向实际轨迹(mm)4.0404-4.04044.01553-4.051874.24242-4.242424.22272-4.251794.44444-4.444444.41846-4.45144.64646-4.646464.62043-4.660064.84848-4.848484.83409-4.848875.05051-5.050515.03056-5.047075.25253-5.252535.239-5.244635.45455-5.454555.44198-5.45134
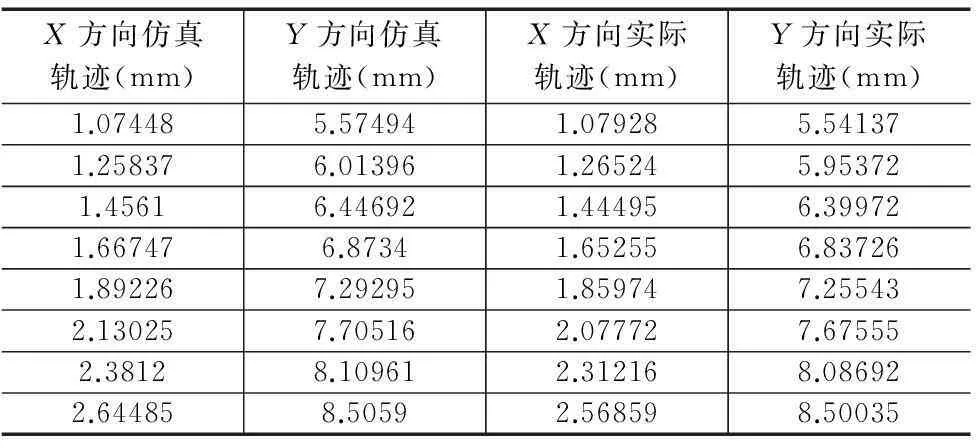
表2 圆弧运动轨迹部分数据表
4结论
本文设计了平面3-RRR并联定位平台并进行运动学分析,根据运动分析结果设计了控制系统。结合加工出的定位平台实物,搭建实验硬件系统,编写软件控制程序,对运动分析结果及控制系统进行了实验验证。结果表明,所设计的控制系统可以实现对平台的运动控制,同时通过拉线尺传感器的实时反馈可以消除运动过程中的累计误差,运动控制精度能够达到0.05mm。
[参考文献]
[1] 高峰.机构学研究现状与发展趋势的思考[J].机械工程学报,2005,41(8):3-17.
[2] 李杨民,汤晖,徐青松,等.面向生物医学应用的微操作机器人技术发展态势[J].机械工程学报,2011,47(23):1-13.
[3] 马立,荣伟彬,孙立宁,等.面向光学精密装配的微操作机器人[J].机械工程学报,2009,45(2):280-287.
[4] Dan Zhang, Xiaoping Su, Zhen Gao,et al. Design, analysis and fabrication of a novel three degrees of freedom parallel robotic manipulator with decoupled motions [J]. International Journal of Mechanics and Materials in Design, 2013, 9(3):199-212.
[5] 张金龙,刘阳,郭怡倩,等.纳米级超精密定位工作台的研究[J].机械工程学报,2011,47(9):187-192.
[6] 刘定强,黄玉美,谢礼,等.压电型宏微双驱动精密定位系统点位协调控制[J].农业机械学报,2011,42(4):220-223.
[7] 高名旺,张宪民,刘晗.3-RRR高速并联机器人运动学设计和实验[J].机器人,2013,35(6):716-722.
[8] 印松,汪烨,唐矫燕.基于GALIL运动控制卡的并联机构控制系统设计[J].机床与液压,2013,41(22):119-121.
[9] 李云峰,杨兆宜,李长峰.精密并联机器人运动轨迹规划的研究[J].机床与液压,2009,37(10):67-71.
[10] 谢立臣,王海博,颜亮.基于LABVIEW的3-UPS-1-PS并联机构控制系统设计[J].河北工程大学学报,2012,29(4):101-105.
(编辑赵蓉)
The Kinematic Analysis and Control System Design of the Planar 3-RRR
Parallel Positioning Platform
XU Xiao-feng, LI Wei, LIU Yu-fei, WANG Yu-qiao, YANG Xue-feng, XU Han
(School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou Jiangsu 221116,China)
Abstract:A planar 3-RRR parallel positioning platform which can be used for precision operation was designed. The kinematic analysis of the platform was presented, and the loop-locked control system of the platform was designed by the LABVIEW and MATLAB. According to the design of the parallel positioning platform and the control system, the experimental system was conduct. The experimental result indicates that the designed control system can meet the requirements of the motion control and the precision can approach to 0.05mm. The design and analysis of the parallel positioning platform is meaningful for the dynamic analysis and control of the platform in the future.
Key words:parallel positioning platform;kinematic;loop-locked control
中图分类号:TH112;TG506
文献标识码:A
作者简介:须晓锋(1991—),男,江苏江阴人,硕士,研究方向为精密定位平台设计及分析,(E-mail)411342965@qq.com。
*基金项目:国家自然科学基金资助项目(51305444);教育部博士点基金(20120095120013); 江苏省科技计划项目(BY2014028-06)
收稿日期:2015-01-14
文章编号:1001-2265(2015)12-0097-03
DOI:10.13462/j.cnki.mmtamt.2015.12.026