基于超宽带的室内定位技术研究综述
2016-01-12杨狄,唐小妹,李柏渝等
基于超宽带的室内定位技术研究综述
杨狄,唐小妹,李柏渝,王飞雪
(国防科技大学电子科学与工程学院卫星导航定位技术工程研究中心,长沙 410073)
摘要:超宽带(UWB)技术凭借其时间和空间分辨率高、保密性好、穿透性强、定位精度高等优点,为高精度室内定位提供了很好的室内定位解决方案。本文首先从超宽带技术特性出发,对适用于室内定位的算法及可行性做了概述和对比。然后针对适用于UWB室内定位的到达时间(TOA)算法进行详细介绍和分析。最后将业内对于UWB室内定位性能的研究进行归纳和总结。
关键词:室内定位;超宽带(UWB);TOA
doi:10.13442/j.gnss.1008-9268.2015.05.007
中图分类号:TN967.1
文献标志码:A
文章编号:1008-9268(2015)05-0034-07
收稿日期:2015-06-15
作者简介
Abstract:Ultra Wideband (UWB) technique,with its numerous advantages of high spatial resolution,good secrecy,strong penetrability and excellent location accuracy,provides a widely used solution in indoor localization.From the point of UWB tags used in the indoor localization,there is a brief introduction and comparison about the primary UWB-based indoor localization algorithms and their feasibility.Two kinds of TOA algorithms fit for UWB-based indoor localization are presented in detail.The performance of TOA algorithms fit for UWB-based indoor localization which have been studied is summarized.
0引言
全球卫星定位系统(GPS)具有应用范围广、定位精度高等特点在室外已经可以完美提供定位服务解决方案。然而,由于障碍物遮挡,墙壁阻隔等因素存在以及室内环境极为复杂,GPS无法实现室内精确定位。近年来,随着近距离无线通信和移动网络技术发展迅速,基于位置的服务(LBS)越来越受到重视[1]。据统计,人类近80%的时间是活动在室内,因此对室内高精度定位的研究成为热点。
为了克服GPS的定位缺陷并实现在复杂室内环境中的精确定位,国内外研究人员在室内定位中引入了红外传播技术、WLAN技术、超声波技术、射频识别(RFID)技术、低功耗蓝牙技术、紫蜂(Zigbee)、无线传感器网络(WSNs)技术等多种技术[2]。红外线定位技术原理简单,应用较早,但是仅能直线视距、传输距离较短、易受光线干扰等缺点使其室内定位的效果很差,较为典型的应用系统有Active Badge。超声波技术实现室内定位精度较高,并且抗干扰能力强。然而,构建这种系统需要大量基础设施构建部署,成本过高,典型的应用系统有Cricket.RFID室内定位技术覆盖区域较大、速率高、安全性强、成本低等特点,近年来发展较快。缺点是作用距离近,不具有通信能力,与其他系统兼容性较差。RFID室内定位典型应用系统为LANDMARC.由于近年来无线网络以及手机终端的普及,基于WLAN的室内定位技术兴起。这种定位技术利用现成的无线网络,只需较少的基站,并且系统易于构建。但是这种室内定位解决方案易受电磁干扰,并且易于欺骗,安全性不高。针对室内定位必须满足定位精度高、抗干扰能力强、成本低、功耗低等条件,UWB技术作为一种快速发展的技术,根据美国联邦通信委员会(FCC)对其的定义和应用规范,UWB技术在室内定位中可以获得广泛应用。
1UWB室内定位测距算法的研究
定位技术可以基于测距,也可不基于测距。相比之下,不基于测距的定位技术精度较差,并且需要大量锚点(位置已知的节点)配合。室内定位要求高精度和少锚点,因此一般采用基于距离的定位算法,主要包括基于到达时间(TOA)、基于到达时间差(TDOA)、基于接收信号强度(RSS)和基于到达角(AOA)等。2004年,IEEE发布802.15.4a信道模型,主要为2~10 GHz的超宽带信号在室内住宅和办公室的传播,为评估超宽带测距定位算法性能提供了基础[7]。
基于RSS和AOA的估计算法性能与信号形式无关,因此并不能完全发挥UWB信号GHz带宽的独特优势。AOA估计算法是通过获取目标节点到两个接收机信号的到达角度进行定位,一般运用阵列天线获取方向信息。AOA定位精度高,且不需考虑接收机时钟同步问题,图1示出了AOA定位的理论下界。然而实际运用AOA定位时,需要配置非常复杂的天线系统,不但增加了复杂度,也增加了成本且角度误差对定位精度的影响非常大,如图2所示。RSS估计是将接收信号强度与传播距离的路径损耗建模进行定位,对信道模型依赖性强,多径和环境的变化极大的影响定位精度。图3示了了不同环境下RSS方法估计的最小标准差与距离的关系,如图所示,基于RSS估计方法下,当CM1环境下距离为10 m时,最小标准误差下界已经接近3 m,距离误差已经远远不满足FCC对室内定位精度(小于1 m)的标准。需要说明的是,在图2中,CM1~4分别代表4 m内视距(LOS)环境、4 m内非视距(NLOS)环境、10 m内NLOS环境以及极端NLOS环境,具体参数如表1所示。
联系人: 杨狄 E-mail: yangdiapple@163.com
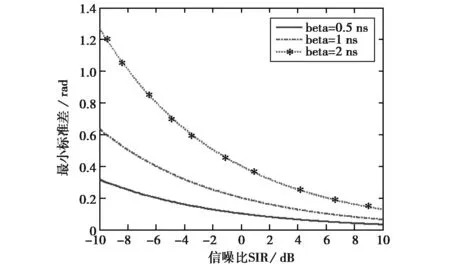
图1 10天线ULA阵AOA定位理论下界
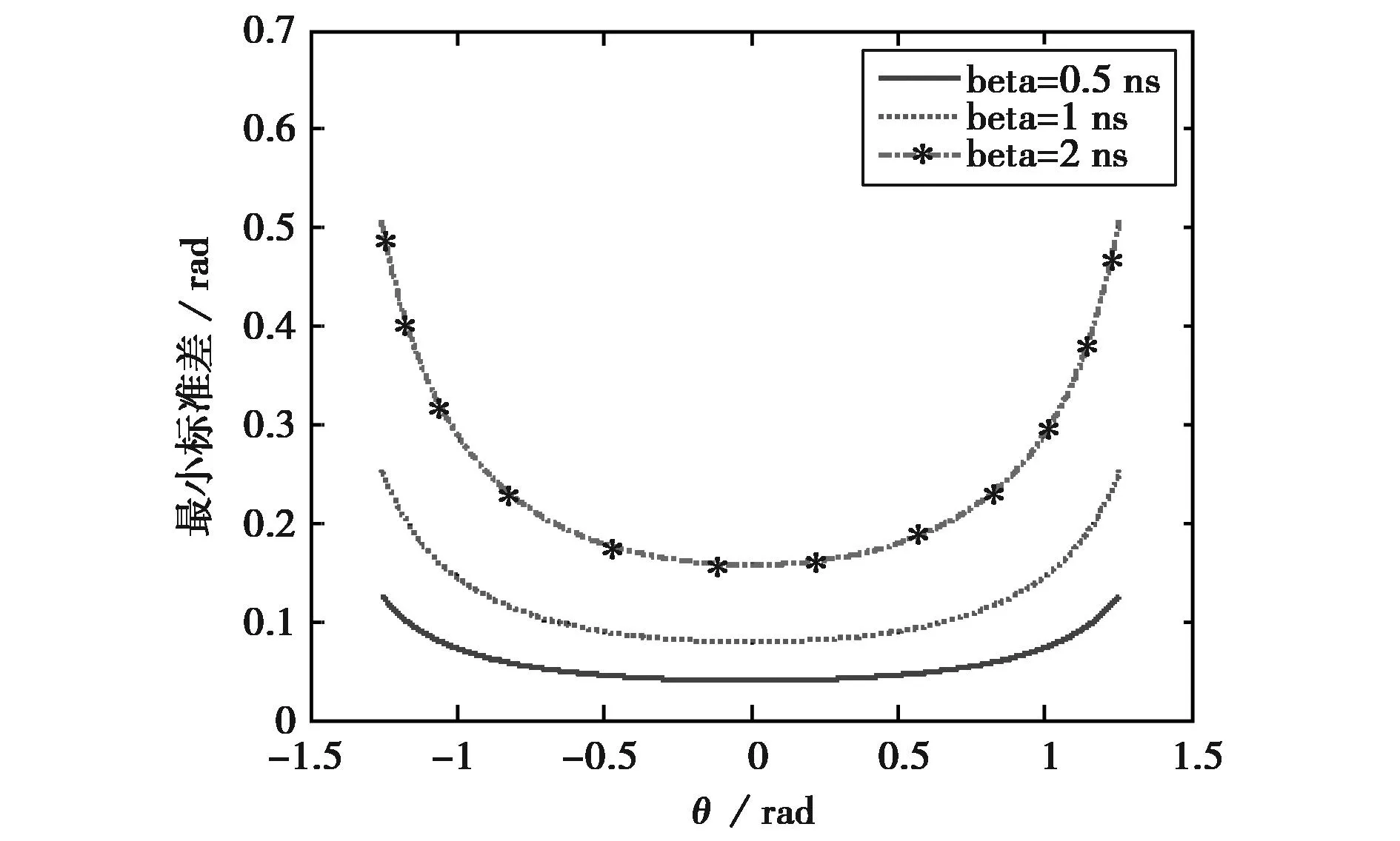
图2 AOA下界与接收信号到达角度的关系
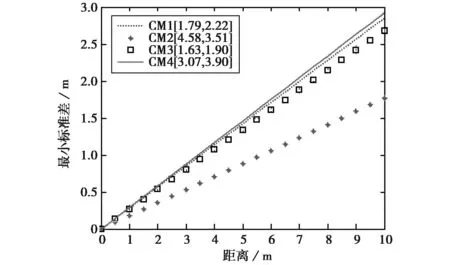
图3 不同环境下RSS定位理论下界
由于UWB信号具有GHz带宽的独特优势,结合TOA测距技术能够充分利用UWB信号时间分辨率高的特点,图4和图5分别示出了TOA定位最小标准差与有效带宽和信噪比关系曲线,从图中可以看出,随着有效带宽和信噪比的增加,TOA估计性能可以达到厘米级。综合上述三种定位算法的克拉美罗下限的研究表明基于到达时间的定位(TOA)最能挖掘超宽带信号的大宽带特性,可以看出,TOA测距技术是最适合于UWB室内定位的。
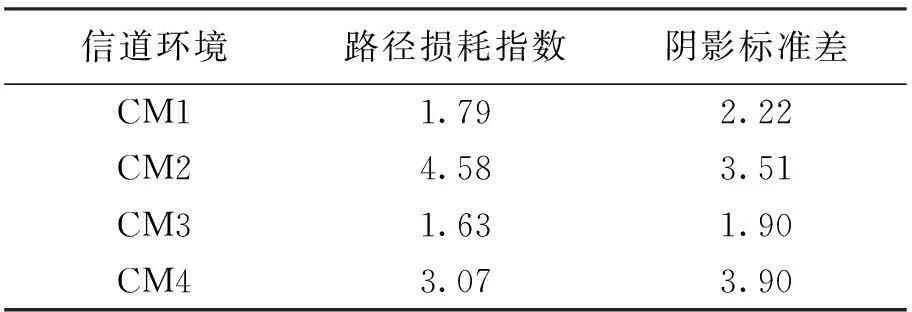
表1 IEEE 802.15.4a信道参数
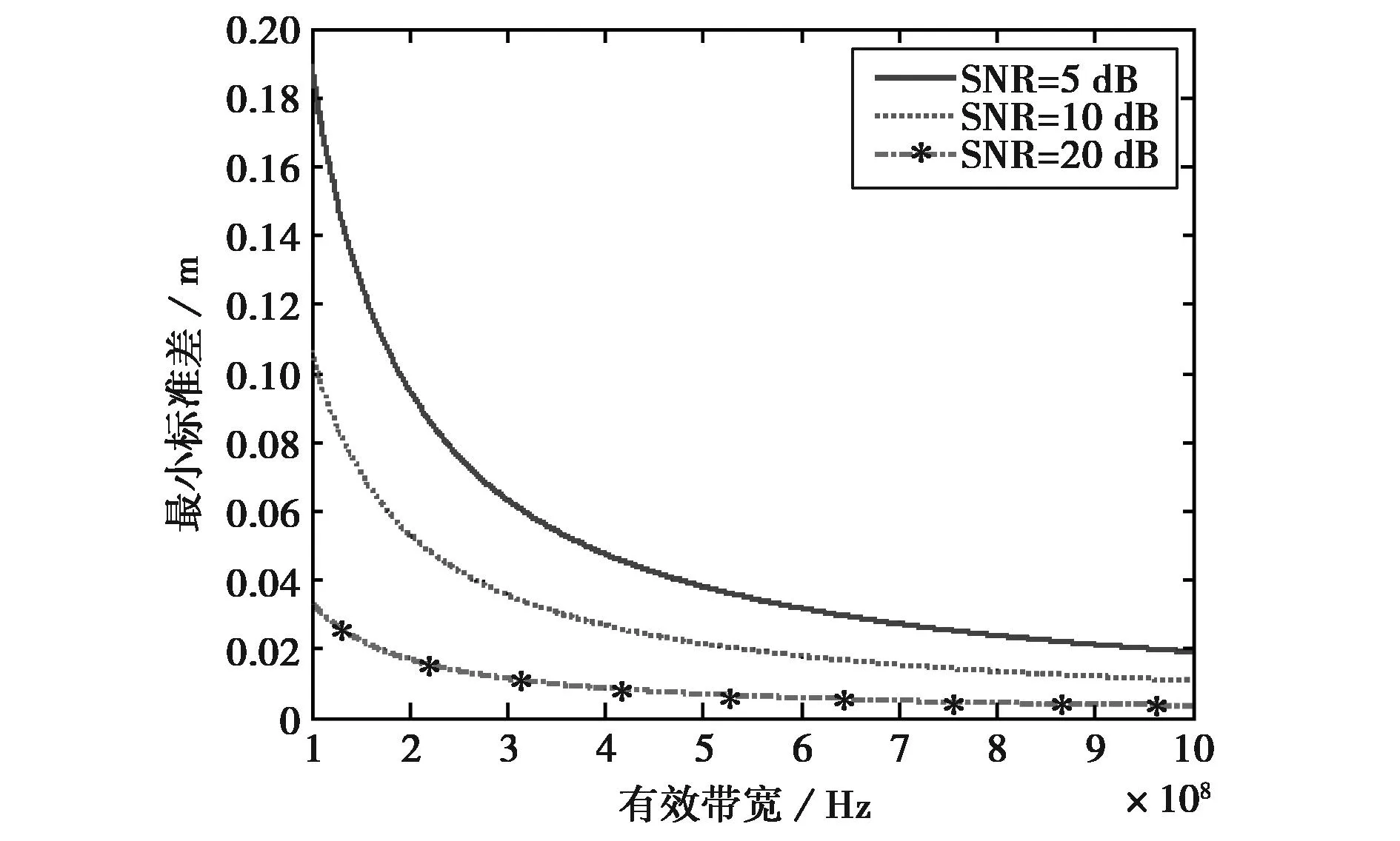
图4 TOA定位理论下界与有效带宽的关系
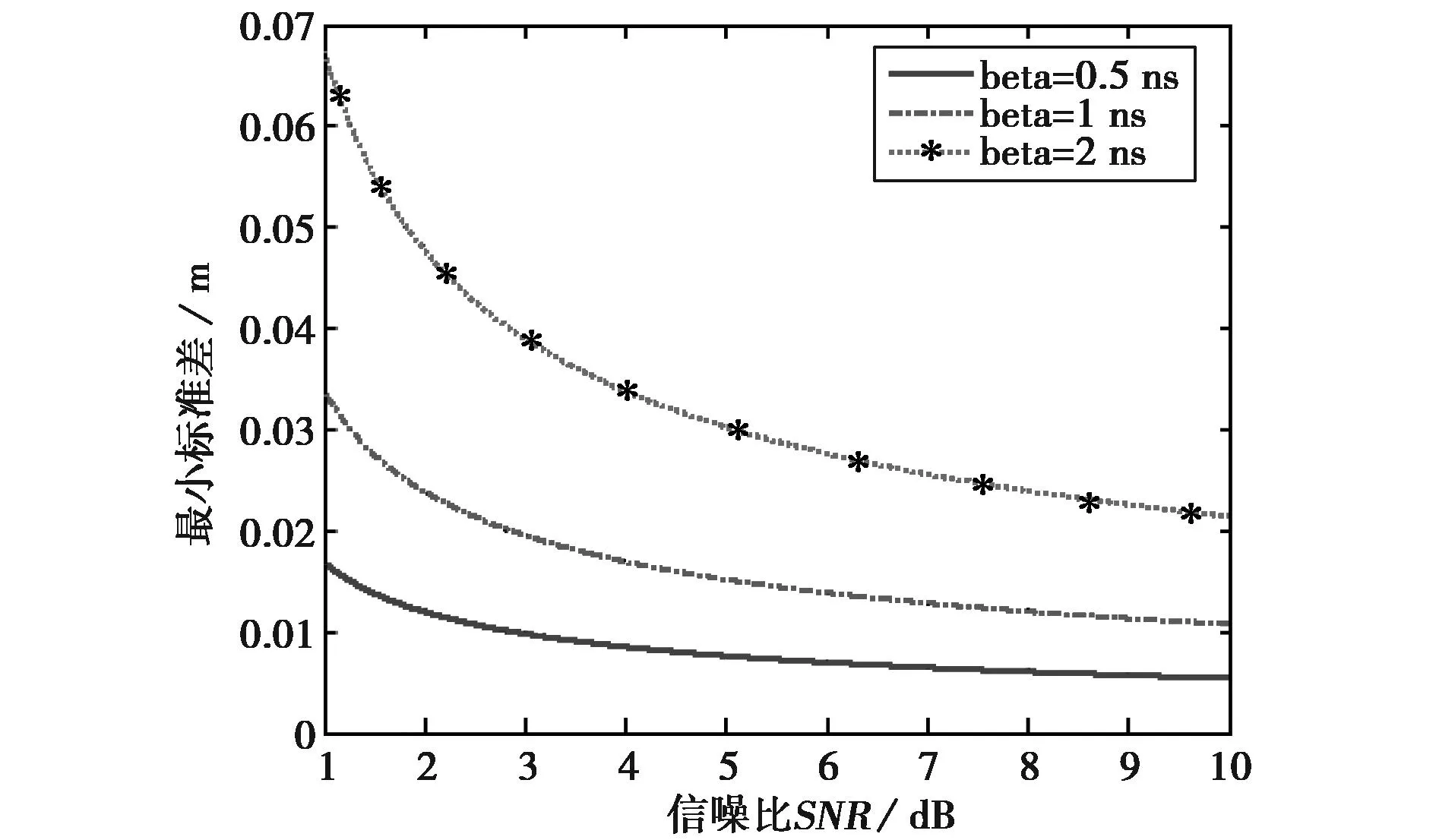
图5 TOA定位理论下界与信噪比的关系
基于UWB的TOA测距算法在近几年得到了广泛研究。根据UWB信号在信道表现出的明显的不同特征,通常将UWB的研究分为两类:LOS环境和NLOS环境。在理想室内视距(LOS)环境下,直达径(DP)通常为接收信号强度的最强径(SP),因此TOA算法对接收信号的峰值的检测可以正确估计出脉冲到达时刻。然而,实际环境中,常有障碍物遮挡,因此对于有障碍物阻挡的非视距(NLOS)环境,DP通常不是SP,穿透障碍物的直达路径能量比后续到达的多径能量小,此时,直接检测峰值会造成很大误差。Pahlavan等人[3]根据接收信号中DP的相对能量及可用性将室内环境分为有明显直达径(DDP)、无明显直达径(NDDP)和无直达径(UDP)三种情况。在DDP环境下,接收机检测到SP即为DP,因此,接收机锁定DP同时准确的估计出TOA.在NDDP环境下,DP在信道中不明显,接收机锁定的SP并不是DP,造成TOA估计误差。在UDP环境下,接收机完全检测不出DP.
TOA算法的目标是实现NDDP环境下对DP的成功检测。DP检测的方法分为两类:一类是相干TOA算法,一类是非相干TOA算法,其中相干TOA算法依靠高采样率、高进度匹配滤波实现,而非相干TOA算法则是基于低采样率、低复杂度的能量检测原理。
Lee等人[4]提出了一种基于匹配滤波的广义极大似然(GML)估计方法检测DP信号,是一种经典的相干TOA算法。测距系统在每个收发器中利用一个相关器和一个高速并行采样器实现在一个时钟周期内完成测距,基于GML的TOA算法过程分析如下:
UWB接收信号可以表示为

(1)
式中: τ1<τ2<τ3<…<τL.参数τd和ad代表DP信号到达时间和强度; s(t)代表宽度为Tp的典型单径信号; 多径数目L事先未知; 噪声nm(t)假设为加性高斯白噪声。
假设信号已完成采样,形式如下:
(2)
(3)
式中:τpeak代表SP信号到达时间;L代表多径数量;τd和ad代表DP信号到达时间和强度,同样的,τn和an代表其他n条径的到达时间和强度,由相关器决定。在式(1)中,δ是被估计参量,GML估计将其余未知参量当做确定量,则δ被估计为
(4)

1) 为了避免在噪声中检测DP失败的概率增大,应当对δ设置一个门限值θδ,使得在信号r(t)上的搜索满足t≥-θδ.
2) 为了保持其他参量的值保持稳定,需要对单径信号强度设定门限θρ,在迭代搜索过程中,如果没有检测到任意单径信号强度满足ρ≥θρ,则搜索停止。
3) 忽略晚于已经检测到的其他径的参量,来提高搜索检测速度。
基于GML估计的TOA算法流程图如图6所示。
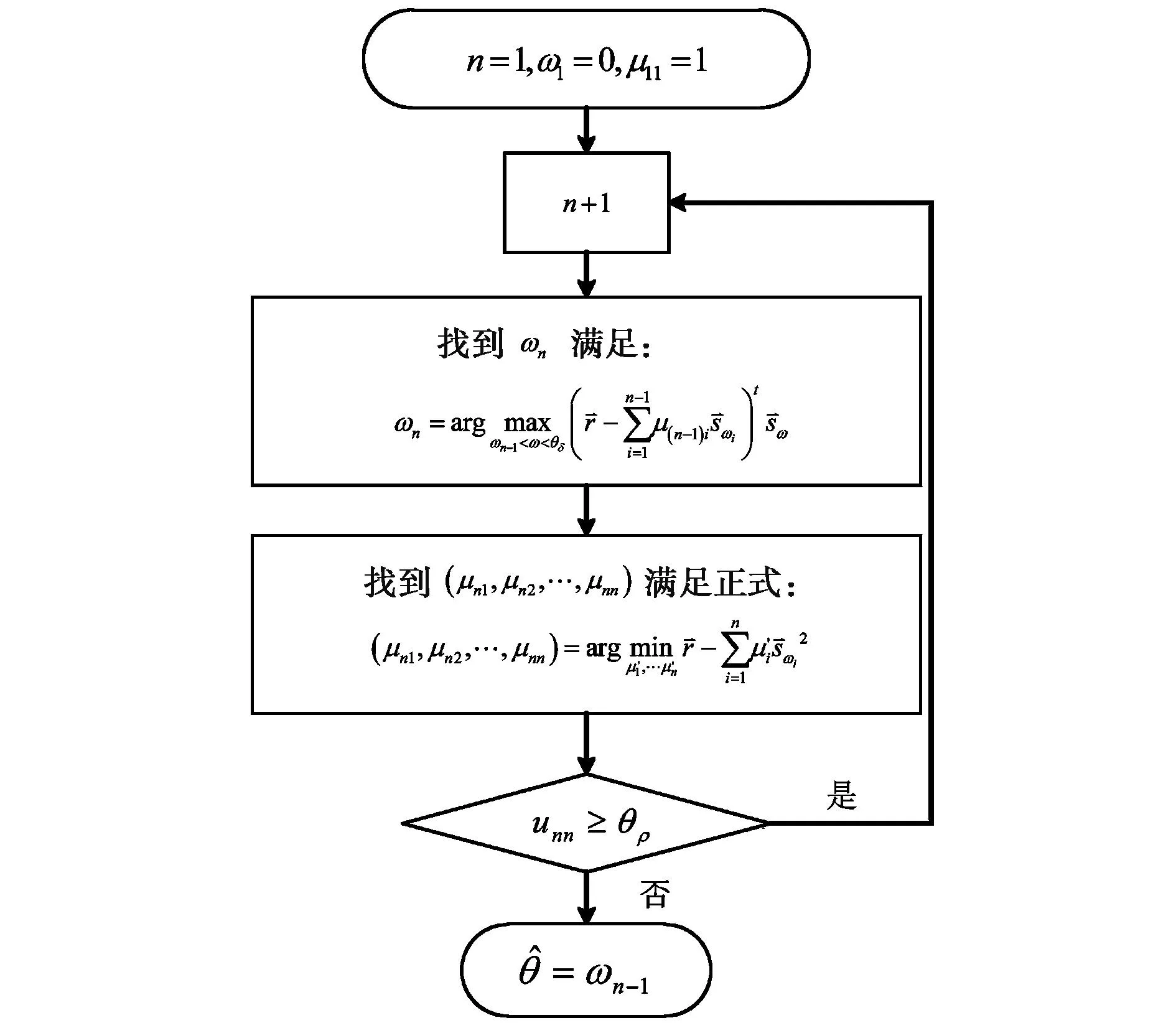
图6 基于GML估计的TOA算法流程图
该算法由于将匹配滤波器峰值作为DP的TOA估计,忽略了SP后的路径包含的信息,这些信息可以很好的增强检测SP的准确性。文献[5]证明了直接将匹配滤波器峰值作为DP的TOA估计,算法仅仅适用于全向收发天线的LOS环境。针对密集多径环境下的相干TOA算法,文献[6]以及文献[7]提出了密集多径环境下的低复杂度的ML检测方法。
由于相干TOA算法涉及到多次相关峰值检测,因此算法复杂度高。与之对比,非相干TOA算法则是基于能量检测,确定DP的过程具有低采样率和算法低复杂度的优势。较为经典的判断DP的解决方案分为三类:选择值最大的能量块(MES)算法、门限比较(TC)算法和峰值能量回溯门限比较(MES-SB)算法。
Guvenc等人[8-9]将用于TOA算法的采样信号事先通过平方器,然后通过MES、TC和MES-SB三种解决方案精确检测DP,并且证明了在IEEE802.15.4a信道模型下基于能量检测(非相干)TOA算法在分米级测距准确率达到90%.
接收信号在能量检测后采样如图7所示,将接收信号经过平方器后进行符号速率的积分采样,通过设计合适的传输波形和使用适当的数量采样点可有效提升采样速率。
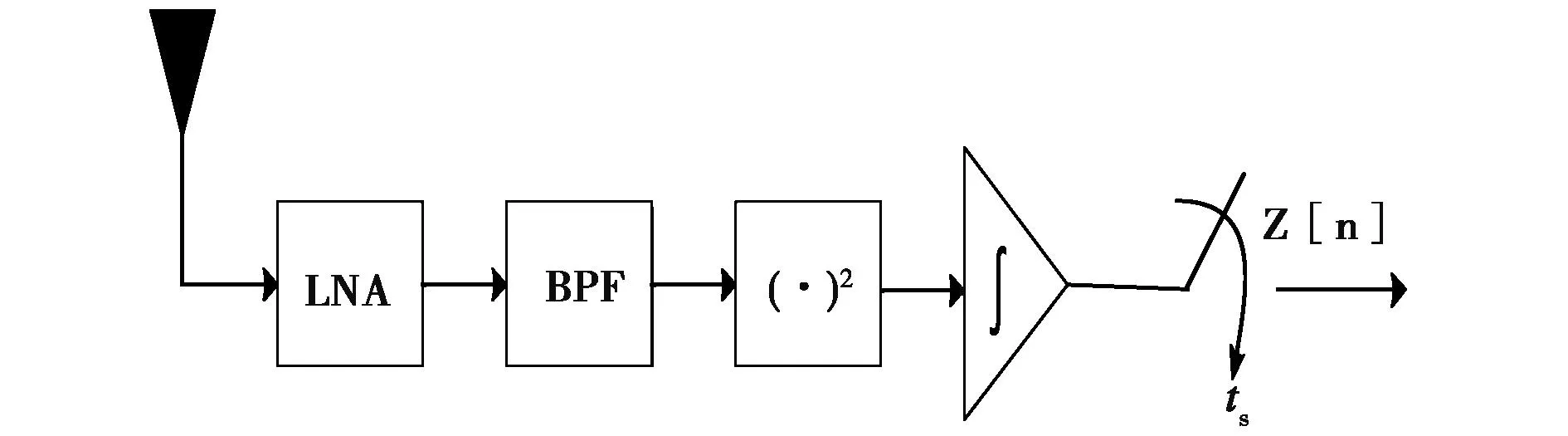
图7 能量检测后对接收信号采样
其中基于MES、TC和MES-SB三种解决方案的TOA估计(图8所示)如下:
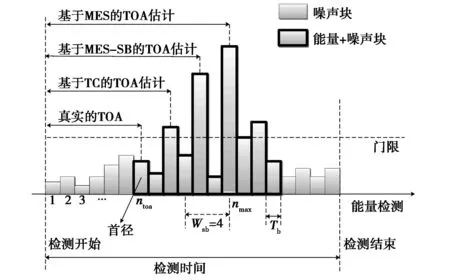
图8 基于能量检测的TOA估计
1)MES
选择最大能量输出是一种最简单的TOA估计方法,运用MES方法对TOA的估计:
=(nmax-0.5)·Tb.
(5)
如式(5)所示,将能量块的中心判为TOA的估计。如图3所示,最大能量块并不是第一块能量,因此MES方法容易将只含噪声的能量判为最大能量,从而出现误判,造成TOA估计错误[10]。
2) TC
采样信号可以估计为一个近似的门限值,通常将第一个超过门限值的采样信号表示为TOA的估计值
(6)
式中:ξ是由接收信号统计特性决定的门限;当采样到最大能量和最小能量,ξ可以归一化表示,如图9所示,具体为
(7)
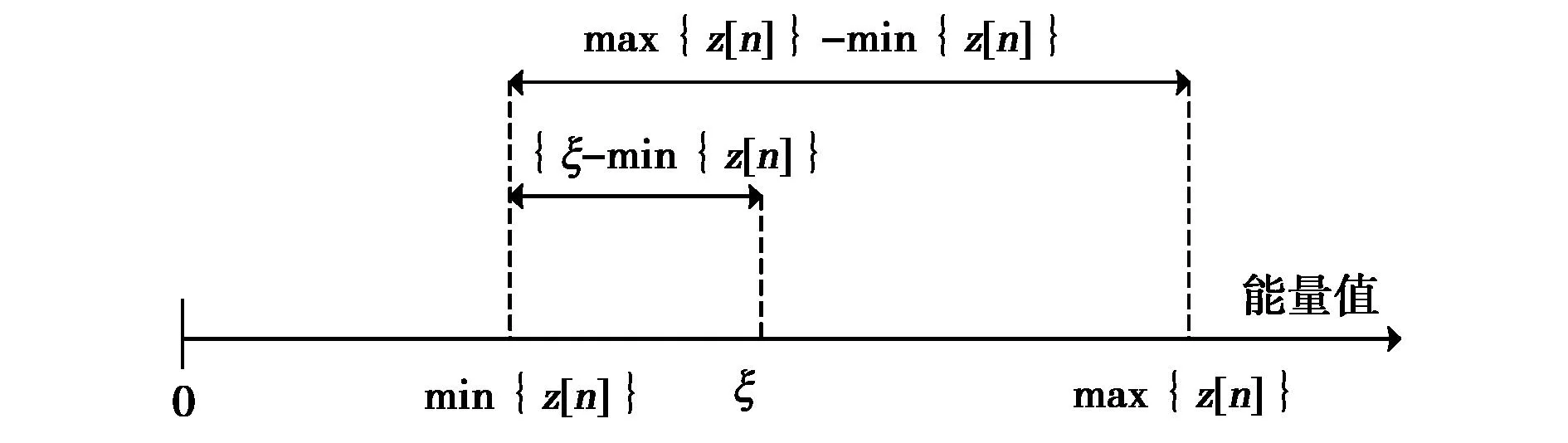
图9 基于最大和最小能量块的门限归一化
3) MES-SB
为了提高TC解决方案在低信噪比下的性能,能量采样应该在最大能量到达之前被搜索到。MES-SB方法估计TOA如式(8)所示
(nmax-ωs b-1)]·Tb,
(8)
式中:
z[nmax-ωs b+1]…z[nmax]];
式中,ωs b为采样的搜索能量回溯窗,其由信道的统计特性决定,表示为
(9)
式中,Ws b表示为一个时间周期内窗的大小。MES-SB方法对TOA估计的精度受MES方法精度的限制。
可见,无论是相干TOA算法还是非相干TOA算法,关键都在于选择合理的检测门限。最优门限值的选择非常重要,门限过小,噪声导致过大的估计虚警,将噪声判为DP;门限过大会降低检测概率,出现漏检。Dardari等人[11]通过对最优门限的研究,指出最优门限值的选择与信噪比、收发距离和LOS路径环境有很大关系。
结合相干与非相干TOA算法的优势与缺点,Gezici等人[12]提出一种折中的TOA算法,即先基于能量检测确定DP所在能量块,然后在该能量块中利用相干检测确定DP.该方法联合利用了相干检测高精度和非相干检测算法低复杂度的优势,是现有硬件条件下的一个较好的解决方案。
利用UWB信号实现精确定位目前主要依靠TOA测距算法完成[13]。基于TOA算法的UWB定位的最大缺点是需要精确的节点时间同步,然而实现相对困难。基于TDOA的测距方法则可以弱化同步要求。文献[14]和[15]详细研究了基于TDOA的测距定位,通过设定一个额外的基准参考点,获得其余参考点到该节点的传播时间差,利用双曲线模型进行定位。
事实上,受到室内复杂环境、参考节点的数目和相对位置的影响,TOA定位算法出现误差,三边测量法得不到精确解,目标节点的位置出现模糊,此时就需要对目标节点的位置进行准确估计。
Doherty等人[16]根据距离等信息量估计出目标节点可能存在的区域对应的矩形区域,并判定对应矩形区域的质心即为所估计的目标节点位置。Fang等人[17]详研究了在较少的参考节点环境下估计目标节点位置坐标的问题,并详细推导了估计表达式。
上述直接利用距离信息对目标节点位置进行估计,方法简单,但精度低。为了实现高精度位置估计,业内常用的方法是充分利用冗余参考节点信息对定位结果进行优化。主要方法为利用极大似然估计进行优化,优化的准则包括LS[18]方法,WLS[19]方法和ML[20]方法等。
2UWB室内定位测距性能的研究
相比于通信系统使用误码率描述系统性能,UWB室内定位系统的性能衡量标准为距离误差[10]。由于测距误差的产生主要由多径和NLOS环境影响造成的,因此,对UWB室内定位测距性能的研究自然分为在LOS环境和NLOS环境。
在LOS环境下,TOA测距误差主要为多径误差。由于多径的影响,使得接收机不能准确判断接收信号是直达信号还是多径信号,造成TOA估计时相关峰发生偏移,进而产生TOA距离估计误差。UWB信号虽然具有很大带宽,理论上具有很高的多径分辨能力,一定程度上可以减弱多径对直达径检测的影响,但是受限于现实系统,依然存在多径误差。Celebi和Guvenc等人[21]总结出LOS环境下影响接收信号TOA估计的因素包括接收机结构(信道冲击响应CIR和能量块EB等)、测距算法(相干或非相干)以及信道的统计特性(直达径DP和最强径SP的相位和幅度及其时延的统计特性等)。
室内环境复杂多变,NLOS传播现象较为普遍。Lee等人[22]指出在NLOS环境下,由于障碍物等遮挡,产生出反射、折射、投射或绕射信号,使得接收机对直达径信号的检测形成巨大干扰,使得在TOA估计中产生额外时延,造成估计误差。具体的讲,由于NLOS环境的特殊性,接收信号的直达径(DP)往往不是最强径(SP),因而利用相关峰对TOA进行估计会产生多径误差,即使正确的检测到了DP到达时间,由于NLOS环境影响,产生的时延大于收发节点间直线时延,使得位置估计产生偏差。
大量学者针对UWB室内定位测距的性能进行了相关实测。Alavi等人[23]对带宽为3~8GHz的UWB信号分别在办公室、厂房楼层、住宅等4种建筑下的性能进行2 934次实测,发现测距误差与收发器位置相关并且是首条直达径(FDP)能量的函数,与建筑种类无关。Alsindi等人[24]结合实际环境,分别在住宅区、办公室和工厂楼层的环境下对定位性能进行实测,并详细研究了传播信道和系统参数多TOA测距新能的影响,指出TOA测距的覆盖范围与系统带宽成反比,同时受到周围环境影响很大,并给出了有无DP时不同环境的距离误差分布。
Bellusci等人[25]指出距离误差很大程度上由系统带宽、收发器相对位置影响。针对3.1~10.6GHzUWB信号传播实测,收发机距离在LOS环境下为2~15m,NLOS环境为3~12m,总共进行600次测量,通过对统计数据进行分析,指出LOS环境下距离误差服从高斯分布,NLOS环境下距离误差服从高斯分布和指数分布之和。在LOS环境下,当信号带宽足够大,测距精度可达厘米级;虽然在NLOS环境下由于多径以及额外时延的影响,精度相比LOS环境有所下降,但是定位性能依然良好。
Denis等人[25]主要研究了UWB定位系统在NLOS环境下的性能,指出信道的影响是测距误差的主要来源;对于UWB系统来说,检测首条直达径(FDP)较检测最强径(SP)精度更高。通过分析LOS、NLOS和NLOS2环境下的定位性能,即使在最恶劣的NLOS2的环境里,距离估计误差不超过3m.特别是当收发节点距离小于12m时,FDP误差可完全控制在1m以内。
3结束语
本文首先概括了适用于UWB室内定位的算法并从克拉美罗下界的角度分析了各种算法的优缺点。由于TOA算法可以充分发挥UWB信号的优势,本文重点将业内基于TOA的UWB室内定位测距方法极其性能进行梳理和总结,并列举了两种典型的相干、非相干TOA算法。
未来基于UWB的室内定位,对系统的实用性、精确度等提出了更高要求,虽然UWB室内定位精度可达厘米级,但是由于其可兼容性不好,需要特定的设备,因此单一基于UWB的定位技术无法满足普通大众用户应用需求。因此对各种定位系统和算法的融合,如UWB与WSNs的融合,将是一大发展趋势。
参考文献
[1]DENGZhongliang,YUYanpei,YUANXie, et al.Situationanddevelopmenttendencyofindoorpositioning[J].ChinaCommunications,2013,10(3):42-55.
[2]刘鹏,卢潭城,高 翔.基于射频识别的室内定位技术综述[J].太赫兹科学与电子信息学报,2014(2):195-201.
[3]PAHLAVANK,KRISHNAMURTHYP,BENEATA.Widebandradiopropagationmodelingforindoorgeolocationapplications[J].IEEECommunicationsMagazine,1998,36(4):60-65.
[4]JOON-YONGLEE,SCHOLTZRA.RanginginadensemultipathenvironmentusinganUWBradiolink[J].IEEEJournalonSelectedAreasinCommunications,2002,20(9):1677-1683.
[5]CHUNG,WC,HADS.Anaccurateultrawideband(UWB)rangingforprecisionassetlocation[C].//IEEEConferenceonUltraWidebandSystemsandTechnologies,Reston,USA,2003:389-393
[6]WINMZ,SCHOLTZRA.Characterizationofultra-widebandwidthwirelessindoorchannels:acommunication-theoreticview[J].IEEEJournalonSelectedAreasinCommunications,2002,20(9):1613-1627
[7]RABBACHINA,OPPERMANNI,DENISB.MLtime-of-arrivalestimationbasedonlowcomplexityUWBenergydetection[C]//IEEEInternationalConferenceonUltra-Wideband,Waltham,USA,2006:958-604.
[8]GUVENCI,SAHINOGLUZ.Threshold-basedTOAestimationforimpulseradioUWBsystems[C].//IEEEInternationalConferenceonUltra-Wideban,Zurich,Switzerland,2005:420-425.
[9]GUVENCI,SAHINOGLUZ,MOLISHAF,et al.Non-coherentTOAestimationinUWBsystemswithdifferentsignalwaveforms[J].IEEEInternationalWorkshoponUltrawidebandNetworks,Boston,USA,2005:245-251.
[10]GUVENCI,SAHINOGLUZ.MultiscaleenergyproductsforTOAestimationinUWBsystem[C].//IEEEGlobalTelecommum.Conf,(GLOBECOM),2005.
[11]DDARDARID,WINMZ.Threshold-basedtime-of-arrivalestimatorsinUWBdensemultipathchannels[C].//IEEEInternationalConferenceonCommunications,Istanbul,Turkey,2006:4723-4728.
[12]蒙静.基于IR-UWB无线室内定位的机理研究[D].哈尔滨:哈尔滨工业大学,2010.
[13]YOUNGDP,KELLERCM,W.BLISSD, et al.Ultra-wideband(UWB)transmitterlocationusingtimedifferenceofarrival(TDOA)techniques[C].//37thAsilomarConferenceonSignals,SystemsandComputers,PacificGrove,CA,2003:1225-1229.
[14]EVENNOUF,MARXF,NACIVETS.AnexperimentalTDOAUWBlocationsystemforNLOSenvironment[C].//IEEE62thVehicularTechnologyConference-Fall,Dallas,Texas,USA,2005:420-423.
[15]DOHERTYL.Algorithmsforpositionanddatarecoveryinwirelesssensornetworks[D].UCBerkeley, 2000:1-54.
[16]FANGBT.Simplesolutionsforhyperbolicandrelatedpositionfixes[J].IEEETransactionsonAerospaceandElectronicSystems, 1990(26):748-753.
[17]YUK,OPPERMANNL.PerformanceofUWBpositionestimationbasedontimeof-arrivalmeasurements[C].//IEEEJointUWBSTandIWUWBS,Kyoto,Japan,2004:400-404.
[18]GEZICIS,SAHINOGLUZ.UWBgeolocationtechniquesforIEEE802.15.4apersonalareanetworks[C].//Cambridge,MA:MERLTechnicalReport,2004:1-12.
[19]YUK,GUOYJ.NLOSerrormitigationformobilelocationestimationinwirelessnetworks[C].//IEEE65thVehicularTechnologyConference-Spring,Dublin,Ireland, 2007:1071-1075.
[20]CELEBIH,GUVENCI,ARSLANH.OnthestatisticsofchannelmodelsforUWBranging[C].//IEEESarnoffSymposium,Princeton,USA, 2006:1-4.
[21]LEEJY,YOOS.LargeerrorperformanceofUWBranginginmultipathandmultiuserenvironments[J].IEEETransactionsonMicrowaveTheoryandTechniques, 2006,54(4):1887-1895.
[22]ALAVIB,ALSINDIN,PAHLAVANK.UWBchannelmeasurementsforaccurateindoorlocalization[C].//IEEEMilitaryCommunicationsConference,Monterey,USA, 2006:1-7.
[23]ALSINDIN,ALAVIK,PAHLAVANB.MeasurementandmodelingofultrawidebandTOA-basedranginginindoormultipathenvironments[J].IEEETransactionsonVehicularTechnology, 2009,58(3):1046-1058.
[24]BELLUSCIG,JANSSENG,YANJ, et al.ModelofdistanceandbandwidthdependencyofTOA-basedUWBrangingerror[C].//IEEEInternationalConferenceonUltra-Wideband,LeibnizUniversity,Hannover,Germany, 2008:193-196.
[25]DENISB,KEIGNARTJ,DANIELEN.ImpactofNLOSpropagationuponrangingprecisioninUWBsystems[C].//IEEEConferenceonUltraWidebandSystemsandTechnologies,Reston,USA, 2003:379-383.
杨狄(1989-),男,硕士生,主要研究方向为星基导航与定位技术。
唐小妹(1982-),女,副研究员,主要研究方向为星基导航与定位技术。
李柏渝(1982-),男,讲师,主要研究方向为星基导航与定位技术。
王飞雪(1971-),男,教授,主要研究方向为星基导航与定位技术。
A Review of Ultra Wideband Based Indoor Localization Technology
YANG Di,TANG Xiaomei,LI Baiyu,WANG Feixue
(SatelliteNavigationR&DCenter,SchoolofElectronicScienceandEngineering,
NationalUniversityofDefenseTechnology,Changsha410073,China)
Key words: Indoor localization technology; Ultra Wideband (UWB); time-of-arrival
