车辆系统的多个蛇行运动
2016-01-15高学军李映辉关庆华
高学军,李映辉, 关庆华
(1. 成都理工大学地质灾害防治与地质环境保护国家重点实验室, 成都 610059;2.西南交通大学力学与工程学院, 成都 610031; 3. 西南交通大学牵引动力国家重点实验室, 成都 610031)
第一作者高学军男,博士, 副教授,1979年生
车辆系统的多个蛇行运动
高学军1,李映辉2, 关庆华3
(1. 成都理工大学地质灾害防治与地质环境保护国家重点实验室, 成都610059;2.西南交通大学力学与工程学院, 成都610031; 3. 西南交通大学牵引动力国家重点实验室, 成都610031)
摘要:采用升速法和降速法对复杂非线性轮轨接触关系下车辆系统的分岔行为进行研究,发现系统存在运动幅值相差不大的两个蛇行运动解并存的现象,这种多个蛇行运动解并存的特性与一般的由单个亚临界Hopf分岔所引起的稳定定常运动与稳定蛇行运动并存的特性有所不同,很容易使车辆在相应速度附近运行时由于扰动的不同而使摆振幅值往复变化,影响车辆的正常安全运行,因此临界速度测定时需要在多种可能的激励条件下多次测试综合分析。
关键词:轮轨接触关系; 车辆系统; 分岔; 并存; 临界速度
基金项目:国家自然科学基金项目(11102030, 11372257, 51305360,11472064)
收稿日期:2014-01-02修改稿收到日期:2014-05-08
中图分类号:O322;U260.11
文献标志码:A
DOI:10.13465/j.cnki.jvs.2015.11.035
Abstract:The bifurcation behaviors of a railway vehicle system with a complex nonlinear wheel-rail contact relation were investigated using the methods of increasing speed and decreasing speed. It was shown that two hunting motions with similar amplitudes coexist in the system; there are some differences between the coexistence of multiple hunting motions and the coexistence of the stable steady motions and the stable hunting motions caused by a single sub-critical Hopf bifurcation in the railway vehicle system; the coexistence of multiple hunting motions may easily cause the reciprocating change of the vehicle’s shimmy amplitude due to different disturbances to affect the normal and safe operation of the vehicle; therefore, the critical speed should be determined through comprehensive analysis under various kinds of possible excitations and multiple tests.
Multiple hunting motions of a railway vehicle system
GAOXue-jun1,LIYing-hui2,GUANQing-hua3(1. State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu 610059, China;2. School of Mechanics and Engineering, Southwest Jiaotong University, Chengdu 610031, China;3. State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
Key words:wheel-rail contact relation; railway vehicle system; bifurcation; coexistence; critical speed
车辆系统横向运动稳定性研究[1-2]一直是铁路工程师和科研工作者非常关心的问题,因为它不但涉及到车辆临界速度[3-4]的确定,直接影响列车允许的最高运行速度,而且还涉及到车辆运行过程中各种可能的运动状态及其对其它性能指标的影响。在这方面,国内外许多专家学者已开展了卓有成效的研究工作:Cooperrider等[5]应用非线性修正的纵向和横向蠕滑力(未考虑自旋蠕滑力)研究车辆系统的动力学行为。True[6]发现对称的车辆系统中会存在不对称的运动形式。杨绍普等[7]对具有滞后非线性悬挂的转向架和车辆蛇行运动的稳定进行了研究。高学军等[8]探讨了延续算法在简单轨道客车系统分岔方面的应用。这些研究主要是采用线性或简单非线性轮轨接触关系来分析的,与实际的轮轨接触状态存在一些差别,使得应用的范围受到部分限制。
已有学者开始应用复杂非线性轮轨接触关系来进行分析。Zeng[9]使用QR算法结合牛顿-拉夫逊法求解车辆系统的Hopf分岔点,应用龙格-库塔法结合Poincaré映射确定系统的极限环。Xia[10]考虑了楔块的二维干摩擦特性研究了三大件式货车的动力学问题。Hoffmann[11]通过引入“事件系统”分析了欧洲两轴货车的动力学问题。Gao等[12]则研究了真实的轮轨型面下转向架系统的对称/不对称分岔行为。
在前人研究工作的基础上,本文拟采用复杂非线性轮轨接触关系分析铁道车辆系统的分岔行为,主要讨论分岔过程中存在的多个蛇行运动的情形。研究结果可为进一步改善车辆运行品质、临界速度的测定及许用范围值的确定提供参考和部分依据。
1动力学模型描述
1.1复杂非线性轮轨接触关系
对中国的车轮踏面LM和钢轨型面CHN60,标准轨距1 435 mm,轮对内侧距1 353 mm,采用RSGEO[13]软件包即可生成轮轨相互匹配时的复杂非线性轮轨接触关系数表。
图1给出了轮轨接触数表中Kalker系数C11与轮对横移量之间的非线性变化关系。由图可见,当轮对横移量较小时,Kalker系数C11与轮对横移量之间存在近似的线性关系,而一旦轮对横移量超过某一值时,C11与轮对横移量之间则不再是简单的线性关系,而是随着轮对横移量的变化急剧变化,其中不乏突增或突减的区域。
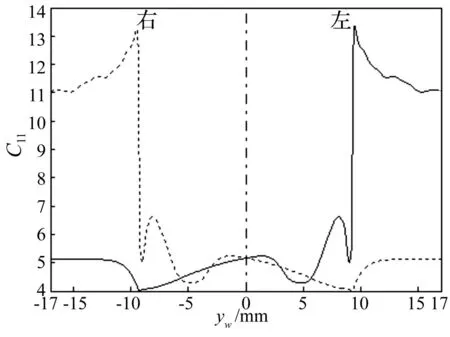
图1 Kalker系数C11与轮对横移量之间的非线性变化关系Fig.1 The Kalker’s creepage coefficients C11 as a nonlinear function of the lateral displacement of the wheel-set
1.2蠕滑力/力矩的计算
轮轨间的蠕滑力/力矩与蠕滑率有关,纵向、横向、自旋蠕滑率对左轮(l,±或∓取上面的符号,后同),右轮(r, ±或∓取下面的符号,后同)可依次表示为[14]
(1)
式中:V为车辆运行速度;Ω=V/r0为车轮名义滚动角速度;yw为轮对横向位移;ψw为轮对摇头角位移;r(l, r)为左/右轮滚动圆半径;(δl,δr)为左/右轮轮轨接触角;φw为轮对侧滚角;(al,ar)为轮对质心到左/右轮接触点的横向距离。
先根据Kalker线性蠕滑理论[15]计算轮轨间的线性蠕滑力,然后再应用沈氏蠕滑理论[16]进行非线性修正,最后将修正后的接触斑蠕滑力/力矩通过坐标变换转换到轨道坐标系内即可建立车辆系统的运动微分方程组。
1.3法向接触力的计算
实际上,车辆运行中的法向力也是随着轮对横移量的不同在不断发生着变化。
图2给出了由RSGEO得到并转换后的静态法向力与轮对横移量的非线性变化关系,由图2可知,大多数情况下,静态法向力与轴载荷的一半相差不大,只有当轮对横移量超过轮轨间隙(η=9.0 mm)时,法向力才会发生急剧变化而减小。
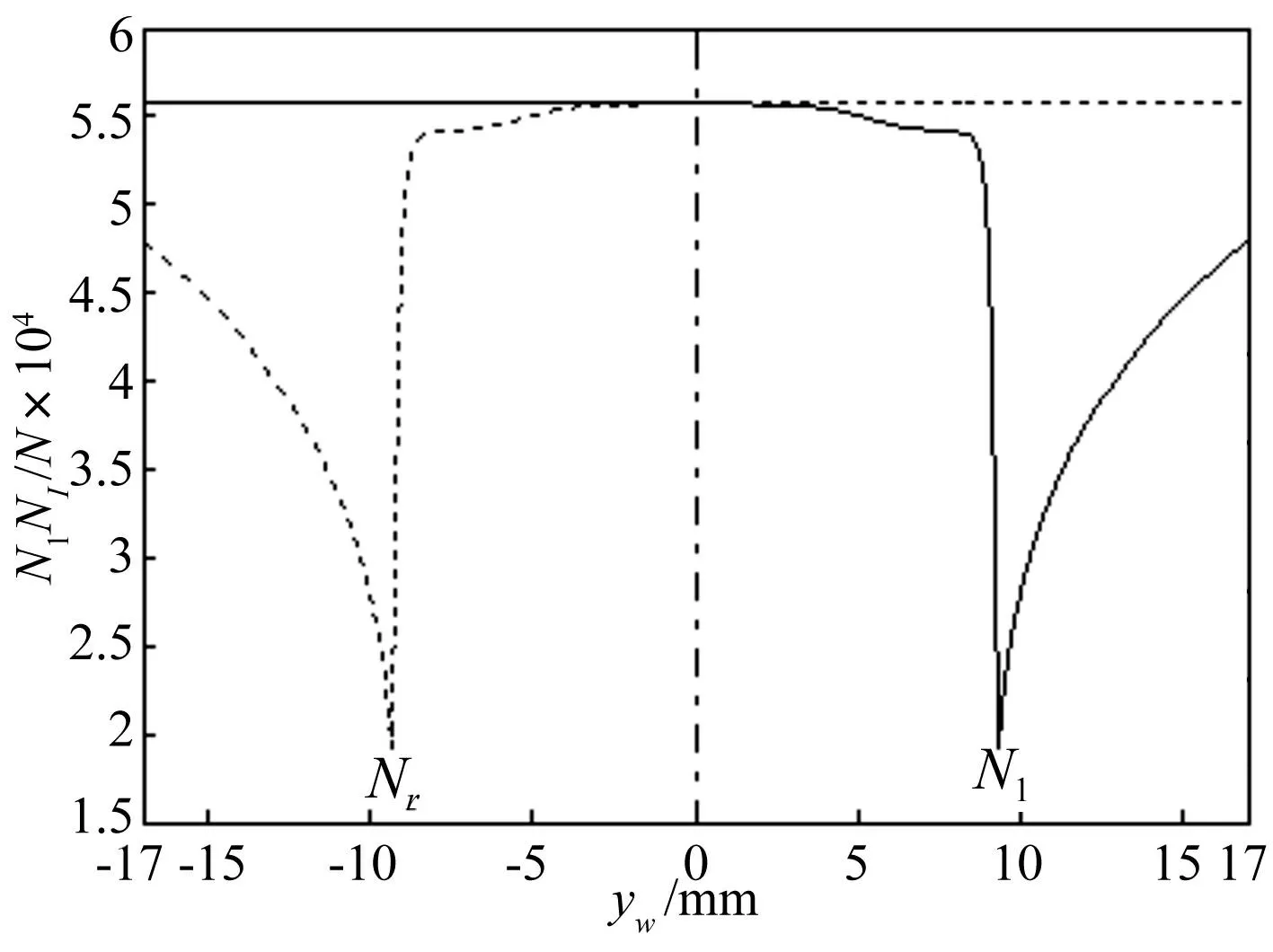
图2 静态法向力与轮对横移量的非线性变化关系Fig.2 The static normal forces as a nonlinear function of the lateral displacement of the wheel-set
左、右轮法向力在横向方向的分量N(l,r)y和垂向方向的分量N(l,r)z分别为:
(2)
1.4车辆系统运动微分方程
考虑包括1个车体(mc,Icx,Icz)、2个构架(mt,Itx,Itz)、4个轮对(mw,Iwx,Iwz)等刚体和一系悬挂(Kpx,Kpy,Kpz,Cpx,Cpy,Cpz)及二系悬挂(Ksx,Ksy,Ksz,Csx,Csy,Csz)的四轴客车横向稳定性分析模型(见图3)。

图3 四轴客车横向稳定性分析模型Fig.3 Model of four-axle railway passenger car system
分析中只考虑各个刚体的横向运动[2],因此整个系统共有17个自由度:4个轮对的横移ywi(i=1-4)和摇头ψwi运动;2个构架的横移ytj(j=1-2)、侧滚φtj及摇头ψtj运动;车体的横移yc,侧滚φc及摇头ψc运动。
整个车辆系统运动微分方程组可以表示如下
(3)
式中:F(l,r)x、F(l,r)y、M(l,r)z为非线性关系修正且已转换到轨道坐标系内的纵向蠕滑力、横向蠕滑力和旋转蠕滑力矩。dw为一系悬挂横向距离之半,ds为二系悬挂横向距离之半,lt是转向架轴距之半,lc为车辆定距之半。hcb为车体重心至二系悬挂高度,hbt为构架重心至二系悬挂高度,htw为构架重心至一系悬挂高度。
式(3)中一系悬挂纵向力、横向力、垂向力为
(4)
式中:i=1,3时,±或∓取上面的符号;i=2,4时则取下面的符号。下标i(j)=1(1), 2(1), 3(2), 4(2)代表四个轮对及其所对应的转向架。
同理,二系悬挂纵向力、横向力、垂向力为
(5)
式中:j=1,2分别为前后转向架构架且当j=1时,±或∓取上面的符号;j=2时则取下面的符号。
令系统状态向量y∈R34,则车辆系统的动力学问题式(3)可归结为如下形式的自治常微分方程组系统
(6)
式中:V∈R+是系统参数,此处即为车辆运行速度,f为状态向量函数。
2分析方法
首先通过解析法并结合数值方法确定系统式(6)的线性化Jacobi矩阵,求解系统的Hopf分岔点速度。然后通过Poincaré截面法构造分岔图说明系统的分岔行为。分析中将Poincaré截面定义为前转向架前导轮对横向速度为零,横向位移非负的那个瞬时
(7)
在接触数表的使用方面,采用三次样条对任意轮对横移处的相关非线性轮轨接触相关参量进行插值,以保证计算结果的可靠性。
3数值计算结果与分析
以某高速客车为分析对象,车辆系统中各刚体的质量值、刚度系数、阻尼系数等,轮轨间的粘着系数取μ=0.40。
3.1Hopf分岔点
为了寻求车辆系统的Hopf分岔点,需要通过方程组式(6)线性化系统Jacobi矩阵的特征值进行判定。图4给出的是系统Jacobi矩阵非零元素分布情况。其中“*”表示解析计算元素,“+”表示数值计算元素,“1”表示1元素。虽然整个矩阵共有34×34=1156个元素,但非零元素却只有159个,而这些元素中需要通过数值计算的则只有32个,应用这种方法可以大大提高计算的效率和精度。

图4 Jacobi矩阵非零元素分布情况Fig.4 The distribution of the nonzero elements of the Jacobi matrix
分析中,应用向前差分法数值计算Jacobi矩阵中的数值计算元素。为了得到第i行第j列处数值计算元素的值,若函数在yj处的值为fi,现给yj增加一个扰动δ,得到该状态下的函数值fi,+,则Jacobi矩阵(i,j)处数值计算元素的值为
(8)
计算中系统状态向量y的初始值取蛇行运动(如速度V=67.5 m/s)时某个解向量的10-6倍,而扰动量则取δ=10-9。
通过计算发现当车辆运行速度V=97.491 m/s (α1,2=-1.004×10-5±26.405i,α代表系统特征值)时,系统第一对复共轭特征值正向穿越虚轴,原来稳定的定常解变得不稳定,据此判定V=97.491 m/s是系统第1个Hopf分岔点速度。当车辆运行速度继续增加到V=100.816 m/s(α1,2=0.351±26.851i,α3,4=2.739×10-5± 26.871i)时,系统又有一对复共轭特征值正向穿越虚轴,原来不稳定的定常解变得“更加不稳定”,由此可以断定V=100.816 m/s是系统第2个Hopf分岔点速度。从这两个不同的Hopf分岔点会分岔出不同的周期解分支,下面进行阐释。
3.2蛇行运动1解

图5 前转向架前导轮对横向位移分岔图Fig.5 The bifurcation diagram of the leading wheel-set of the front bogie showing the lateral displacements versus the speed
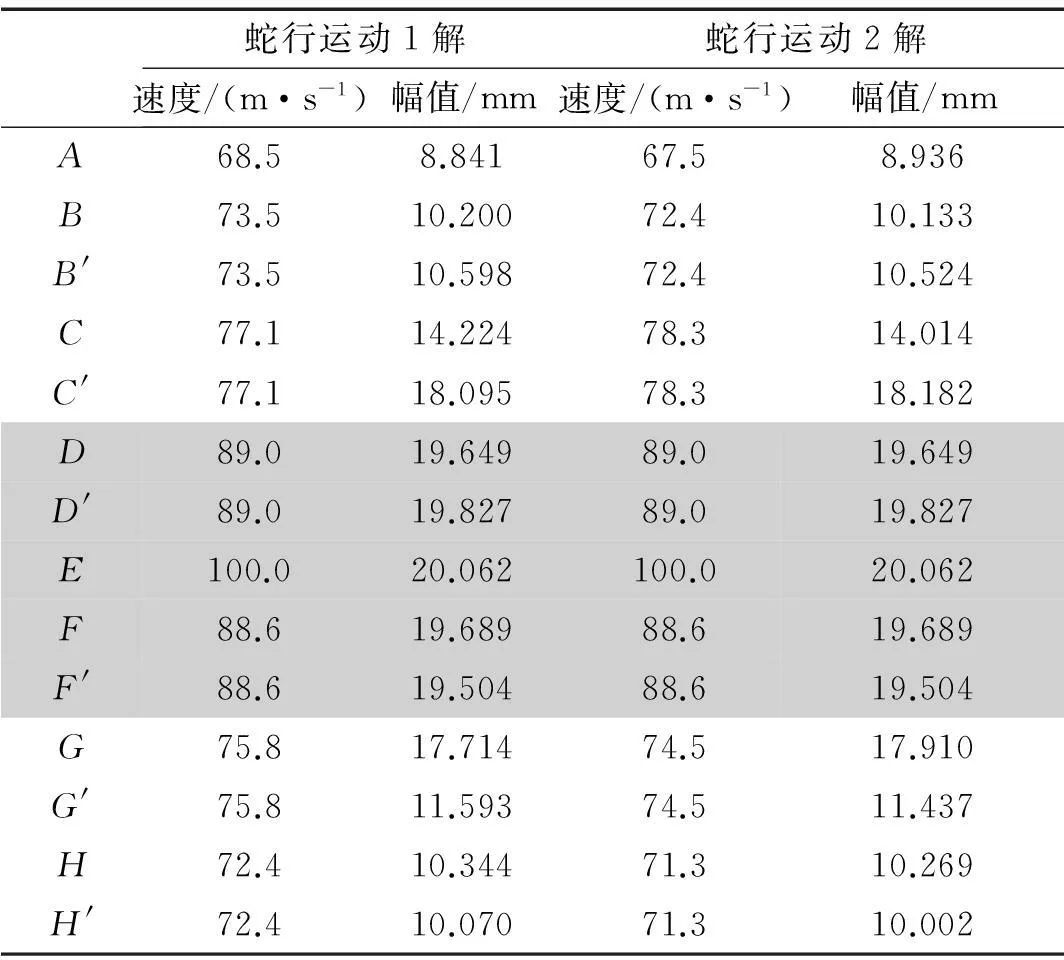
图5给出的是前转向架前导轮对(1位轮对)在速度67.0 m/s 因降速过程中出现多次跳跃现象,再通过升速的方法追踪系统其它可能的分岔点。车辆运行速度从VA=68.5 m/s的蛇行运动解开始逐渐增加,数值积分初始值的取法与降速时类似,整个系统则会沿着ABB′CC′DD′E解分支前进。也就是说,随着速度的增加,1位轮对横向振动幅值缓慢增加达到图中的B点,然后出现一个跳跃,从周期吸引子B点跳跃到周期吸引子B′点。之后随着速度的继续增加,振动幅值缓慢增加直到到达C点之后出现一个大幅跳跃到周期吸引子C′点上,而后到达D点之后又跳跃到更高幅值的D′点上,最后到达E点。 由上述分析可知,降速过程中的跳跃HH′比升速过程中的跳跃BB′延迟了,形成了迟滞现象。由此可以推断,B点和H点对应于车辆系统的两个鞍结分岔点,在BH之间应该存在不稳定的周期解分支曲线,类似的现象也同样发生于CG和DF点之间,因此可以确定:整个分岔行为都是在同一个解分支上发生的。 为说明图5中从A点跳跃到定常解的现象,图6给出了相同初始条件下车辆运行速度分别为V=68.5 m/s和V=68.4 m/s时1位轮对横向位移时间历程图。由图可见,当运行速度V=68.5 m/s时,随着时间的推移,1位轮对以8.841 4 mm的振动幅值作周期性的横向运动;而当运行速度降低到V=68.4 m/s时,随着时间的延续,1位轮对横向振动最终衰减到轨道中心线的位置。 图6 速度V=68.5 m/s和V=68.4 m/s时前转向架前导轮对横向位移时间历程图Fig.6 Time histories of the leading wheel-set of the front bogie at V=68.5 m/s and V=68.4 m/s 3.3蛇行运动2解 一个很有意思的现象是,在图5中周期解位置的附近还存在另外一个周期解分支见图7。当车辆运行速度V≤85.8 m/s时,该周期解分支所发生的分岔现象与图5类似,只是相对应特征点的位置及幅值有所变化;当速度达到V=85.8 m/s时,这个解分支与图5中的解分支合并成一个周期解分支,因此后面的分岔现象与图5完全一致,这里就不再对这个解分支上的分岔现象及具体状态进行重复描述。 图7 前转向架前导轮对横向位移分岔图Fig.7 The bifurcation diagram of the leading wheel-set of the front bogie showing the lateral displacements versus the speed 表2给出了蛇行运动1解和2解相关特征点值,其中灰色区域代表两个解分支重合部分的特征点值。由表可知,蛇行运动2解和蛇行运动1解确实分属于两个不同的解分支。 表1 蛇行运动1解和2解相关特征点值 3.4小讨论 实际上,在铁道车辆系统中,蛇行运动是一种非常普遍的自激振横向摆动现象,这种现象主要是由车辆的前进速度和轮轨间的非线性接触力引起。由于这种运动是铁道车辆系统的一种内在特性,因此车辆蛇行运动一旦出现就很难被消除,除非车辆的运行速度低于车辆临界速度。当车辆发生蛇行运动时,试图控制系统的扰动使蛇行运动消除基本是不可能的,因为实际的轨道不可能是理想光滑平直的,总是存在很多的不平顺,这些不平顺不停的“激发”车辆系统,使其响应实际上是大量瞬态成分和稳态成分叠加的结果,因此蛇行运动时实际的实验测试结果往往看起来并不如图6中蛇行运动的结果平整、光滑。 由于车辆临界速度定义为在参数-解空间中寻找最高速度值使定常解是唯一渐近稳定的解,或者寻找最低速度值使蛇行运动刚好出现的过程,因此对应本文所研究的车辆系统,临界速度应为V=67.5 m/s,Hopf分岔点速度为V=97.491 m/s和V=100.816 m/s,系统实际上发生的是亚临界Hopf分岔,其间存在不稳定的周期解分支曲线。 需要说明的是,在模拟或实际的测试中,如果被激发起来的车辆系统恰好位于图5解分支所确定的吸引域上,则会得出临界速度为V=68.5 m/s的不正确结论,从这方面来说,临界速度的测定需要在多种可能的激励条件下多次测试综合分析才好,而这更需要充分了解临界速度区域车辆系统的相关动力学行为。当然,本文中这两个点的速度相差不大,在具体的工程设计中为了安全起见还要进行折减,因此对工程设计没有任何影响。但如果这两个值相差较大呢?在这方面值得进一步研究探讨。 4结论 本文采用升速法和降速法对复杂非线性轮轨接触关系下车辆系统速度大范围内的分岔行为进行了研究。发现车辆系统因发生亚临界Hopf分岔而存在稳定的定常运动与稳定的周期运动并存的现象,同时也发现车辆系统存在运动幅值相差不大的两个蛇行运动解并存的现象。这种现象与整个车辆系统的构造、各部件之间的相互联结及作用、各种参数的取值(质量、惯量、刚度、阻尼、长度、距离)及轮轨接触关系等息息相关,可以说它们的“联合”作用导致了多个蛇行运动解的并存现象。另一方面,这种多个蛇行运动解并存的特性与一般的由单个亚临界Hopf分岔所引起的稳定定常运动与稳定蛇行运动并存的特性有所不同,很容易使车辆在相应速度附近运行时由于扰动的不同而使摆振幅值往复变化,影响车辆的正常使用并给安全运行带来危险隐患,因此应该尽量避免。据此说明临界速度的测定需要在多种可能的激励条件下多次测试综合分析,而这更需要充分了解车辆运行速度高于临界速度时车辆系统的相关动力学行为。 参考文献 [1]Knothe K, Bohm F. History of stability of railway and road vehicles[J]. Vehicle System Dynamics, 1999, 31(5): 283-323. [2]Garg V K, Dukkipati RV. 铁道车辆系统动力学[M]. 沈利人,译. 成都: 西南交通大学出版社, 1998. [3]True H. On the critical speed of high-speed railway vehicles[C]. Noise and Vibration on High-Speed Railways. FEUP Porto Portugal, 2008, 149-166. [4]翟婉明. 车辆-轨道耦合动力学[M]. 2版.北京: 中国铁道出版社, 2002. [5]Cooperrider N K. The hunting behavior of conventional railway trucks[J]. ASME Journal of Engineering for Industry, 1972, 94(2): 752-762. [6]True, H. Railway vehicle chaos and asymmetric hunting[J]. Vehicle System Dynamics, 1992, 20(S1): 625-637. [7]杨绍普, 申永军. 滞后非线性系统的分岔与奇异性[M]. 北京: 科学出版社, 2003. [8]高学军, 李映辉, 乐源. 延续算法在简单轨道客车系统分岔中的应用[J]. 振动与冲击, 2012, 31(20): 177-182. GAO Xue-jun, LI Ying-hui, YUE Yuan. Continuation method and its application in bifurcation of a railway passenger car system with simple rails[J]. Journal of Vibration and Shock, 2012, 31(20): 177-182. [9]Zeng J. Numerical analysis of nonlinear stability for railway passenger cars[J]. Chinese Journal of Mechanical Engineering, 2001, 14(2): 97-101. [10]Xia, F.J. The dynamics of the three-piece-freight truck[D]. The Technical University of Denmark, Doctor Thesis, 2002. [11]Hoffmann M. On the dynamics of European two-axle railway freight wagons[J]. Nonlinear Dynamics, 2008, 52(4): 301-311. [12]Gao X J, Li Y H, Yue Y, et al. Symmetric/asymmetric bifurcation behaviours of a bogie system[J]. Journal of Sound and Vibration, 2013, 332(4): 936-951. [13]Walter K, Moelle D. ACRadSchiene-To create or approximate wheel/rail profiles[R], 2010. [14]Petersen DE, Hoffmann M. Curving dynamics of railway vehicles[R]. Informatics and Mathematical Modelling, The Technical University of Denmark, Lyngby, 2002. [15]Kalker J J. A fast algorithm for the simplified theory of rolling contact[J]. Vehicle System Dynamics, 1982, 11(1): 1-13. [16]Shen ZY, Hedrick JK, Elkins JA. A comparison of alternative creep force models for rail vehicle dynamic analysis[C]. Proceeding of 8th IAVSD Symposium on Vehicle System Dynamics, Dynamics of Vehicles on Roads and Tracks. MIT, Cambridge: Swets and Zeitlinger, 1984, 591-605.