装备体系多阶段任务可靠性高效解析算法
2016-01-21钟季龙郭基联王卓健
钟季龙, 郭基联, 王卓健, 邵 帅
(空军工程大学航空航天工程学院, 陕西 西安 710038)
装备体系多阶段任务可靠性高效解析算法
钟季龙, 郭基联, 王卓健, 邵帅
(空军工程大学航空航天工程学院, 陕西 西安 710038)
摘要:体系作战任务可靠性的实时评估是未来作战的必然要求。为了实时计算装备体系多阶段任务可靠性,基于k/n(G)表决模型,设计了一种考虑冗余的可靠度高效解析算法。在体系结构分析及任务概述基础上,建立了冗余故障树以及由冗余故障树转化的二元决策图(binary decision diagram,BDD)模型。针对传统可靠性解析计算算法复杂度高的问题,本文利用递归算法改进了k/n(G)表决模型的计算过程,提高了计算效率。以航空装备体系远程目标打击任务为例,数值计算表明,本文的改进解析算法有效得出了体系多阶段任务可靠度计算结果,且相比传统算法运算效率得到显著提高,有利于应用到体系作战任务可靠度实时计算评估,指导任务统筹和规划。
关键词:多阶段任务系统; 装备体系; k/n(G)模型; 高效解析算法
0引言
近年来,多场现代局部战争诸如科索沃战争、海湾战争、伊拉克战争等表明,随着计算机和网络技术的不断发展,现代战争已不再是单个武器装备之间的较量,体系与体系之间的对抗特征愈发明显。因此,现代战争是面向一体化、并行化和复杂化的装备体系联合作战,作战行动凸显出高精度、高强度、高速度的特点,同时也呈现出非线性、非接触式的作战样式。研究作战行动中的装备体系具有重要的现实意义。
体系作战一般是由不同阶段多个子任务驱动进行的作战任务,每个阶段子任务紧密关联,相互耦合,其可靠性关系到整个作战是否成功。体系多阶段任务可靠性的内涵不仅是装备单元本身的可靠性,还包括在规定的条件和规定的时间内,完成规定功能的能力即任务的完成概率[1]。对于多阶段任务(phased mission system, PMS)可靠性求解建模,国内外大量文献研究成果表明,从最初的静态模型,如静态故障树(fault tree, FT)[2]、二元决策图(binary decision diagrams, BDD)[3-4],到动态故障树模型(dynamic fault tree, DFT)[5-6]、Agent模型[7]、马尔可夫模型(continuous-time Markov chain, CTMC)[8-9]、随机Petri网模型(stochastic Petri net, SPN)[10-11],其建模能力越来越强,建模技术越来越复杂,应用范围也越来越广泛。但以上多数研究是针对单个装备或部件系统,未考虑装备体系整体的多阶段任务作战的可靠性。从这一点看,文献[3]针对多阶段任务系统采用分离BDD方法对多阶段任务系统进行可靠性分析,实现了模块化模型和简化运算的目的,但没有考虑体系的冗余结构。由于装备体系具有冗余结构且装备类型复杂,因此需要建立新的模型以准确对体系进行描述。马尔可夫模型针对单个装备或数量规模较小系统,其建模具有明显优势。应用到体系作战中,随着规模扩大,Markov过程状态数呈现指数增加,导致状态空间爆炸问题(NP问题)[12]。对此,为了解决上述问题,由文献[4]提出的基于多阶段任务系统的二元决策图(PMS-BDD),采用阶段代数给出了算法复杂度和空间存储度均较低的算法,解决了计算量和存储量两方面的问题,但是仍未考虑冗余结构。目前国外研究装备体系任务可靠性问题,通常采用大型建模仿真技术,将各类型装备的结构可靠性、维修性纳入作战仿真进行建模评价。具有代表性的是美军联合作战仿真系统(joint warfare system, JWARS)[13]该模型提供层次化体系结构,模块化的结构使其具有良好功能扩展性和仿真计算能力。然而大型仿同样存在建模复杂、时间和人力资源消耗大的问题。
本文以航空装备体系为研究对象,考虑更为一般的情况,即执行体系任务时大量装备具备冗余结构,在多阶段任务的PMS-BDD基础上,设计任务可靠度解析算法。信息化战争对作战评估要求反应迅速,甚至实时性。例如,执行防空反导任务时,探测和拦截导弹的窗口时间短精度高,必须严格遵照“高、精、准”的时空要求进行任务评估及整体规划过程。由于本文引入冗余结构,大大增加了PMS可靠性计算复杂度,不利于作战评估的实时计算分析。因此重点针对大型装备体系多阶段任务可靠性计算效率低的问题,在传统k/n(G)表决模型基础上提出一种改进解析算法模型,有效提高可靠性求解效率,力求在占用有限资源情况下以最少时间完成可靠性的实时评估计算,为装备及任务的调整提供理论和数据支撑。
1体系组成结构及任务概述
航空装备体系结构建模,是基于体系层次性、涌现性和相互联系性的特点基础上进行的体系结构关系分析。与装备系统相比,航空装备体系是一个更为复杂的装备系统,其完成的功能往往不是多种装备的简单叠加,其规模也不仅是系统各个组成要素的叠加。应考虑到装备体系内部各装备节点连接路径以及它们之间的连接关系,文献[14-15]有详细分析,本文概述从略。
依据航空装备体系的使命、任务、目标、环境等属性,用层次化的描述方法将体系划分为体系层、系统层、平台层和单元层4个层级。各个层级的含义如表1所示。

表1 体系层级含义
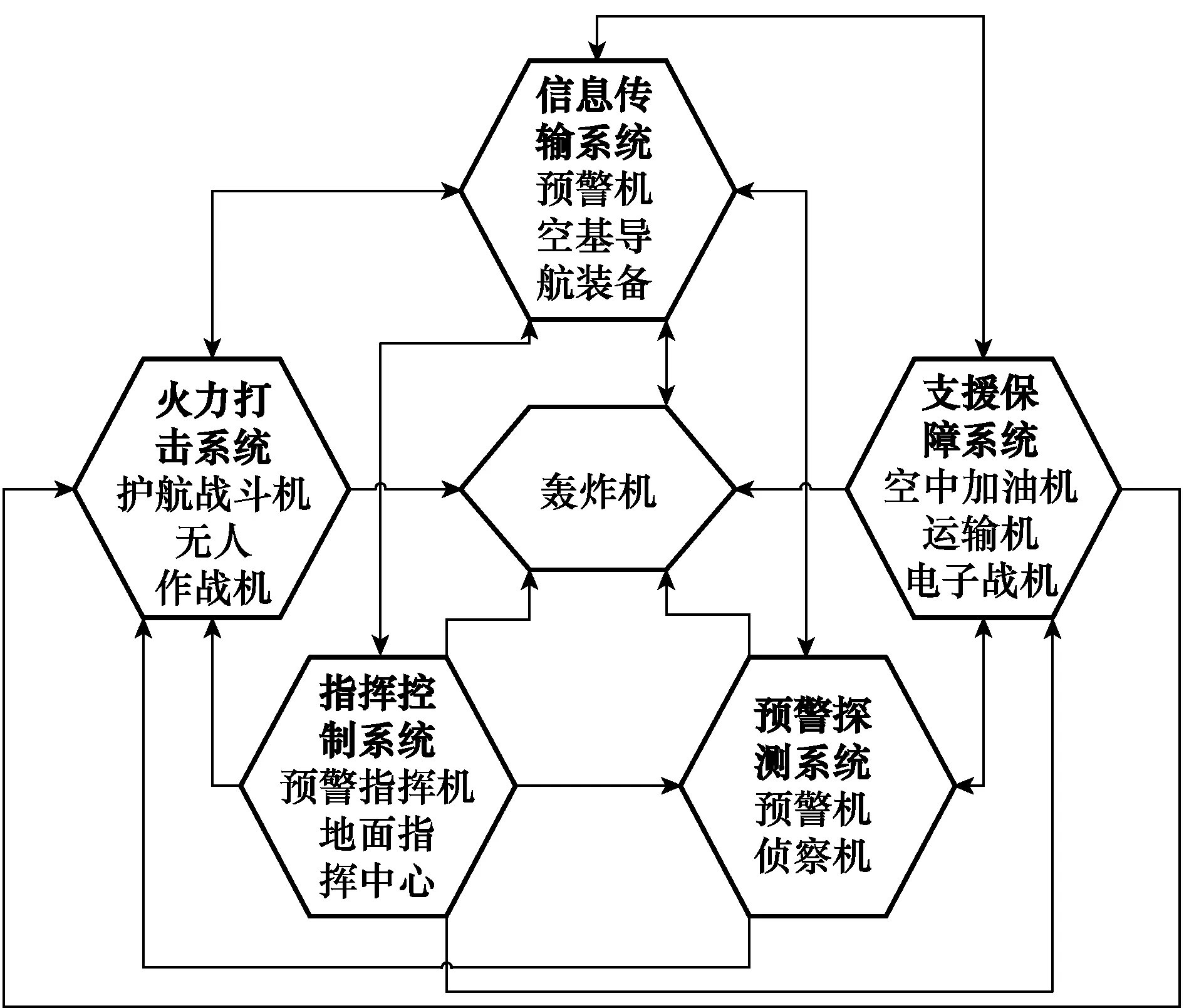
由此,航空装备体系是由不同装备系统交联构成,其结构关系主要体现在各类装备系统间的指挥控制和信息交互关系。根据体系装备的功能,可以将体系划分为预警探测系统、指挥控制系统、火力打击系统、支援保障系统以及信息传输系统。各类装备系统包括的典型装备如表2所示。

表2 系统层典型装备
航空装备体系任务依赖于各装备系统所组成的体系结构。体系任务与系统任务相比,体系任务更加复杂庞大,既包含了系统任务,又不等同于系统任务的叠加。图1是体系任务根据阶段划分到具体执行装备单元的任务建模方案示意图。从图1可知,体系任务是一个由不同阶段分任务构成的多阶段任务。由于每个阶段内装备之间以及阶段任务之间相互耦合,形成任务之间的单向或双向信息流动,构成任务的耦合集,因此任务的这种关联性造成任务建模分析的复杂性。文献[16]等对串行、并行和耦合任务的建模有较为详细的建模分析,本文不重复概述。由于冗余结构的引入,导致体系任务变得更为复杂,影响了可靠性计算效率,因此下面主要分析可靠性解析计算模型,就设计更高效率的算法给出新的思路。

图1 任务建模方案示意图
2冗余PMS可靠性建模
为了研究体系多阶段任务可靠性,本文以多阶段任务为驱动,建立可靠度计算解析模型。本文在引言指出,体系多阶段任务可靠性是指相互独立而又相互协作的各种武器装备系统组成的复杂系统集合,在规定的条件和规定的各阶段时间内,完成规定功能的能力。因此,研究体系多阶段任务可靠性不能脱离任务,必须在具体任务想定上进行可靠性建模分析。
2.1冗余故障树建模
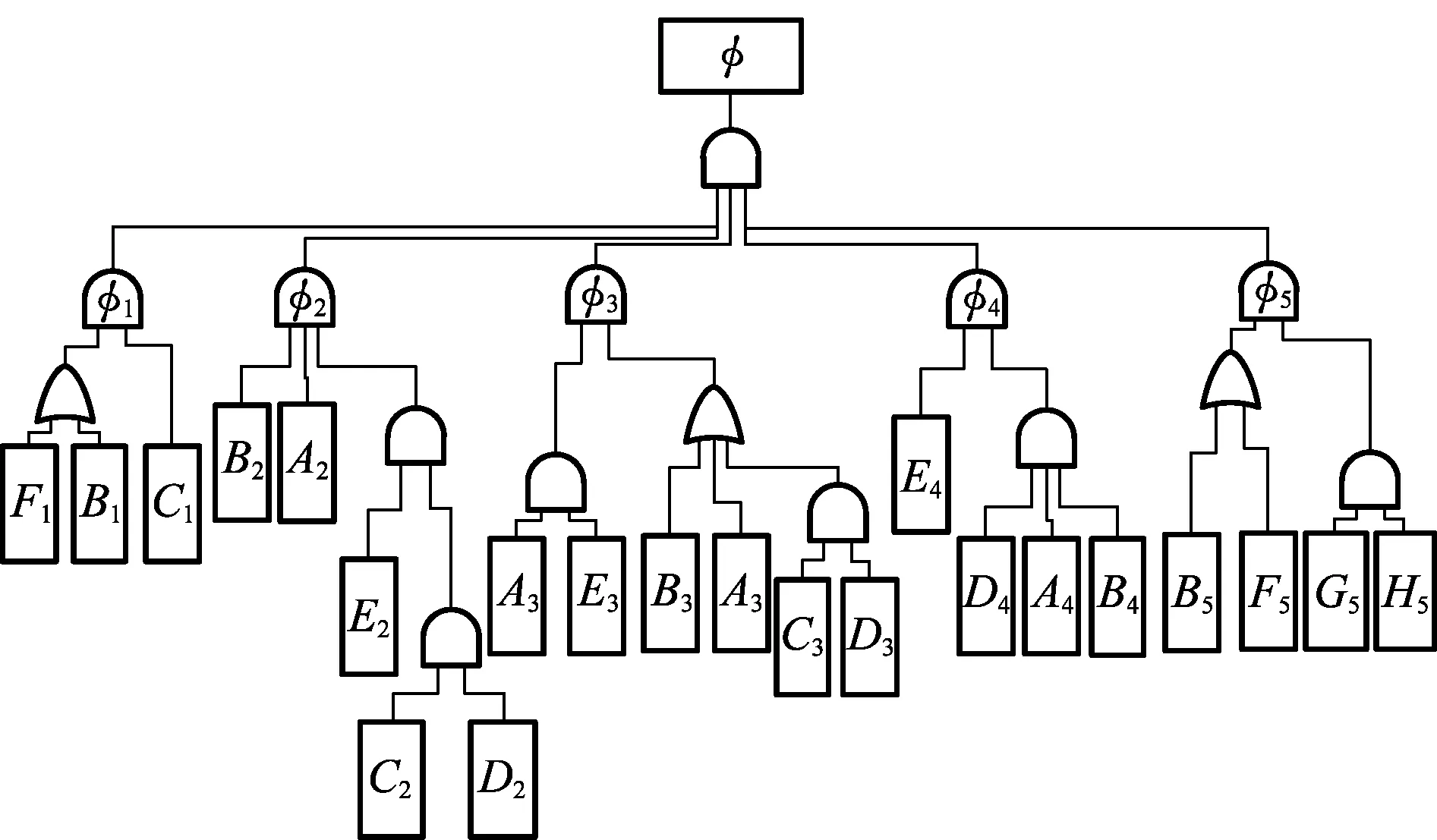
冗余故障树模型是可靠性分析的有力工具。体系任务可靠性分析的第一步是建立PMS冗余故障树模型,以寻求影响任务执行的关键模块,为进一步转化为冗余BDD模型提供依据。对于多阶段任务的体系,一般是由多个连续任务阶段构成。每个阶段的成功都有不同的需求并且任一阶段的失效都会导致任务的失效。对于装备间的依赖性通过冗余模块的逻辑门关系进行描述。阶段间的任务依赖性将在下一步冗余BDD模型中处理。冗余故障树模型以“体系任务失效”事件作为顶事件,每个阶段任务构成一个“与门”关系,模块之间构成“与门”、“或门”关系,依次建立如图2所示的一种倒立分解到各阶段任务所需装备单元冗余模块的逻辑关系图。其中A1、A2、B1、B2都表示装备冗余模块,即同一类型的装备冗余结构模块,下标表示不同阶段。φ表示体系多任务的结构函数,φi表示第i个阶段的结构函数。

图2 PMS冗余故障树示意图
2.2冗余故障树转化的BDD模型
在文献[17]的研究基础上进一步建立PMS冗余故障树模型。将故障树转化到BDD图,其基本思想采用由文献[18]提出的递归方法,目的是通过转化减少故障树中间事件的处理,可以直接利用BDD的布尔函数进行故障树定量分析,得到任务不相交路径的概率和,简化计算提高效率。同时,冗余BDD的提出使得各统计独立的装备单元实现了“打包”处理,这样不仅简化了模型,而且提高了计算的效率。
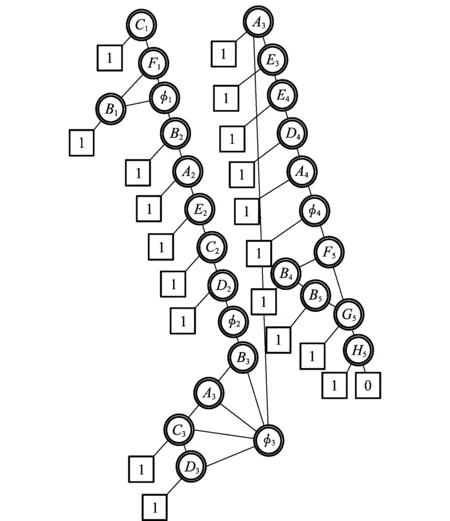
由图3转化得到的PMS冗余BDD模型如图4所示。每个圈代表一个冗余装备模块,“0”、“1”分别代表成功和失效。由PMS-BDD图可以找出每条由根节点出发,通向终结点“0”的所有不相交路径。根据阶段依赖性的逻辑关系,必须剔除部分不合逻辑的路径,例如模块A在第一阶段失效,在不可修假设下后面所有阶段的A模块均是不可能再次参与任务的,因此删除后续含有A模块的路径。最后对删减后的不相交路径进行下一步的概率求和。

图3 PMS冗余BDD模型示意图
2.3冗余PMS可靠度解析算法
上面提到的PMS-BDD图的所有不相交路径,为进一步分析体系任务可靠度提供计算基础。针对装备体系,这一部分计算效率低下正是导致可靠性解析求解效率低,无法实时快速得到结果的原因。因此,必须提出新的思想改进传统算法,建立高效算法以加快计算速度,得到实时快速准确的评估计算结果。下面在前两步分析基础上,对传统算法和改进算法进行具体分析。
2.3.1传统解析算法
设装备单元故障率函数为λ(t),可靠度R(t),则由故障率与可靠度关系可知
(1)
k/n(G)表决模型可以表征体系各装备单元的不同结构。当k=1时,系统为并联结构;k=n时系统为串联结构。多数时候装备体系是串联、并联或混联结构,因此可以利用k/n(G)表决模型计算具备冗余的可靠度。
R(t)计算公式:
(2)
由于传统算法在计算中,不可避免进行了大量阶乘和组合运算,导致计算量极具增加。通过分析式(2)可知,传统解析算法的时间复杂度为O(n·n!)。
2.3.2高效改进算法
对于航空装备体系,由于其复杂性和分布类的多样性等因素,通常其规模都较单个装备系统庞大,采用传统算法往往效率低下。针对一般性多阶段任务系统可靠性(generalized multi-state systems, GMSS)的失效评估,文献[19-21]提出了高效稳健算法思想,然而并没有考虑具备冗余结构的可靠性失效评估。本文根据多阶段任务体系各阶段间的马尔可夫性质,结合递归方法,针对具备冗余结构的体系设计了一套针对提高PMS可靠度仿真计算效率的改进算法。
由体系结构可知,体系由装备系统组成,系统又是不同平台的组合,平台以下是各具体装备单元组成。现以一种平台为例加以说明,假设一种装备平台下有n个相同的装备单元,每个单元可靠度为p(t)=e-∫t0λ(t)dt,q(t)=1-p(t)。若第j阶段至少kj个单元不发生重大故障,则装备平台正常执行j阶段任务,也即若第j阶段至少有mj=n-kj+1个装备单元发生失效,则该装备平台在j阶段退出任务。令xj为j阶段(含)以前该装备平台的失效单元总数。显然,若xj (3) 令Xj,i为xj=i,且对所有l (4) 对于某一装备平台xj值序列,序列具有马尔可夫性质,即xj只与xj-1相关,与j-1之前状态无关[22]。因此,由条件概率公式可得 (5) 式中 (6) (7) 结合递归算法可以减少存储量,降低算法空间复杂度,提高运算效率的思想,式(4)按照下列关系计算: (8) (9) (10) 由此可以得到在多阶段任务中,一个装备平台在j阶段的可靠度为 (11) 通过上述冗余BDD得到的布尔形式的结构函数,可求得所有不相交路径下装备系统及体系的可靠性。 综上分析,设计算法避免了复杂的阶乘运算,将组合问题通过递归有效解决了,可以分析得到改进算法的时间复杂度为O(2k2),相比之下改进算法时间复杂度远低于传统解析算法,因此在可靠度解析计算中可以实现更快甚至实时的分析。 下面以一个案例研究来表明高效算法取得的效果。 3体系作战案例分析 以航空装备体系远程目标打击任务为想定案例,研究装备体系在具体任务中的可靠性。实施作战的航空装备体系包括远程轰炸机、护航战斗机、空中加油机、电子战飞机、预警机、无人机以及卫星雷达等作战装备。具体见体系结构及相关关系如图4所示(相关型号暂不讨论)。 图4 体系结构及关系 具体任务想定假设为反制敌军远程目标,我方采用一体化联合火力实施远程打击,动用远程轰炸机和战斗机突击编队对敌军指挥控制与通信中心进行攻击,威慑敌防空系统和地面基地,遂行反航空兵作战保持空中优势,远程联合攻击敌后勤基地及第二梯队,破击敌军地面及空中作战体系,遂行空中侦察监视等任务,达到迫使敌军终止军事干涉的目的。打击目标主要分为两类:一是敌远程预警体系关键节点;二是打击敌远程力量投送平台,主要包括地面机场、基地以及航母编队。 由此初步建立体系任务序列如图5所示。此任务序列并非代表最终作战执行序列,实际作战须根据评估结果实时调整规划任务执行顺序。 第一阶段利用图像侦察机和无人侦察飞机获取目标图像、位置及周边态势,为目标选择和巡航导弹任务规划提供情报,获取敌方防空系统部署及性能情报。同时,加油机对其他飞机进行油料保障。 第二阶段任务分两步同时进行。空中突防:预警机在指挥所引导下先行升空,在轰炸机空防空域附近进行空中预警监视和构建空中指挥平台;电子战飞机对敌防空系统实施电磁压制和反辐射打击,对敌方拦截飞机火控雷达进行压制,缩短其探测距离;制空作战飞机在预警机的协同下严密监视空中敌情,若遇敌机拦截,迅速占据有利态势击退或消灭敌机,保障轰炸机安全突防。进攻性反航空兵作战:目的是夺取空中优势,采取混合突击机群编队飞行。首先出动侦察编队进入指定位置,进行空中监视。其次电子战飞机采取欺骗和摧毁相结合的方式进行地面干扰破坏。最后突击编队在战斗机编队掩护下,对敌地面目标发起攻击。 图5 体系任务序列示意图 第三阶段轰炸机在成功突防后,在指挥所和机载导航系统引导下,向武器投放空域机动。同时侦察机、预警指挥机、电子战飞机及战斗机组成的混合编队遂行压制敌防空体系的任务。 第四阶段,远程轰炸机执行轰炸敌方地面目标及航母编队,破击敌地面海上作战体系。同时遂行敌纵深空中遮断,以达到阻止敌向前机动,孤立战场的目的。 最后第五阶段巡航导弹发射后,利用无人侦察机和图像侦察卫星对打击效果进行评估。如果达到预期效果,轰炸机在指挥所引导下返航。同时在返航时,加油机、运输机等保障飞机对作战飞机进行后勤保障,确保作战飞机顺利返航。 参考近年来多场局部战争战例以及相关演习资料,可以确定如表3所示的各型装备在不同阶段完成任务最低所需架次、最大出动架次以及装备单元任务的平均严重故障时间间隔(mission time between critical failure, MTBCF)。各阶段具体任务持续时间相对固定,根据不同任务要求给定各阶段可靠度的下限阈值,如表4所示。仿真过程中对不同阶段不同类型装备冗余数进行规定范围内的随机取值,在完成任务最低所需出动量基础上,仿真得到以各阶段可靠度阈值为约束的装备冗余量,根据仿真结果可评估得到装备在不同阶段的作战装备需求。 表3 航空装备MTBCF及各阶段出动架次范围1) 注1):数字/数字表示:完成任务最低所需架次/最大出动架次。 首先根据体系的任务序列,可以建立如图6所示的冗余故障树模型,进一步由故障树模型转化成的冗余BDD模型如图7所示。其中各装备单元以代号表示。A表示预警机,B表示侦察机,C表示电子战飞机,D表示战斗机,E表示轰炸机,F表示无人机,G表示加油机,H表示运输机。下标表示时间阶段。 图6 体系任务故障树 根据阶段间依赖逻辑,删减得到两条符合要求的BDD模型不相交路径概率: P1=C1F1B2A2E2C2D2B3A3E3E4D4A4F5G5H5 (12) (13) 参考文献针对可靠度计算,上述高效改进算法不受参数的分布限制,[23]指出作战体系中各装备单元整体看待时,严重故障导致的任务失效率可看作服从指数分布。本文通过MATLAB进行可靠度仿真。仿真硬件设备采用Intel Pentium®处理器,CPU 2.89 GHz,内存3.4 G计算机。可以得到各阶段装备冗余需求仿真结果如表5所示。表5表示了完成任务最低所需架次基础上,各型装备冗余量需求结果。图8是各阶段任务可靠度解析计算随时间变化结果图。通过仿真计算,传统算法平均每次仿真耗时905.3 s,而高效改进算法平均每次仿真耗时仅为5.6 s。进一步在不同体系规模,不同仿真次数下,对比不同算法仿真时间如图9所示(为更清楚观察对比两种算法结果,图9(a)采用仿真次数和仿真时间双对数坐标,图9(b)采用仿真时间半对数坐标)。 图7 体系任务BDD模型 图8 多阶段任务可靠度解析计算结果 航空装备阶段1阶段2阶段3阶段4阶段5预警机016/224/324/316/2侦察机8/216/216/216/28/1电子战机16/316/316/300战斗机0130/10180/1090/50轰炸机070/6100/1060/50无人机55/300055/3加油机25/200025/2运输机25/225/20025/2 注1):数字/数字表示:完成任务最低所需架次/冗余量。 可以发现不同算法下的可靠度计算所耗时间差异明显,具体分析如下: (1) 仿真结果表明,高效改进算法的运行时间远小于传统算法,1 000次以内的仿真,传统算法接近106s数量级,而高效算法运行时间不大于103s数量级(见图9(b)); (2) 从图9(a)的仿真结果对比可以看出,随着体系规模的扩大,传统算法和高效算法仿真时间均呈增加趋势。对于传统算法,由于其组合和阶乘运算导致算法耗时随规模扩大急剧增加,而改进算法耗时增加相对缓慢; (3) 由图9(b)看出,随着仿真次数的增加,仿真迭代时间呈增加趋势。同时不难发现,仿真次数大于一定范围后,随着次数增加,仿真迭代时间增加变缓,算法收敛速度变快。说明仿真次数大于一定范围后,所提高效算法所耗时间对次数增加不敏感。 图9 不同算法仿真时间对比 4结束语 本文通过分析航空装备体系结构组成,开展了装备体系多阶段任务可靠性解析算法研究。设计了效率突出的高效改进算法,本文工作总结如下: (1) 设计了一套基于k/n(G)模型的高效改进算法,应用递归思想解决了传统算法在大规模体系任务可靠度计算中出现的计算量指数增长而导致计算效率较低的问题,从而对作战体系快速、实时评估和规划具有重要军事意义; (2) 以航空装备体系远程目标打击体系多阶段任务可靠度求解为例进行研究,给出了详细的仿真案例分析,结果表明将改进算法应用到仿真评估中是可行的。 [1] Jiang S W,Lv W M,Feng H Y.Reliability modeling and simulation of equipment system-of-systems based on timing Petri net[J].SystemsEngineeringandElectronics,2013,35(4):895-899.(江式伟, 吕卫民, 冯浩源. 基于时间petri网的装备体系可靠性建模与仿真[J]. 系统工程与电子技术, 2013, 35(4):895-899.) [2] Zhai Y Y,Zhou Y W,Liang X M.A design and implementation of fault diagnosis system in automatic test equipment[J].JournalofAirForceEngineeringUniversity(NaturalScienceEdition.)(翟颖烨, 周越文, 梁学明,等. ATE中的故障诊断系统设计与实现[J]. 空军工程大学学报(自然版), 2014, 15(1):24-28.) [3] Chen G Y,Zhang X M,Tang X W.Analysis of generalized phased-mission systems reliability based on separable binary decision diagram[J].SystemsEngineering-Theory&Practice,2013,33(5):1240-1246.(陈光宇,张小民,唐小我.基于分离BDD的通用多阶段任务系统可靠性分析[J].系统工程理论与实践,2013,33(5):1240-1246.) [4] Zang X, Hairong S, Trivedi K S. A BDD-based algorithm for reliability analysis of phased-mission[J].IEEETrans.onReliability, 1999, 48(1):50-60. [5] Mo Y C.A multiple-valued decision-diagram-based approach to solve dynamic fault tree[J].IEEETrans.onReliability,2014,63(1):81-93. [6] Manno G, Chiacchio F, Compagno L, et al. Conception of repairable dynamic fault trees and resolution by the use of raatss, a matlab toolbox based on the ats formalism[J].ReliabilityEngineeringandSystemSafety, 2014, 121:250-262. [7] Li J,Zhong Z N,Jing N,et al.Space-air resources multi-phase cooperation task planning approach based on heterogeneous MAS model[J].ActaAeronauticaetAstronauticaSinica,2013,34(7):1682-1697.(李军,钟志农,景宁,等.异构MAS结构下的空天资源多阶段协同任务规划方法[J].航空学报,2013,34(7):1682-1697.) [8] Yang C H, Yang J J, Bian J L. The PMS modeling method based on interactive Markov chain[C]∥Proc.oftheInternationalConferenceonReliability,MaintainabilityandSafety, 2011:349-352. [9] Ji M L, Xiao Y W. Reliability evaluation of generalized phased-mission systems with repairable components[J].ReliabilityEngineeringandSystemSafety, 2014, 121:136-145. [10] Yang C H, Yang J J, Dong P. Reliability model of multiplatform phased mission systems based on CPN[C]∥Proc.oftheIndustrialEngineeringandEngineeringManagement(IEEM), 2010:2224-2227 [11] Lefebvre D. Approximation of the asymptotic mean marking of SPNs with contPNs[J].NonlinearAnalysis:HybridSystems,2012,6(4):972-987. [12] Li L R, Wu X Y. Runge-Kutta algorithm of reliability model based on Markov chain for TT&C system[C]∥Proc.oftheInternationalConferenceonReliability,MaintainabilityandSafety(ICRMS), 2011:299-303. [13] Simlote A. Joint warfare system(JWARS)[C]∥Proc.oftheUserGroupConference, 2003:325-329. [14] Zhong J L,Guo J L,Wang Z J.Mixed model for equipment system of systems structure reliability in context of structural modeling[J].SystemsEngineeringandElectronics,2015, 37(3):80-85.(钟季龙,郭基联,王卓健.基于结构建模的装备体系结构可靠性混合模型[J].系统工程与电子技术,2015,37(3):80-85.) [15] Yang D S,Zhang W M,Zhang Y C, et al.Systemengineeringprinciplesandtechnology[M].Beijing:National Defense Industry Press,2013.(阳东升,张维明,张英朝,等.体系工程原理与技术[M].北京:国防工业出版社,2013.) [16] Liu J G, Ma A, Wang N S. Clustering algorithm of product architecture modularization based on design structurematrix[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2013,9(3):214-219.(刘建刚,马安,王宁生.基于设计结构矩阵的产品结构模块聚类方法[J].华南理工大学学报(自然科学版),2013,9(3):214-219). [17] Hu T,Yu J.Reliability optimization model of n/k(G) phased mission systems[J].SystemsEngineeringandElectronics,2012,34(1):217-220.(胡涛,俞建.n/k(G)表决冗余多阶段任务系统可靠性优化模型[J].系统工程与电子技术,2012,34(1):217-220.) [18] Rauzy R, Andrews J D. A simple component connection approach for fault tree conversion to binary decision diagram[C]∥Proc.ofthe1stInternationalConferenceonAvailability,ReliabilityandSecurity, 2006:449-457. [19] Shahrzad F R, Min X, Kien M N, et al. Dynamic availability assessment and optimal component design of multi-state weighted k-out-of-n systems[J].ReliabilityEngineeringandSystemSafety, 2014, 123:57-62. [20] Suprasad V, Zuo M J, Dill G. A fast and robust reliability evaluation algorithmfor generalized multi-state k-out-of-n systems[J].IEEETrans.onReliability, 2009, 58(1):88-97. [21] Félix B, Helena M, José M R. On allocation of redundant components for systems with dependent components[J].EuropeanJournalofOperationalResearch, 2013, 230(3):573-580. [22] Huang J S, Zuo M J, Wu Y D. Generalized multi-state k-out-of-n:g systems[J].IEEETrans.onReliability,2000,49(1):105-111. [23] Guo Q S,Tang Z J,Luo X M, et al.Thesimulationforequipmentoperation[M].2nd ed. Beijing:National Defense Industry Press,2013.(郭齐胜,汤再江,罗小明,等.装备作战仿真[M].第2版.北京:国防工业出版社,2013.) 钟季龙(1990-),男,硕士研究生,主要研究方向为飞行器总体设计与综合论。 E-mail:z_jilong@sina.cn 郭基联(1971-),男,教授,博士,主要研究方向为飞机经济性可靠性论证与评估。 E-mail:guojilian@aliyun.com 王卓健(1974-),男,副教授,主要研究方向为飞行器总体设计与综合论证、RMS评估与验证。 E-mail:zhuojianw1974@sina.com 邵帅(1992-),男,硕士研究生,主要研究方向为飞行器总体设计与综合论。 E-mail:z_jilong@sina.cn 网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150831.1751.004.html Research on phased mission based efficient reliability evaluation algorithm for equipment system of systems ZHONG Ji-long, GUO Ji-lian, WANG Zhuo-jian, SHAO Shuai (AeronauticsandAstronauticsEngineeringCollege,AirForceEngineeringUniversity,Xi’an710038,China) Abstract:The reliability evaluation for systematic fight mission in real time is an inevitably demand of the future wars. In order to solve the computational problem of the equipment system reliability in real time in the phased mission process, an efficient analytical algorithm based on the k/n (G) redundancy model for reliability evaluation is designed. Through the structural analysis of the equipment system and the mission overview, a binary decision diagram (BDD) model is proposed, which is transformed from the redundant fault tree. As for high computational complexity of the traditional method, a more effective algorithm on the basis of the recursive algorithm is designed. Taking the remote target attack mission of the aviation equipment system for instance, the simulation results indicate that the effective results of the phased mission reliability are obtained by using the proposed method. And the results show that the computational efficiency of the proposed algorithm is significantly improved compared with the traditional algorithm. It is applicable for the computational analysis of reliability of the large-scale systematic fight mission in real time and further direct mission plan. Keywords:phased mission system (PMS); equipment system of systems; k/n (G) model; efficient analytical algorithm 作者简介: 中图分类号:V 37; O 241.5 文献标志码:A DOI:10.3969/j.issn.1001-506X.2016.01.35 基金项目:国家自然科学基金(51201182);陕西省软科学技术基金(2011KRM122,2014KRM35)资助课题 收稿日期:2015-01-29;修回日期:2015-06-10;网络优先出版日期:2015-08-31。