基于激光尺的机床动态测试系统特性研究*
2016-01-22姜歌东窦成东
姜歌东,窦成东,陈 疆
(1.西安交通大学 装备智能诊断与控制研究所,西安 710049;2.长安大学 道路施工技术与装备教育部重点实验室,西安 710064)
基于激光尺的机床动态测试系统特性研究*
姜歌东1,窦成东1,陈疆2
(1.西安交通大学 装备智能诊断与控制研究所,西安710049;2.长安大学 道路施工技术与装备教育部重点实验室,西安710064)
摘要:激光尺具有测量精度高、测量范围不受物理限制,配置简便等特点。文章利用激光尺测量装置,进行了数控机床综合动态特性在线测试。首先,研究了激光尺的安装调试和测试方法,提出了快速简洁的激光光路调整方法;其次,通过对影响激光尺测试精度的相关因素进行深入实验分析,提出减少外界因素干扰的有效方案;最后进行了基于激光尺的数控机床进给系统动态特性实际测试,证明激光尺测试装置在数控机床动态特性测试中的准确性与实用性。
关键词:激光尺;动态测试;机床;进给系统
0引言
数控机床的加工误差最终积累在末端工件上,对加工工件和机床的动态检测是控制加工精度的关键。激光测量准确度高、动态响应快、测量范围大,能非接触测量。激光测量装置有激光干涉仪、激光尺及专用的激光测量装置等,用于机床运动检测、工件的精密测量和机器人运动定位等。激光干涉仪属于外置传感器,价格较高,安装调整费时、复杂,需专业人员操作。开发专用测量装置需专业技术和较高的成本。对用户来说,利用以上两种装置获取机床的状态信息并非合理的解决方案。激光尺是基于多普勒激光原理开发的位置检测装置,具有结构紧凑,易于安装,阿贝误差小,性价比高等特点。激光尺安装在工件夹持部位,采集工件的位移信息,实现机床系统的动态检测。
从文献报道来看,相关的研究主要集中在基于激光尺的产品研发方面。苏州光动精密仪器公司把LSD激光尺安装在Ingersoll公司的高速机床上,提高了机床的运动速度、进给速度和加、减速度的精度[1]。清华大学的李鑫利用激光尺,解决了平面电机在较大加速度运动条件下,前馈系数难以提高的问题,提高了加、减速阶段的伺服性能[2]。日本庆应大学的Hiroaki Iwai和Kimiyuki Mitsui开发了基于激光尺的三位坐标检测装置,能测量任意数控机床的刀具路径,用于立式加工中心的直线和环形路径的测量[3]。浙江大学的王金宝对激光尺的光点精度检测的目标识别算法进行了研究,对目标识别的轮廓跟踪法和轮廓提取法进行了分析和比较[4]。激光尺还用于构建无传感器信息的数控机床进给系统[5-6]。但是,在安装和使用过程中,很多因素会影响激光尺的工作可靠性和检测精度。如何正确的安装激光尺、选择合适的测量方法,以发挥激光尺的高精度检测性能,是利用激光尺的关键。而且,从目前已发表的文献来看,这方面相关的研究报道较少。因此,在国家863计划“高档数控机床综合动态特性在线测试系统”的支持下,利用开发的基于激光尺的“高档数控机床综合动态特性在线测试系统”。进行了如下研究和实验:激光尺的安装、调试;激光尺光路快捷的调整方法;基于激光尺的数控机床进给系统动态特性实际测试;外界干扰对激光尺测试的分析;半闭环条件下,激光尺、光栅尺、编码器的对比测试。
1高档数控机床综合动态特性在线测试系统
组成
高档数控机床综合动态特性在线测试系统采用“PC+PCI扩展卡”结构。系统硬件主要包括:①激光尺,雷绍尼(Renishaw)公司的RLU10型激光尺,传感器网络组成多轴的环境补偿系统;②数据采集卡,NI公司的PCI-6602采集卡;③辅助器件,包括:补偿电源、辅助的Reset开关、集线盒等。测试系统软件用于对数控机床进给系统动态特性,主轴部件轴心轨迹和振动特性进行测试和分析;对加工运行状态进行在线实时监测及信号的采集分析;对采集信号进行分析,并且能对伺服进给系统状态进行分析处理。
2数控机床动态特性测试实验
数控机床以“PC+PMAC运动控制卡”作为控制单元。在运动过程中,激光尺不断将反馈信号传回控制单元,控制单元通过比较反馈信号与NC指令调整输出的控制信号,实现精确控制。
2.1激光尺测试装置的安装与调试
微小的机械振动会使激光尺产生较大的测量误差,激光尺应安装可靠、且便于调整光路。在两轴联动测量时,Y轴方向的发射器和反射镜要能跟随X轴的导轨同步移动。
2.1.1激光反射镜的安装
用磁铁夹具通过中间通孔夹紧反射镜,磁铁贯通以增加吸附力;为保证激光水平方向的精度,以工作台为基准;将反射镜吸附在工作台侧面;不必重新调整竖直方向的光路,分别以X轴方向90°,Y轴方向270°安装反射镜。
2.1.2激光发射器的安装
用配有水平仪的三脚架固定测量X轴运动的激光发射器。移动三脚架,使光路射在反射镜后,平行返回。以导轨为基准,把测量Y轴运动的发射器水平安装在X轴导轨上。为保证激光光线平行,左右转动发射器,使光路平行返回。为防止光路在测量过程中发生偏移,发射器四周用磁铁夹紧,用铁条吸附固定。
2.1.3激光尺的光路调整
在测试过程中,若光路和机床的运动轴线不平行,光路将会偏移,致使数据将无法采集,需要调整光路和运动轴平行。通过试验,得到的调整方法:将靶标置于反射镜上,移动机床工作台到近端,将光点打在靶心,然后将工作台移动到远端;若光点依然在靶心,说明激光尺的光路已经校准;若光束偏离靶心,说明光束与工作台运动轴线不平行,再旋转三脚架调节手柄进行调整。
2.2两个激光尺的测量对比实验
在实验中,检测的圆运动误差一定包含激光尺的安装误差。为进一步探究安装误差对激光尺精度检测的影响,比较X、Y轴的激光尺测量机床沿X轴运动的结果。机床以速度5mm/s沿X轴走80mm,用两个激光尺测量工作台的位移,测量数据完全重合。由于坐标单位为mm,激光尺之间的差值为μm级而被淹没,分别以时间和位移为坐标轴做出两激光尺的差值,如图3、图4所示。图3中,在0~10s时,机床没有运动,但两个激光尺测量值存在6μm差值。说明两个激光尺中至少有一个的信号波动。图4中,在测量过程中,两激光尺的测量值有大约6μm的差值,且有不规则的波动;如此重复4次,结果相同。这6μm的差值可能是由于激光尺的几何误差、安装误差以及外界干扰造成。但由几何误差的理论分析可知,在运行位移为80mm时,激光尺的几何误差不超过3μm;所以这6μm差值是由于安装不可靠,还是激光尺受到外界干扰造成的,需进一步深入的研究。
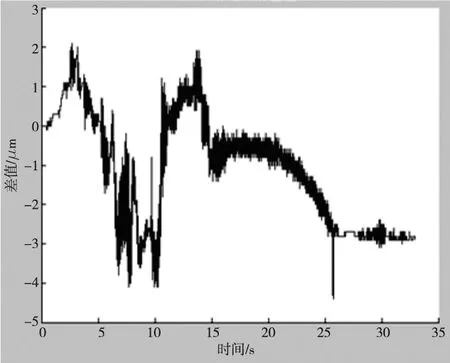
图3 时间为横坐标的两激光尺的差值图
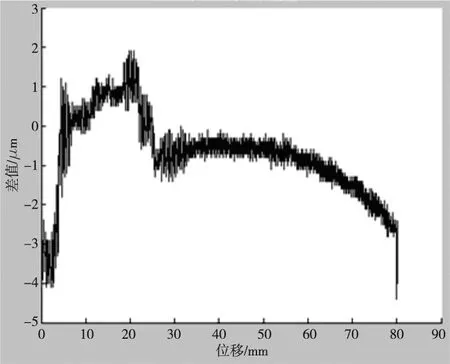
图4 位移为横坐标的两激光尺的差值图
2.3外界干扰因素实验
为查明外界干扰对激光尺检测精度的影响,对光栅尺、编码器和两个激光尺的测量数据进行比较。光栅尺检测工作台底部的位移;编码器检测伺服电机的位移;一个激光尺发射器装在三脚架上,另一个装在导轨上;两个反射镜都装在机床工作台的中部,检测工作台的位移。测试过程中,外界干扰主要是:人走动引起地面震动,工作台的碰击和实验室门开闭引发的实验室整体震动。采用重锤敲击地面、敲击工作台和关闭实验室门等方式模拟外界干扰。
2.3.1重锤敲击地面震动
重锤敲击地面,三类传感器采集到工作台的振幅数据,如图5所示。可见,三角架上安装的激光尺采集到的工作台震动幅值可达到6μm。为更清楚比较编码器、光栅尺和激光尺采集到的数据,把三脚架上的激光尺采集到的数据进行屏蔽,重新作图,如图6所示。在图6中,重锤敲击地面时,编码器、光栅尺和工作台上安装的激光尺采集到的工作台的位移变化不大(≤0.6μm)。产生此结果的原因是三脚架的刚度比较低,重锤敲击地面时产生的机械振动造成三脚架在水平面内的摆动;而试验台的质量很大,地面的机械振动对其影响较小。地面振动对编码器、光栅尺和安装在工作台上的激光尺测试精度的影响不大。
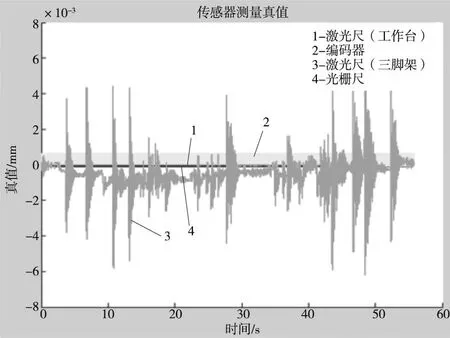
图5 重锤敲击地面工作台产生的振幅
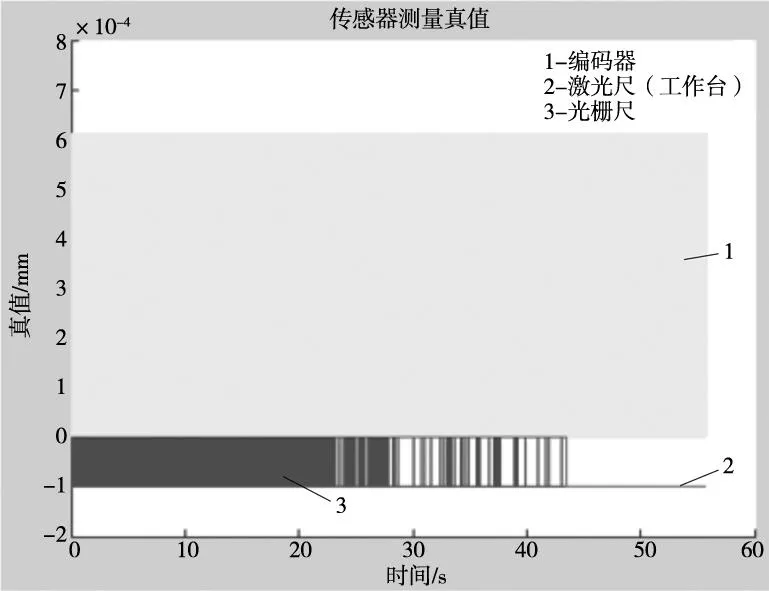
图6 去掉三脚架上的激光尺后的振幅
2.3.2重锤敲击工作台震动
用重锤多次敲击工作台上的不同的位置,得到三类传感器采集到工作台的振幅,如图7所示。三角架上安装的激光尺采集到的工作台震动幅值较大,可达70μm。为了更清楚的显示编码器、光栅尺和工作台上安装的激光尺采集到的振幅数据,把三脚架上安装的激光尺采集的数据屏蔽掉,重新作图,如图8所示。在图8中,光栅尺、编码器和工作台上安装的激光尺检测到工作台的振幅较小(<1μm)。产生此结果的原因是:重锤敲击工作台,会使得整个机床产生震动;由于编码器、光栅尺和安装在工作台上的激光尺三者的测量元件和对应的反射元件都随机床同步振动,所以相对振幅较小,检测的数据也较小。但此时地面上的三脚架不动,安装在三脚架顶部的激光尺发射器没有震动,所以机床上安装的反射镜和三脚架上的激光尺反射镜有相对振动,幅值达到70μm。同样,用同样的力度敲击工作台的不同方位,在沿激光尺测量方向上敲击时,产生的幅值最大,在竖直方向和垂直于测量方向敲击时幅值相对较小。
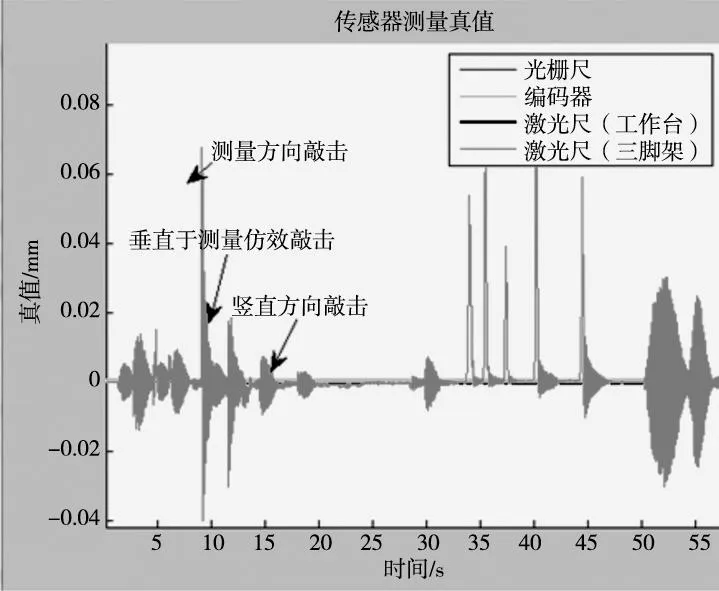
图7 重锤敲击工作台时采集到的振幅
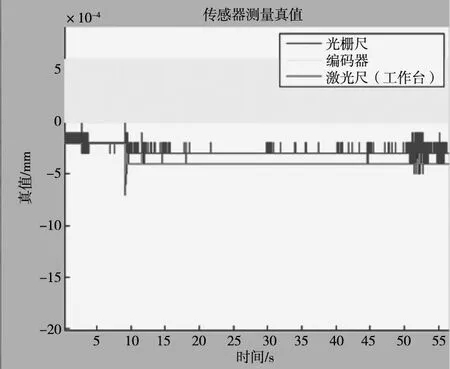
图8 去掉三脚架上的激光尺后的振幅
2.3.3开闭实验室门的影响
为探究实验室门开闭引起的空气流动是否对本装置造成影响和影响的程度,在保持工作台静止的情况下,以一定速度关闭实验室门,将各类传感器同时采集的数据进行分析。各类传感器采集的工作台的振幅,如图9所示。
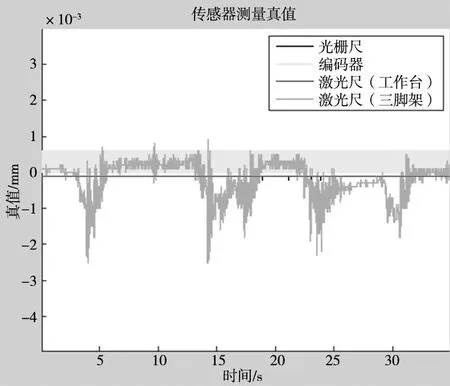
图9 关门引起的工作台响应
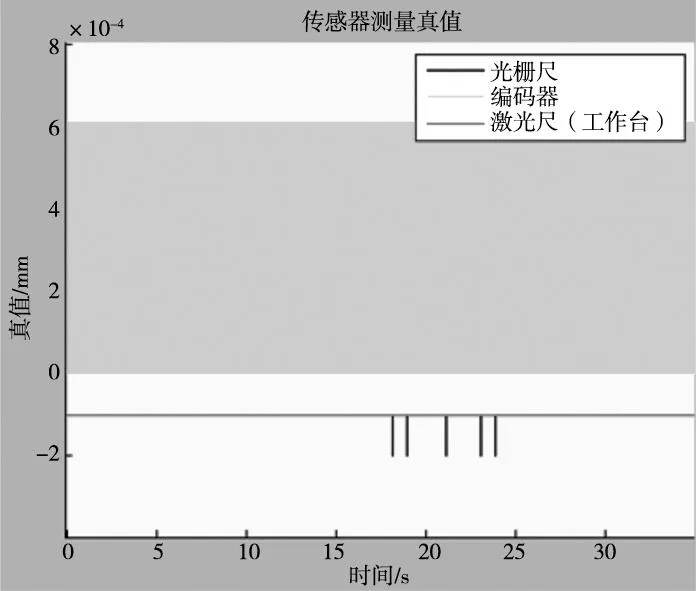
图10 去掉三脚架上的激光尺后的振幅
在图9中,三角架上的激光尺采集到的工作台震动幅值相对比较大,大约2.5μm;其他三者采集的数据较小。为更清楚显示编码器、光栅尺和工作台上的激光尺采集的数据,把三脚架上的激光尺采集的数据屏蔽掉,重新作图,如图10所示。在图10中,实验室门开闭引发的实验室整体震动对编码器、光栅尺和安装在工作台上的激光尺影响不大,振幅<0.6μm。产生上述结果的原因是:实验室门开闭引发的实验室整体震动使三脚架上安装的激光尺产生振幅为2.5μm的振动;但由于试验台的质量较大,关门对其影响很小,测得的振幅较小。
综上所述,由于三脚架上的安装装置质量和刚度都较小,在进行高精度测量时,易受到外界干扰。振动对安装在三脚架上的激光尺影响较大,对安装在工作台上的激光尺影响较小。建议采用两种改进方案:借助于工作台的稳定性,把激光尺固定在工作台上;信号采集后,针对三脚架的振动频率对信号进行滤波处理。
2.4实验改进
2.4.1数据滤波
在重锤敲击地面试验中,将三脚架上的激光尺采集到的数据利用五点滤波法进行滤波处理。同时做出编码器、光栅尺,工作台上的激光尺和三脚架上激光尺滤波后数据的幅值,如图11所示。把三脚架上安装的激光尺采集到的数据进行屏蔽,重新作图,如图12所示。由图11可见三脚架上激光尺采集到的工作台震动幅值依然可达到6μm,滤波后的数据与滤波前数据相比没有太大的改善,说明滤波处理不能有效解决地面震动导致三脚架采集数据不稳定的问题。
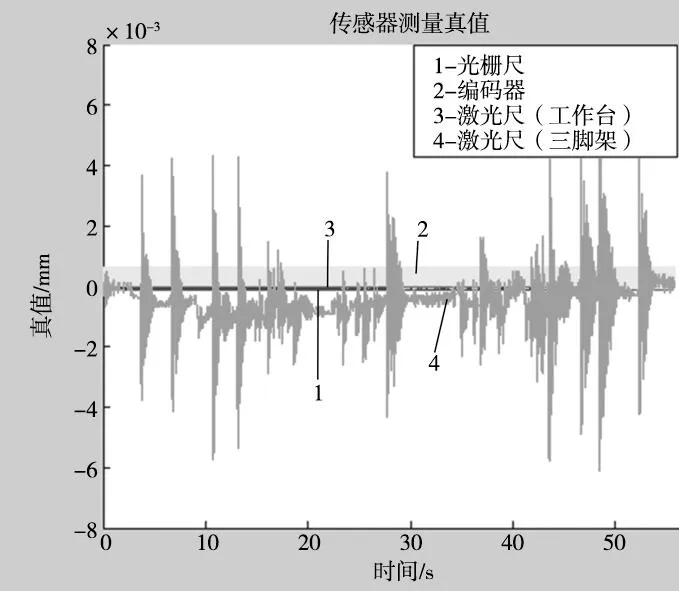
图11 滤波后重锤敲击地面产生的振幅
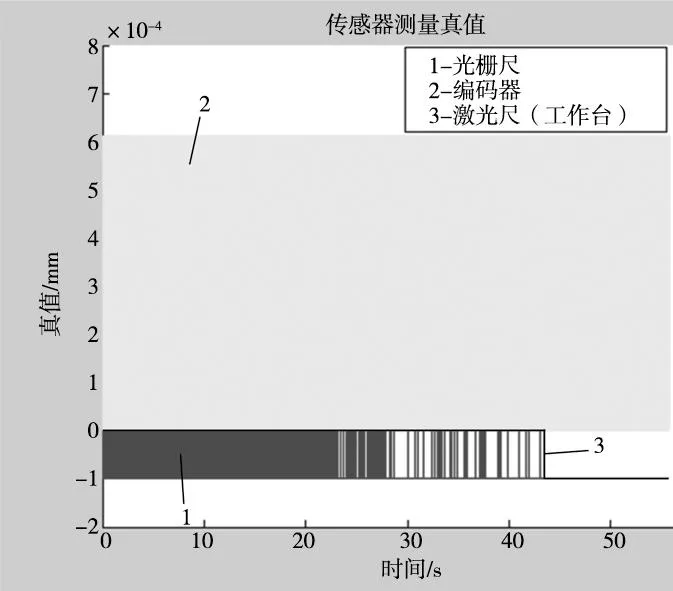
图12 去掉三脚架上的激光尺后的振幅
2.4.2两激光尺同时固定在工作台
保持两个激光反射镜和X轴导轨上固定的激光发射器安装位置不变,把三脚架上的激光发射器用磁座固定在工作台上,调整光路,重复重锤敲击地面试验。三类传感器采集到工作台的振幅数据,如图13所示。把磁座固定在工作台上的激光尺采集到的数据进行屏蔽,重新作图,如图14所示。由图14可见,用磁座固定在工作台上的激光尺采集到的震动幅值仅为1.2μm。与改进前测量的6μm的震动幅值相比有很大的改善。
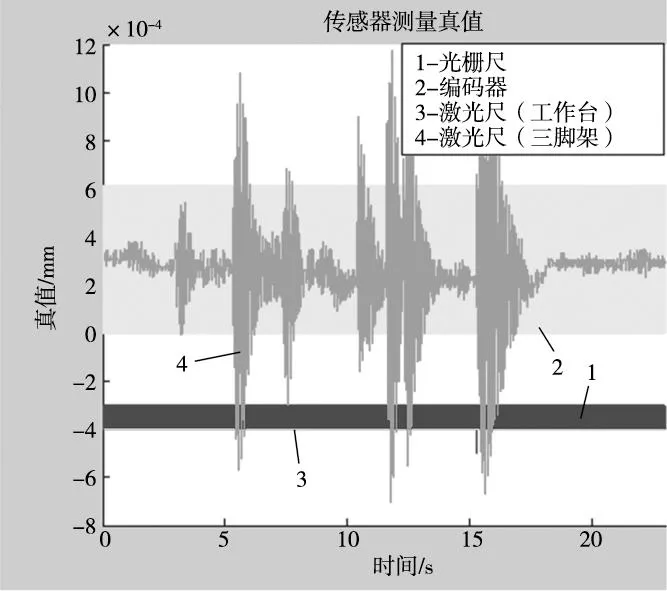
图13 改进试验后重锤敲击地面产生的振幅
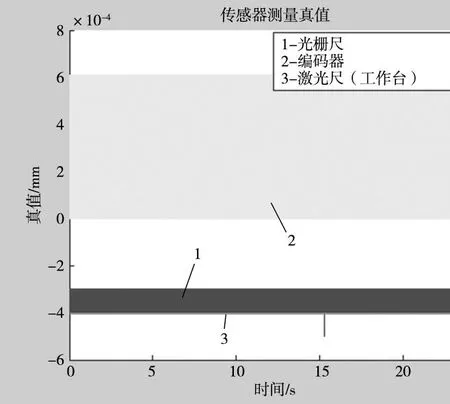
图14 去掉三脚架上的激光尺后的振幅
以上两组改进实验说明借助于工作台的稳定性,把两个激光尺都固定在工作台上可以有效地减小外界环境的震动对激光尺测量精度的影响。
2.5圆运动精度影响因素分析实验
由于圆运动需要两轴联动实现,利用激光尺测量,在不同速度和直径下,机床圆运动的精度变化,分析机床的圆精度与运行速度、直径的关系,验证激光尺的精确性以及测试装置的实用性。
2.5.1速度因素测试
保持机床圆运动的直径D=20mm,分别以速度f(2mm/s,5mm/s,10mm/s)做圆运动,利用激光尺测机床圆运动的精度,如图15a、15b、15c所示。可见,机床圆运动在0°,90°,180°,270°时出现尖峰,是由于机床的每一根轴在反向运动时的反向间隙造成的。激光尺检测结果表明,机床圆运动的精度随着运动速度增大而增大。
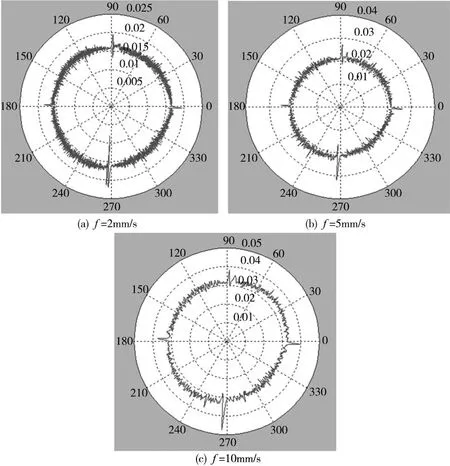
图15 不同速度下机床的圆运动精度
2.5.2直径因素测试
保持机床运动速度f=10mm/s,分别使机床以直径D(20mm,50mm,80mm)进行圆运动,测机床圆运动精度,如图16a、16b、16c所示。可见,在机床圆运动速度不变的情况下,激光尺测得机床圆运动精度随着直径的增大而增大。
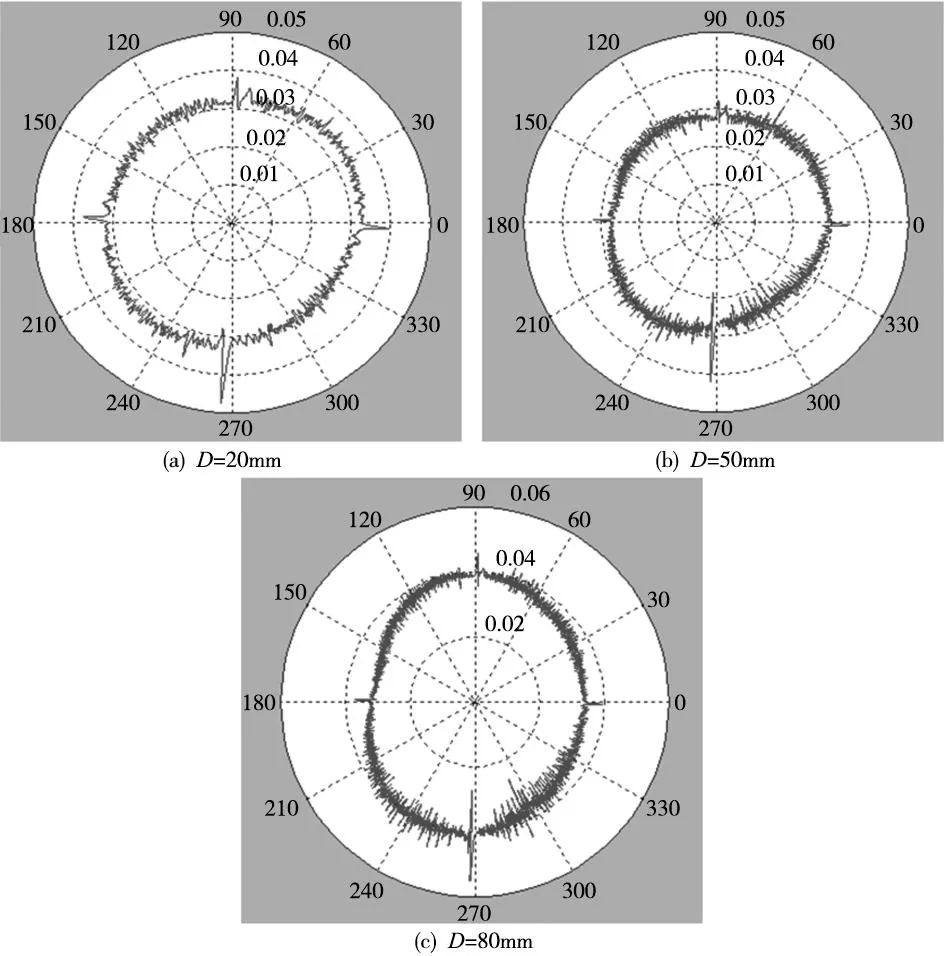
图16 不同直径下机床圆运动的精度图
综合两组实验结果,激光尺测试装置能精确的检测出,机床的圆运动的误差值以及精度随运动直径、速度的变化趋势,验证了激光尺检测的精确性以及测试装置的实用性。
3结论
本文阐述了激光尺的安装和光路的调整方法。用两个激光尺对机床沿X轴运行进行了对比检测,发现激光尺检测的不足。利用重锤敲击地面、工作台和关门来模拟实际试验的外界干扰源,研究外界干扰对激光尺检测精度的影响。通过两组改进的实验方案,有效提高激光尺的检测精度。利用激光尺检测装置对机床的圆运动精度进行测量,验证了激光尺对数控机床精度检测的精确性和实用性。
[参考文献]
[1] 潘青友. LOS激光尺位置反馈技术及其应用[J]. 制造技术与机床,2008(11): 130-132.
[2] 李鑫, 杨开明, 朱煜,等. 平面电机自适应加速度前馈运动控制[J]. 电机与控制学报, 2012,16(9): 95-102.
[3] Hiroaki Iwai, Kimiyuki Mitsui. Development of a measuring method for motion accuracy of NC machine tools using links and rotary encoders[J]. International Journal of Machine Tools & Manufacture, 2009, 49: 99-108.
[4] 王金宝, 朱善安, 林 峰. 目标识别在激光水平尺光点精度检测中的应用[J]. 机电工程, 2006, 23(12): 46-48.
[5] 李立艳, 王坚, 韩春阳, 等. 用于纳米测量的集成化单频激光干涉仪[J]. 中国激光, 2011,38(4): 0408001-1-6.
[6] Wenhua Du, Shulian Zhang, Yan Li. Principles and realization of a novel instrument for high performance displacement measurement-nanometer laser ruler [J]. Optics and Lasers in Engineering, 2005, 43: 1214-1225.
(编辑赵蓉)
申请优先审稿须知
为振兴我国机械装备制造业,弘扬民族科学文化精神,提升期刊质量,本刊从即日起,凡是符合本刊报道范围且同时受到“国家863计划资助项目”、“国家自然科学基金资助项目”、“国家重点科技攻关资助项目”等国家级基金资助项目的原创论文,可申请优先审稿,一经录用,优先发表,欢迎业内人事、专家、学者踊跃投稿(来稿注明:“优先审稿”字样)。
注:1.本刊正常审稿时间一般为一个月,优先审稿时间为15-20天;
2.本刊正常发表文章周期为采用后7-10个月,优先发表文章周期为7-9个月。
——本刊编辑部
Research on Testing System of Machine Tool Dynamic Characteristics Based on Laser Ruler
JIANG Ge-dong1,DOU Cheng-dong1,CHEN Jiang2
(1.Equipment Intelligent Diagnosis and Control Research Institute, Xi′an Jiao Tong University, Xi′an 710048, China;2.Key Laboratory of Road Working Technique and Equipment, Ministry of Education, Chang′an University, Xi′an 710064, China)
Abstract:Laser ruler is a sensor with high measuring accuracy and can be arranged in work holding device to implement dynamic measuring machine tool. The overall objective of this study is discussing some properties of laser measuring device by some experiments. The test experiments which were used consisted of analyzing laser ruler′s measuring accuracy -related factors and testing dynamic characteristics of CNC machine feed unit. From experiments, some existing problems are found in the application of measurement device based on laser ruler and solved by the further experiment. The results of experiment indicate that measurement device based on laser ruler is more precise and practical.
Key words:laser ruler; dynamic testing; machine tool; feed unit
中图分类号:TH166;TG659
文献标识码:A
作者简介:姜歌东(1970—),女,陕西咸阳人,西安交通大学教授、博士研究生导师,研究方向为数字控制和制造技术,精密机械及测量技术,机电系统动力学研究;通讯作者:窦成东(1989—),男,山东临沂人,西安交通大学硕士研究生,研究方向为数控机床动态特性检测, (E-mail)douchengdong@126.com。
*基金项目:“高档数控机床与基础制造装备”科技重大专项“开放式高档数控系统、伺服装置和电机成套产品开发与综合验证(2012ZX04001-012-04)
收稿日期:2015-02-14
文章编号:1001-2265(2015)12-0065-05
DOI:10.13462/j.cnki.mmtamt.2015.12.018