基于PLC控制机械手在仓储物品存储中的应用
2016-01-16折小荣,张贤信,张大斌等
基于PLC控制机械手在仓储物品存储中的应用
折小荣1,张贤信2,张大斌2,丁乃典2
(1.贵州省标准化院,贵州贵阳550000;2.贵州大学机械工程学院,贵州贵阳550025)
摘要:根据仓储物品存储发送的实际需求,对运输物品的特性进行分析,设计一种利用斜坡重力,基于PLC控制的仓储物品运送机械手。该机械手通过编码器对位置信息进行检测,通过伺服电机带动导轨运动,实现机械手在X、Y方向的平面复合运动,准确将物品输送到指定的储存槽,实现了物品的自动入库。
关键词:仓储PLC机械手编码器
中图分类号:TP241文献标识码:A
作者简介:折小荣,男,山西太原人,高级工程师,研究方向:检测技术及自动控制,标准化。
收稿日期:2014-11-03
The application of PLC controlled robot in goods storage
ZHE Xiaorong, ZHANG Xianxin, ZHANG Dabin, DING Naidian
Abstract:According to the actual needs of goods storage and distribution, the characteristics of goods were analyzed. A storage goods transport robot was designed based on the principle of ramp gravity and PLC control. The robot can detect goods’ position information via an encoder, then the slide way is driven by a servo motor to achieve complex plane manipulator movement of the robot in both X and Y directions, which accurately conveys the goods to the designated storage tank, so as to achieve automatic warehousing.
Keywords:warehousing;PLC;robot;encoder
0引言
自动仓储机械手是一种用于自动化仓储库房中的核心部件,具有结构简单,动作迅速、平稳、可靠等优点。该机械手用于仓储的自动配送,其涵盖了PLC控制技术、位置检测技术等,减少劳动人员对于仓储物品的配送强度,提高仓储物品的自动化管理,具有广泛的应用前景。
1仓储机械手工作原理和结构
自动化物料机械手由执行机构,驱动系统,控制系统所组成,整个系统需要完成的任务如下:
1)盒装物品在传感器的检测下进入传送带,对盒装物品的条形码进行扫描,物品正确继续传送,否则停止。
2)物品在传送带的输送下进入滑槽内,滑槽与水平面呈25°。运输物品在重力的作用下,滑下至挡板上。
3)通过编码器将物品所需运送的储物柜位置信息转化为电信号,在X伺服电机的驱动下,X导轨带动固联在滑块上的Y导轨进行水平方向上的运动,与此同时固联在Y导轨滑块上的机械手在Y向伺服电机的驱动下进行竖直方向上的运动。
4)机械手在X-Y的方向上运动到达指定的储物槽上,滑槽在交流电机的带动下翻转,电磁铁失电,顶针往回收缩,折型挡板打开,物品顺势滑出,进入储物槽中。

1.X轴导轨;2.Y轴导轨;3.机械手;4.Y轴伺服电机;5.X轴伺服电机;6.储物槽。 图1 自动化仓储机械手总装图
5)机械手回到原位,一个装载过程结束。
如图1,该机械手安装在导轨上,通过XY导轨运动,可以实现机械手在X、Y平面上的二维运动。该机械手属于二自由度机械手,可以完成X、Y两个方向的移动。

图2 机械手
机械手滑槽通过支承板的连接,安装在传动轴上,如图2所示。
滑槽的侧倾由交流伺服电机驱动而实现,其传动过程为:电机运转启动,通过联轴器带动传动轴旋转,从而带动滑槽动作。传动轴上的轴承选用角接触球轴承,具有同时承受单向轴向载荷和径向载荷的特点,成对使用能够满足机身结构的承载需求。总体设计思想为:通过电机(带减速器)驱动滑槽侧倾,以保证盒装物品自动对齐,滑槽底部设计有挡板机构,通过挡板的开合,控制盒装物品滑入储物槽。

表1 机械手设计参数
2导轨的受力及校核
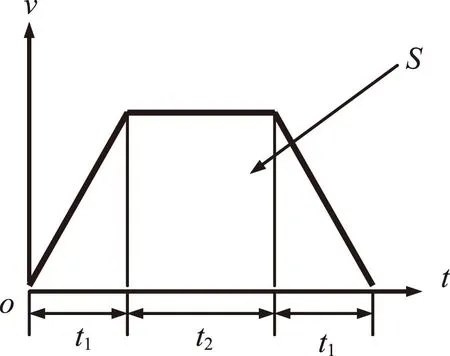
图3 速度特性图
运动参数主要通过速度规划确定,速度规划采用直线速度特性,如图3所示。运动方程为:
S=v(t1+t2)
式中:S—运动行程;v—最大运动速度;t1—加速(或减速)运动时间;t2—匀速运动时间。

图4 导轨受力图
机械手在工作时进行上下左右移动,加速和停止,导轨会受到一定强度的冲击,导轨的工作状况直接决定了机械手的控制精度。所以需要对工作导轨进行受力分析校核,选择工作性强,定位精度高,磨耗小且能长时间维持精度的导轨,能够有效地缓解工作过程带来的冲击。导轨受力如图4所示,根据作业要求,机械手在加速时导轨受力最大。
X导轨所受到的力及转矩:
Fx=W×a;Fy=0;Fz=M×g
Mx=Fz×Ly;My=Fx×Lz;Mz=Fy×Lx
W=K×m;Fx=W×(g+a)
Mz=Fx×Ly;My=Fx×Lz;Mx=0
式中:W为移动质量;K为安全系数,取K=1.2; Ly为机械手的重心到过轴线与导轨相垂直平面的距离;Lz为机械手的重心到过轴线与导轨所在平面的距离;g为重力加速度,a为移动加速度;同理,Y导轨的受力通过同样的方法计算出;通过校核选择合适的导轨进行安装。
3控制系统要求
本控制系统中设置手动和自动工作两种工作方式,并带有显示功能。当切换到自动位置时,按下相应的操作按钮可以实现机械手上升下降左移右移挡板打开的动作。运输机械手工作时,通过编码器进行位置检测,再由伺服电机带动机械手将物品输送到相对应的储物盒中。
控制系统共有13个输入点,以及7个输出点,选用欧姆龙CPMIA型PLC;对其进行I/O地址分配,其表如表2所示。

表2 I/O分配表
接线图如图5所示。

图5 控制接线图
4结束语
自动化仓储机械手是仓储系统的核心部件,能够存储和管理多个品种、一定数量和各种包装的物品,确保物流高峰期的供给,避免出现用料短缺的情况,大大减少仓储人员的劳动强度,实现了仓储的自动化管理,具有广泛的应用前景。
参考文献
[1]吉晓尼,齐维浩.机器人力平衡方程式及卸荷装置优化设计[M]. 机器人,1989.第1期
[2]张铁异,何国金,黄振峰.基于PLC控制的混合型气动机械手的设计与实现[J].液压与气动,2008(9)
[3]范金玲.基于PLC的气动机械手控制系统设计[J].液压与气动,2010(7)
[4]李国平,时圣勇,李宏伟,艾长胜,孙选. 基于PLC控制的气动机械手实验装置的研制[J].液压与气动,2003(1)
[5]鲍燕伟,吴玉兰. 一种通用气动机械手的控制设计[J].机床与液压,2006(9)
[6]杜玉红,李修仁.生产线组装单元气动搬运机械手的设计.液压与气动,2006(5)
[7]谢亚青,储开芳.基于PLC的五自由度气动搬运机械手研制.液压与气动,2007(11)
[8]杨后川,杨萍,陈勇,张学明. 基于FX2N PLC控制的实验用气动机械手设计[J].液压与气动,2009(2)