铰接车转向阻力矩的测定与仿真
2016-01-16马骏,樊石光,贾小平等
铰接车转向阻力矩的测定与仿真
马骏,樊石光,贾小平,于魁龙
(装甲兵工程学院,北京100072)
摘要:对铰接车模型进行了转向阻力矩的测量,在此基础上,利用多体动力学仿真软件RecurDyn建立了轮式铰接车和履带式铰接车仿真模型,得到了整车转向阻力矩曲线。通过比较,对测量结果进行了验证,同时发现履带式铰接车比轮式铰接车原地转向阻力矩小,为下一步折腰转向液压缸的选型奠定了基础。
关键词:铰接车转向阻力矩RecurDyn仿真
中图分类号:TH132文献标识码:A
作者简介:马骏(1992-),男,山西大同人,硕士研究生,研究方向为车辆系统论证、仿真与评估。
收稿日期:2015-01-21
Testing and dynamical simulation for the moment of steering resistance of articulated vehicle
MA Jun , FAN Shiguang , JIA Xiaoping , YU Kuilong
Abstract:Firstly the moment of articulated vehicle model steering resistance was tested. On this basis, dynamical analysis and entity modeling of tracked and wheeled articulated vehicle were finished by using the multi-body dynamical simulation software RecurDyn. The curve of resistance moment was obtained and the result was also compared and analyzed. Through comparison, the testing result is verified and the conclusion is that the steering resistance moment of tracked articulated vehicle is less than that of wheeled articulated vehicle. It provides references for steering cylinder selection.
Keywords:articulated vehicle; steering resistance moment; RecurDyn; simulation


图1 铰接车整车结构
铰接式全地形车具有独特的铰接装置和折腰转向特性,除具备通过能力强、越障高、跨壕宽、爬坡度大、载重大等优点,还可以实现俯仰、扭转、横摆等单节车无法完成的动作,断开后还能满足空运空投的需求。图1铰接车通过使前后车体相对偏转一定的角度实现转向,由于俯仰自由度和前后车体沿纵向扭转自由度的存在,使得其具有良好的路面通过性,目前正广泛应用于农业、勘探、森林消防、救援抢险、军事等领域。但是,前后车辆连接自由度的增多也使转向稳定性变差。铰接车辆的转向阻力矩尤其是原地静态转向阻力矩,是转向机构、转向液压系统乃至整车设计必不可少的原始参数。铰接车辆具有转向阻力矩大、转向半径小的特点,它的转向阻力矩的确定是个重点和难点[1]。图1为轮式铰接车,而挂装橡胶履带后的铰接车具有接地压力小且通过性更好的特点,故本文重点分析了履带式铰接车的转向阻力矩。
1模型车转向阻力矩分析及测量
图1中所示铰接车采用液压式全驱动动力传动方案,发动机将动力通过泵分别传递至前后车两侧独立的四个行走马达上,马达再通过动力输出轴将液压能转化为机械能,再通过摆臂壳内传动比1.5的链传动将能量最终传递到8个驱动轮上。
铰接车由前车体、后车体及铰接机构连接而成,整车通过铰接机构两侧对称布置的转向油缸实现折腰转向。假定前后车铰接点固定不动,则其原地转向阻力矩公式如下[2]:
(2)
M为相对铰接点转动的转向阻力矩,N·cm;f为轮胎与地面间的综合阻力系数,f=0.10~0.15;G为转向桥的载荷,N;L为转向桥轮距,cm;r为转向桥轴线至铰接点的距离,cm。由公式可知,转向阻力矩与偏转角无关,基本恒定;转向力矩的大小与转向桥的轮距、转向桥的桥荷、转向桥到铰接点的距离有关,调整任一个因素,都会影响转向力矩[3]。

图2 模型样车
由于上述公式为经验公式且用于驱动轮只有4个的铰接车,故本文主要通过对模型进行实际测量获取原始转向阻力矩数据,如图2所示。在模型车两侧用木板顶住车轮,以使两侧动力传动轴刚性连接。假设:1)转向阻力矩与转向角速度无关;2)转向阻力矩在转向过程中为常值。利用测力计对模型车进行原地转向阻力矩测量,见表1。

表1 测力计拉力值(kg)
本模型中铰接点位于前后车体的对称中心处。整车实车重2.5 t,车长4 500 mm,车宽1 800 mm,轮胎外径800 mm,摆臂臂长800 mm;模型车重量为37.5 kg(质量比Cm=37.5/2 500=1∶67),与实车尺寸比例CL≈1∶2.5。对力臂L=240 mm时的实车转向阻力矩[2]计算如下:
=5003.29 Nm
(1)
2轮式铰接车建模与仿真
基于RecurDyn/Tire工具包,建立图3轮式铰接车仿真模型[4-5],设置整车原地转向路面。对机构中组成元件施加约束,通过Joint来建立约束副,以此来限制不同实体间的相对运动,使系统中各部件组成一个有机整体。对机构进行运动学/动力学分析,设置仿真时间t=3.4 s,步长step=800;对前后车体铰接点圆柱铰约束副施加0.5pi的转速驱动,后处理转向阻力矩曲线如图4所示,将力矩数据导出并除去初始时间段的不稳态工作点得到转向阻力矩平均值为5 192.14 Nm。

3履带式铰接车建模与仿真
由于所研究铰接车具有轮履合一功能且实际应用中履带式底盘结构相对轮式底盘有许多特殊的功能,因此有必要对挂装履带后的铰接车进行转向阻力矩的分析[6]。实际应用中,将两侧带有挡齿的橡胶履带套装在两侧驱动轮外圈并用锁扣锁紧即可。该铰接车多用于矿山和沙漠地带,对其履带式底盘的要求更高。
为便于理论分析,做如下简化:不计履带宽度的影响;履带接地压力均匀;前后车质心与车辆几何中心重合;地面坚实,不考虑履带侧面的刮土阻力[7]。
由于履带车在地面行驶时两侧履带存在滑转或滑移,在转向时履带接地段的速度瞬心 Qi(i=1,2,3,4)即转向极与履带中心在横向上有一个偏移量Ai(转向极偏移量)。同时,由于离心力、前后车体的相互作用或是地面横向刮土阻力的不平衡会造成单个车体受到横向合力,因此转向极相对履带中心还有一个纵向偏移量Dj(j=1,2 ),使得摩擦力在横向分力的合力不为零来平衡上述横向合力。
如图5所示对于某条履带上到线Oo′距离为y的一点,vi、vxi、vyi分别为其绝对、横向、纵向速度,且vxi=ωAi、vyi=ωy。地面作用反力Fi的方向和绝对速度vi的方向相反,当在此处取长度微元dy,则:
Fi=(φPi/2L)dy
(3)

图5 单节履带车运动学分析图示
其中φ为地面附着力系数,Pj为相应履带上的载荷。
以下是由此得到第i条履带与地面摩擦产生的的纵向力、横向力及转向力矩[8]:
纵向力为

(4)
其中ai=Ai/(L/2)为履带接地段转向极横向相对偏移量;dj=Dj/(L/2)为车辆转向极纵向相对偏移量,铰接履带车转向阻力分布如图6。
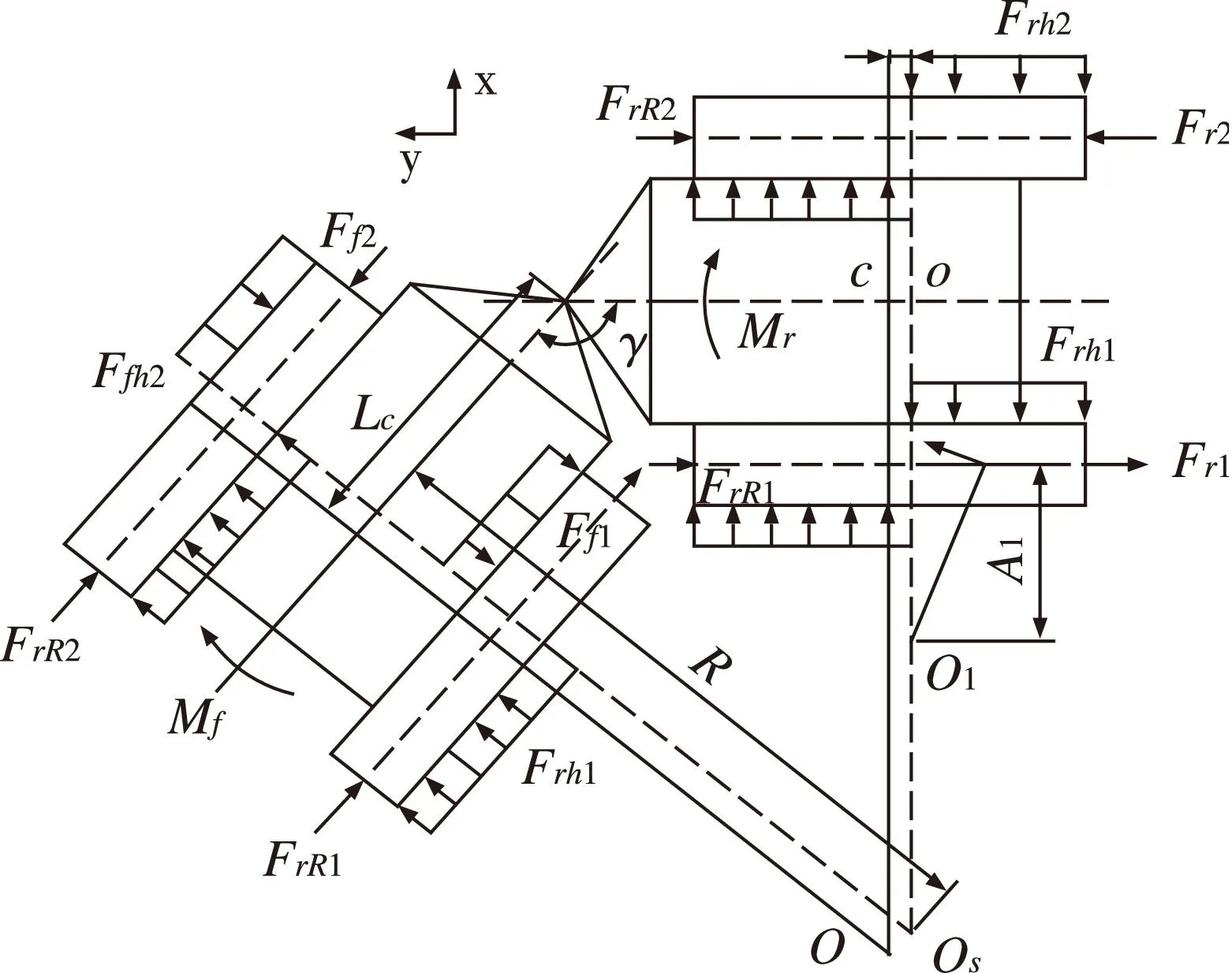
图6 铰接履带车转向阻力分布图示
横向力为:


(5)
转向力矩为
(6)



(7)

图7 铰接履带车仿真模型
基于RecurDyn的低速履带工具包Trank-LM建立了图7铰接履带车模型。车体做了简化,其转动惯量根据实车三维造型获得,履带子系统包括:诱导轮、托带轮、主动轮和履带板。对机构进行运动学和动力学分析,其中设置仿真时间t=3.4 s,步长step=800[4-5];对前后车体铰接点圆柱铰约束副施加0.5pi的转速驱动,后处理转向阻力矩曲线如图8所示,将测量曲线导出并除去其中的非稳态点或尖点,对稳态点取平均值的履带式铰接车转向阻力矩为4 188.86 Nm。
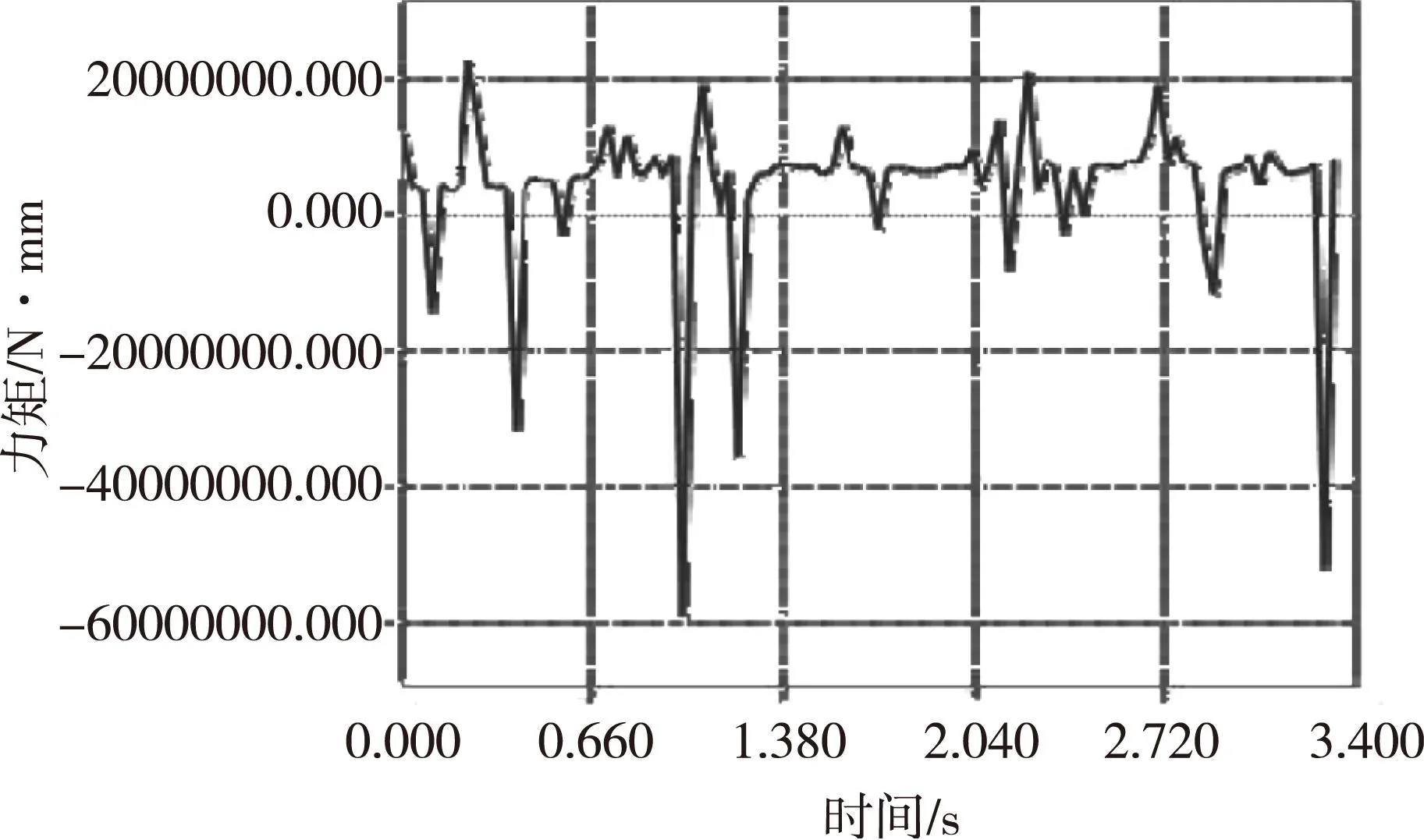
图8 铰接履带车转向阻力矩曲线
4结论
通过对模型车转向阻力矩的测量以及轮式、履带式铰接车的仿真分析,得出结论如下:
1)M原=5003.29 Nm,M轮仿=5192.14 Nm,M履仿=4188.86 Nm;从结果可知,轮式车转向阻力矩仿真值超出测量值3.77%,误差在合理范围内,仿真值可信,履带车转向阻力矩仿真值低于轮式车测量值16.27%,可见铰接车加装履带后极大的提高了转向功能和通过性。
2)M轮仿在误差允许范围内,故在后续整车设计时可用仿真所得转向阻力矩作为设计依据,来进行结构优化;履带式铰接车转向阻力矩低于轮式铰接车转向阻力矩,故在非结构地形下或转向困难时,可加装履带以提高路面通过性。另外铰接车原地转向时的转向阻力矩能达到行驶时的2~3倍,对原地转向阻力矩的研究是整车性能分析的基础之一。
参考文献
[1]南基信,秦四成,阚君武,等.三桥铰接车辆动态转向阻力矩的分析和计算[J].吉林工业大学学报,1996,26(1):16-23
[2]王慧,侯友山,金纯.铰接车辆转向阻力矩的分析[J].矿山机械,2010,38(1):38-41
[3]汪建春.铰接式车辆原地转向阻力矩计算及力学模型计算[J].矿山机械,2008,36(21):53-58
[4]焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010
[5]刘义.RecurDyn多体动力学仿真基础应用与提高[M].北京:电子工业出版社,2013
[6]李阳,成凯,任鹏.基于RecurDyn的铰接式履带车辆爬坡性能分析[J].煤矿机械,2011,32(07):93-95
[7]王国强,程悦荪,马若丁.铰接式履带车辆的结构参数对转向性能的影响[J].吉林工业大学学报,1997,27(86):7-12
[8]闫清东,张连第,赵毓芹,等.坦克构造与设计[M].北京:北京理工大学出版社,2007