基于图像处理的道路拥堵快速检测研究
2016-01-12李炜山东交通学院交通与物流工程学院山东济南250023
李炜(山东交通学院交通与物流工程学院,山东济南 250023)
基于图像处理的道路拥堵快速检测研究
李炜
(山东交通学院交通与物流工程学院,山东济南250023)
摘要:提出一种基于图像处理技术的城市道路车辆拥堵程度快速检测算法。为既能加快处理速度又可任意选取有车区域路段,提出人机交互的有车区域检测。利用拥堵图像和通畅图像纹理特性的差异,提出基于纹理分析的车辆密度估计。通过原始图像灰度降级和灰度共生矩阵计算及特征提取,从有车区域图像中提取能够反映车辆密度的能量和熵特征,经过特征值训练得到车辆拥堵判决阈值,实现道路拥堵检测。试验结果证明,该算法检测准确率高达99%,同时算法的处理速度能够满足工程中的实时性要求。
关键词:交通拥堵;交通视频监控;纹理分析;车辆密度检测
目前道路拥堵是国民关注的焦点问题之一。道路拥堵严重影响市民的正常出行,制约社会经济的发展,损害社会稳定,是亟待解决的问题[1]。针对此问题研究人员提出两种解决手段:一种是根据道路交通流统计特性预测拥堵[2-4];另一种是利用各种传感器采集道路交通流数据,实时判别拥堵状况,常用的检测器有线圈、浮动车等[5-6],这类方法存在成本高、不便于维护、检测率偏低等缺点。
随着交通监控系统的广泛应用,利用图像视频处理技术检测道路拥堵成为研究的热点[7]。基于图像处理的道路拥堵检测方法,通过监控场景背景训练、道路前景检测、特征值提取与训练,对道路拥堵程度进行估计[8-10],其中背景训练环节需要耗费一定时间,而且易受场景变换、摄像头抖动和光线变化等因素的影响,导致拥堵检测既耗时又不精确。
而现实中,实时精确地获取道路拥堵状况是有效缓解拥堵的关键前提。本文利用道路监控摄像头获取图像数据,提出一种基于纹理特征的道路拥堵实时检测算法,以实现各种场景中车辆密集程度的准确识别。
1图像纹理特征与道路拥堵
纹理是图像的一种视觉特征,是由纹理基元按照某种统计规律或确定性规律排列组成,纹理区域内各部分具有大致相同的结构。纹理特征不依赖于颜色或亮度,是所有物体表面共有的结构[11]。换言之,若图像中的目标体型统一且按某种方式规则排列,即说明该图像具有较强的纹理特征;反之,若图像中目标大小不一,且随机排列,该图像的纹理特征便不明显。如图1所示,图1a)对角线方向上具有平行的纹理,图1b)则是形状相同的纹理基元规则排列。
纹理特征常被用来表征图像中群体目标的密集程度,如人群、鱼群或其他种群[12-13]。如图1c)所示,密集的人群出现在同一场景,具有近似规则的纹理特征。人数越多,纹理特征越明显。目前,基于纹理特征的人群密度估计已成为一种常用手段。而对于道路交通图像,也可考虑利用纹理特征估计车辆的密集程度。汽车虽然有大小,但基本都具有长方体的外型,若图像中密集的车辆按车道线先后行驶,该图像的有车区域也具备较明显的纹理特征。如图1d)所示,大量车辆在桥上行驶,不同车道之间易于区分,则该图像中沿车道线方向的纹理特征就非常明显,因此,可通过选定有车区域,然后提取纹理特征来估计道路的拥堵程度。
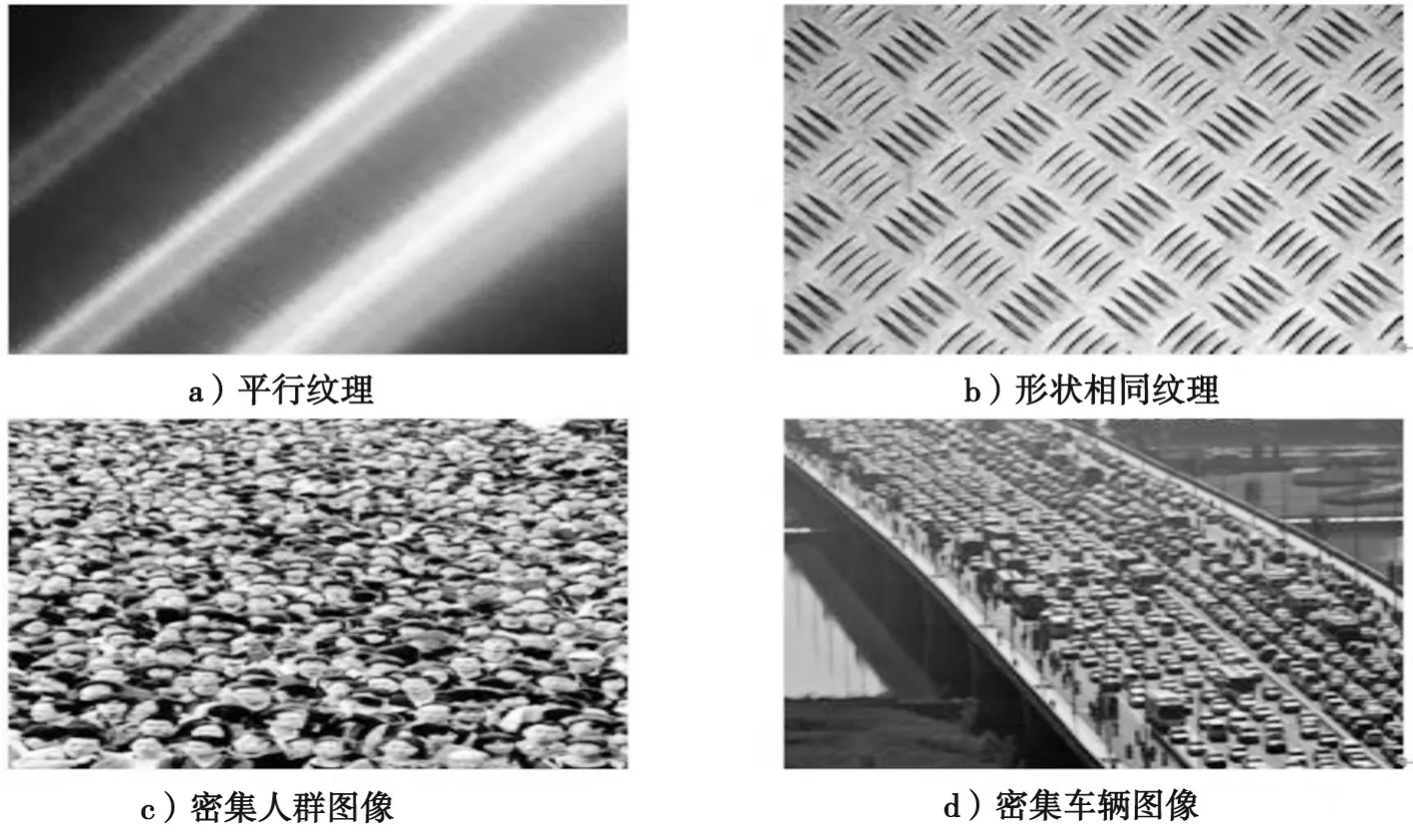
图1纹理特征明显的图像
本文旨在研究利用图像纹理分析技术检测有车区域的车辆密度,对于路面无车的情况不是本文的研究内容。
为了量化图像的纹理特征,算法分为4类:基于统计分析、基于模型、基于信号处理和基于结构分析的方法。其中,最常用也最便捷的是基于二阶统计分析的灰度共生矩阵( GLCM)方法[14]。灰度共生矩阵反映了图像二阶组合的条件概率分布,描述图像中沿水平、垂直或对角线方向θ上,相隔指定距离d的像素对( i,j)在图像中的出现概率。不同角度θ的GLCM反映图像上不同方向的纹理。GLCM的计算复杂程度与图像的灰度级有关,如果图像灰度级为256,则相应的GLCM的大小为256×256。从这样的GLCM中提取特征,其计算量较大。一般采用先降低图像灰度等级,再计算GLCM,常用的GLCM大小为8×8或16×16。
图2显示了8×8 GLCM的计算方法,其中θ=0°,d=1,即统计原始图像中水平方向上,相距1个像素的像素对出现的次数。图2a)为原始灰度图像,图像灰度等级为8,图2b)为相应的GLCM,尺寸为8×8。原始图像中取值为( 1,1)的像素对出现次数为1,则GLCM中第1行第1列元素的值为1。同理,原始图像中( 1,2)像素对出现次数为2,则GLCM中第1行第2列元素值为2。进而通过遍历图像可得到原始图像中所有像素对的统计结果。
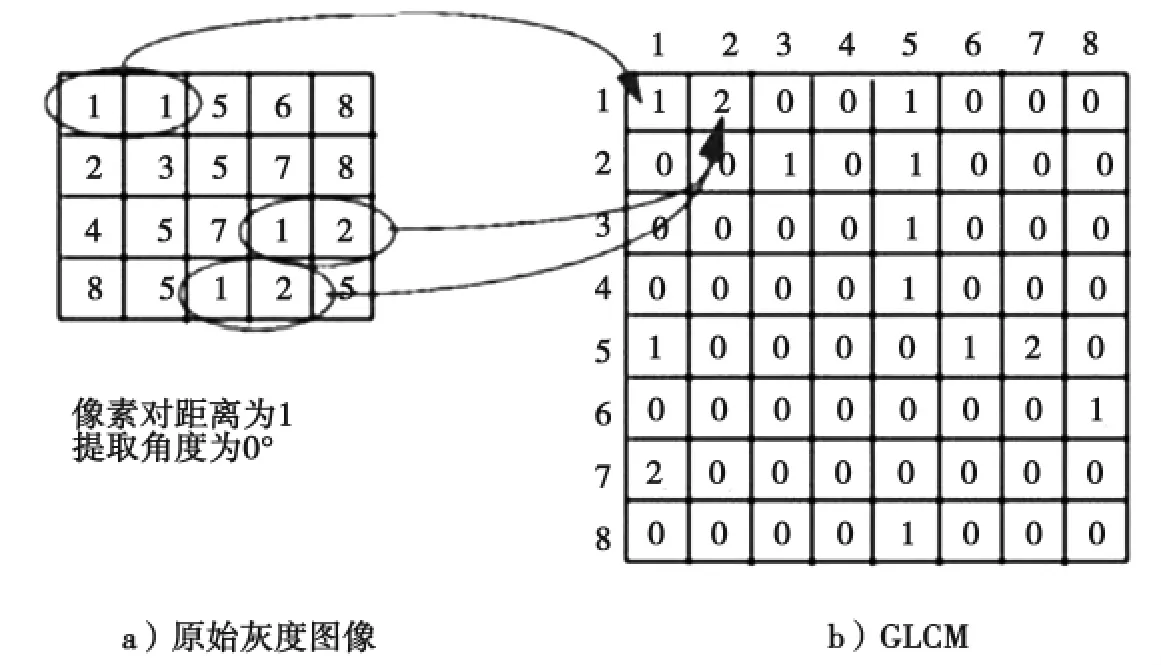
图2生成8×8的GLCM
从GLCM中可提取出十几种特征量,分别表征不同的纹理特征,进行群体目标密度估计时要选取合适的特征量。本文选取能量和熵两种特征量来估计道路拥堵程度,能量特征反映了图像纹理的粗细程度,粗纹理图像的能量特征值大;熵特征反映图像GLCM的分布均匀程度,熵特征值越大[15],GLCM分布越均匀。若图像中车辆密集地沿车道线排列,如图1d)所示,则该图像的纹理结构细小,相应地能量特征值就小;反之,若图像中车辆稀少,其纹理结构粗大,能量特征值就大。如图像中车辆数目较多,图像的灰度直方图呈均匀分布,相应地熵特征值便大;反之,图像中车辆稀少,直方图分布无规则,熵特征值便小。因此,可以通过计算有车区域的GLCM,并提取熵特征值和能量特征值来估计车辆拥堵程度,熵值小、能量特征值大,说明车辆稀少,通行顺畅;熵值大、能量特征值小,则说明车辆密集,会出现拥堵。
2基于纹理分析的道路拥堵快速检测
本文算法包括车辆区域标定、GLCM计算、特征值提取与训练、道路拥堵判别。
2.1车辆区域标定
人机交互的道路拥堵快速检测方法,即在监控场景中先人为标定检测区域,然后利用纹理分析方法检测标定区域的拥堵程度。此种做法不仅避免了背景训练的耗时,而且操纵者能根据现场情况方便地选择感兴趣的区域。标定后,有车区域保留原始灰度值不变,其他区域灰度值置零,表示为背景。
2.2 GLCM计算
标准的灰度图像有256个灰度级,对应的GLCM尺寸为256×256。实际中,计算这样尺寸的GLCM既费时又无必要。众所周知,车身颜色大多是单一或有限的几种,因此成像后车身区域的灰度值应取单一值或数值连续的几个值。但由于光线反射的缘故,实际成像后,车身区域的灰度值有较大的取值范围,进而导致GLCM的直方图分布比真实情况更均匀,提取的纹理特征量也不能真实地反映有车区域的密集程度。通过灰度级降级可解决该问题。将256色灰度图像降级为32色或16色,则原本取值范围较大的车身区域,降色后取值范围减小甚至单一,对应的GLCM的直方图分布即能真实反映车辆的密集程度。
根据场景的光照程度选择不同的降色。若光照充足,则车身灰度值取值范围较大,此时选择较低的降色等级,如16色。若光照不充分,车身灰度值取值范围较小,应选择较高的降色等级,如32色。降色后可计算对应的GLCM。如图2所示,先明确指定方向θ和指定距离d。通常,d设定为1,即计算相邻的像素对的出现概率。θ取值为0°、45°、90°和135°,即分别统计水平、垂直和对角线等方向上的纹理。如此,本方法即可适用于从不同角度拍摄的道路场景图像。降色后图像中灰度值为零的区域代表背景,非零区域表示前景。而在进行纹理分析时,背景区域不在分析范围之内,应予以去除。因此在计算出4个方向的GLCM之后,其中的第1行和第1列将被去除,因为第1行和第1列表示相邻的像素对中至少有1个灰度值为0的统计结果,即图像中的背景区域统计结果。经过该步处理,GLCM的尺寸减小。若原始为32×32,处理后尺寸为31×31;若原始为16×16,处理后尺寸为15×15。
2.3特征值提取与训练
经过计算,得到0°、45°、90°和135°4个归一化的GLCM矩阵,提取能量特征值Sg和熵特征值Sp,计算式为:
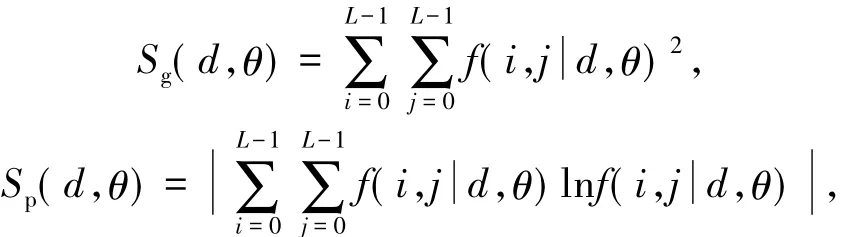
式中: f( i,j)为GLCM中第i行第j列的元素值; L为GLCM的列数或行数。
因此,可得到特征向量

试验结果显示Sg数值很小,比Sp低一个数量级,为此对能量特征进行处理,得到处理后的新的能量
特征值Sg'为:

处理后新的能量特征值Sg'提高1个数量级,而且与车辆密度呈正比关系,即车辆越密集,Sg'值越大。
此时,特征向量变为:

随后,对8个特征值分别进行算术平均再求和,得到最终的特征值

2.4道路拥堵判别
利用最终特征值S表征道路车辆的密集程度,S越大则道路越拥挤,反之道路越畅通。本文通过大量样本训练得到判别阈值ST,当当前图像的特征值S>ST时,说明该图像中车辆密集,易出现拥堵;否则说明图像中车辆稀疏,通行顺畅。
3试验与分析
本文算法在2.6 GHz CPU、4 GB内存的Win7系统下进行仿真试验,采用MatLab语言编码。试验数据包括自拍视频图像和下载视频图像两部分。实现步骤如下:
1)选取100幅包含密集车辆的图像和100幅包含稀疏车辆的图像作为样本集,如图3所示,其中图a)、b)图包含密集车辆群,图c)、d)包含稀疏车辆群。
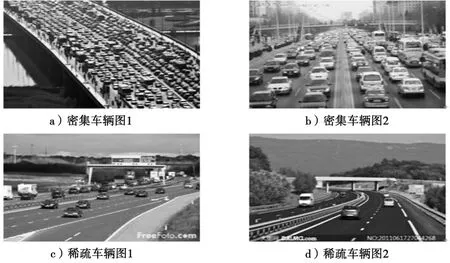
图3试验样本示例
2)进行车辆区域标定,图4为标定结果的示例图。
3)进行灰度级降级和4个方向的GLCM计算,并从中提取能量和熵特征,并利用式( 1)、( 2)得到最终的特征值S。
此时,得到样本数为200的样本集合{ Si},i∈{ 1,2,3,……,200}。试验中对所有特征值取整数。经过统计后结果如图5所示。图中稀疏车辆特征值取值范围为[2,7],密集车辆特征值取值范围为[6,15]。
4)进行道路拥堵程度判别,由图5可以看出,稀疏车辆和密集车辆的特征值有非常明显的区别,2条曲线交叉点为6.5,因此选择ST= 6.5作为判决阈值,进行道路车辆拥堵程度判别,即: S≤6. 5时,道路通畅,S>6.5时,道路拥堵。
随后,对100幅包含有稀疏和密集车辆群的图像进行测试,结果显示本文算法的检测准确率高达99%。
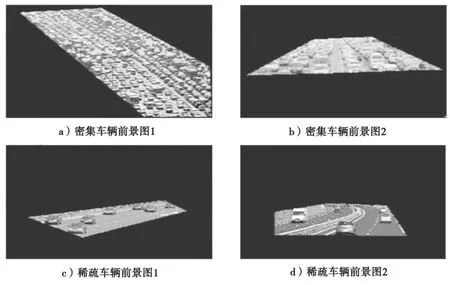
图4车辆区域标定结果
为验证本算法的实时性,特选取了一段路口监控视频,帧率为25帧/s,时长1 min,共计1 508帧图像。因为场景固定,只需进行1次有车区域的标定。结果显示,利用本文算法处理该段视频用时6 117 ms,即图片处理速度为4.056帧/ms,该速度完全可以满足工程中的实时要求。
4 结语
针对日益严重的城市道路拥堵提出一种实时的车辆拥堵检测算法,主要有两点创新:
1)提出人机交互的车辆区域标定,替代当前通用的背景训练,大大加快了处理速度,同时操纵者可根据道路实际情况任意选择感兴趣的区域进行检测。
2)提出利用车辆图像的纹理特征估计拥堵程度。经计算验证,从有车区域提取的能量和熵纹理特征值与该区域的拥堵程度呈正比关系,而且拥堵区域和通畅区域的特征值区别明显。
通过反复试验,证明本算法检测准确率高达99%,且满足实时处理需求。本算法应用于当前的道路视频监控系统后,可为交通管理者快速精确掌握道路通行情况提供可靠信息。
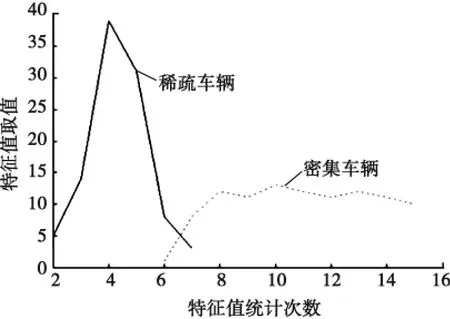
图5样本特征值统计结果
参考文献:
[1]李佳芯,陆化普.城市拥堵进入新阶段[J].道路交通管理,2010( 12) : 48-49.
[2]陈阳舟,田秋芳,张利国.基于神经网络的城市快速路交通拥堵判别算法[J].计算机测量与控制,2011,19( 1) : 167-169.
[3]陈小红.城市道路交叉路口的拥堵预测[J].华南理工大学学报(自然科学版),2010,38( 7) : 72-77.
[4]高艺.基于一次拥堵的城市交通拥堵综合评价方法研究[D].北京:北京交通大学,2011.
[5]薛忠林.基于单线圈的快速路拥堵自动检测及车辆诱导[D].北京:北京交通大学,2008.
[6]张志平,汪向杰,林航飞.基于浮动车数据的高速公路拥堵检测方法[J].交通信息与安全,2012( 6) : 95-99.
[7]王丹颖.基于视觉的高速公路匝道口检测监控技术的研究[D].杭州:浙江工业大学,2012.
[8]王川童.基于视频处理的城市道路交通拥堵判别技术研究[D].重庆:重庆大学,2010.
[9]赵有婷,李熙莹,佘永业.基于视频全局光流场的交通拥堵检测[J].计算机应用研究,2010,27( 11) : 4355-4357.
[10]黄磊磊,汤一平,孟焱.基于机器视觉的道路拥堵状态检测的研究[J].小型微型计算机系统,2014,35( 1) : 148-153.
[11]LIU Li,KUANG Gangyao.Overview of image textural feature extraction methods[J].Journal of Image and Graphics,2009,14( 4) : 622-635.
[12]ZHAN B,MONEKOSSO D N,REMAGNINO P,et al.Crowd analysis: A survey[J].Machine Vision and Application,2008,19( 2) : 345-357.
[13]李炜.群体目标动态分析研究[D].济南:山东大学,2011.
[14]JACQUES Junior,MUSSE S R,JUNG C R.Crowd analysis using computer vision techniques[J].Signal Processing Magazine,2010,27( 5) : 66-77.
[15]HARALICK R M,SHANMUGNM K.Textural features for image classification[J].IEEE Transactions on Systems,Man,and Cybernetics,1973,3( 6) : 610-621.
(责任编辑:杨秀红)
A Fast Approach of Road Congestion Detection Based on Image Processing
LI Wei
( School of Traffic and Logistics Engineering,Shandong Jiaotong University,Jinan 250023,China)
Abstract:This paper proposes a fast detection algorithm for urban road traffic congestion based on image processing technology.Firstly,to speed up the processing and freely select a vehicle area,it puts forward a vehicle area detection with human-computer interaction.Then,by using the difference of texture features between congestion image and unobstructed image,it presents the vehicle density estimation based on the texture analysis.Through the image grayscale relegation,gray level co-occurrence matrix calculation and feature extraction,the energy and entropy features that can reflect vehicle density are obtained from the vehicle area.After the feature training,the decision threshold could be obtained and traffic congestion could be carried out.Experimental results show that the accuracy of algorithm is as high as 99%,and the processing speed could satisfy the real-time requirement in engineering.
Key words:traffic congestion; traffic video monitoring; texture analysis; vehicle density detection
作者简介:李炜( 1982—),男,山东聊城人,讲师,工学博士,主要研究方向为图像视频处理.
基金项目:山东省自然科学基金项目( ZR2014EL035)
收稿日期:2015-04-10
DOI:10.3969/j.issn.1672-0032.2015.02.003
文章编号:1672-0032( 2015) 02-0011-06
文献标志码:A
中图分类号:U491.265
