新型油电混合动力扫路车动力系统设计与仿真
2016-01-04张炳力,张秀琳,吴德新
新型油电混合动力扫路车动力系统设计与仿真
张炳力,张秀琳,吴德新
(合肥工业大学 机械与汽车工程学院,安徽 合肥230009)
摘要:文章主要针对传统双发动机扫路车能耗高、污染大的问题,结合混合动力系统特性和扫路车工作特点,为开发新型油电混合动力扫路车进行动力系统结构配置和主要参数匹配;并基于AVL-Cruise/Simulink联合仿真平台,对设计的动力系统进行了仿真验证。结果表明,整车动力系统的设计和参数的匹配比较合理,能够满足扫路车工作要求,并能有效降低能耗。与传统扫路车相比,混合动力扫路车具有更大优势。
关键词:油电混合动力;AVL-Cruise/Simulink软件;扫路车;动力系统
收稿日期:2013-12-17;修回日期:2014-02-17
基金项目:安徽省科技攻关计划资助项目(12010202039);广东省教育部产学研结合资助项目(2012B091100310)
作者简介:张炳力(1968-),男,安徽肥西人,博士,合肥工业大学教授,硕士生导师.
doi:10.3969/j.issn.1003-5060.2015.01.004
中图分类号:U469.691文献标识码:A
Researchonpowertraindesignandsimulation
fornewtypehybridsweepertruck
ZHANGBing-li,ZHANGXiu-lin,WUDe-xin
(SchoolofMachineryandAutomobileEngineering,HefeiUniversityofTechnology,Hefei230009,China)
Abstract:In view of the high energy consumption and the pollution of the traditional double power sweeper truck, and based on the features of hybrid system and the working characteristics of sweeper truck, the structural analysis and key parameters matching for a new type hybrid sweeper truck are conducted. Based on AVL-Cruise/Simulink co-simulation platform, the simulation verification on the powertrain designed is conducted. The results demonstrate that the vehicle power system design and parameter matching are reasonable, meet the working requirements of the sweeper and effectively reduce the energy consumption. Compared with the traditional sweeper truck, the hybrid sweeper truck has its advantage.
Keywords:oil-electrichybridpower;AVL-Cruise/Simulinksoftware;sweepertruck;powersystem
0引言
扫路车作为环卫设备之一,是一种集路面清扫、垃圾回收和运输为一体的新型高效清扫设备[1]。对于将汽车底盘改装的扫路车,绝大多数采用双燃油发动机,即为驱动行驶配备一台主发动机,为驱动工作装置另外专门配备了一台副发动机。这种配置不但油耗较大,噪声较高,使用性能也存在不足[2]。
随着混合动力技术的发展,美国、德国等国相继在工程及农业机械行业中使用混合动力系统[3],但迄今关于油电混合动力扫路车的研究并不多。
双发动机扫路车虽然在行走系统和作业系统动力上相互独立,无耦合、制约关系,保证了其良好的清扫效果,但由于2个发动机工作,车辆的油耗高、噪声大、污染严重,且清扫模式下大功率的主发动机持续低速运转,燃油经济性和排放性能不理想。为了克服上述问题,并针对混合动力扫路车多动力需求、多运行模式、有限的布置空间、受限的改造成本等特点,参照传统并联式混合动力系统结构,本文提出一种针对扫路车的新型混合动力系统,同时在精确的理论建模基础上进行了仿真验证试验,结果达到理想的效果。
1动力系统及工作模式
新型混合动力扫路车动力系统结构如图1所示,该动力系统取消了原型车中的副发动机。发动机、电机以并联方式与动力耦合器连接,通过动力耦合器完成扫路车行驶系统和工作系统的动力切换。
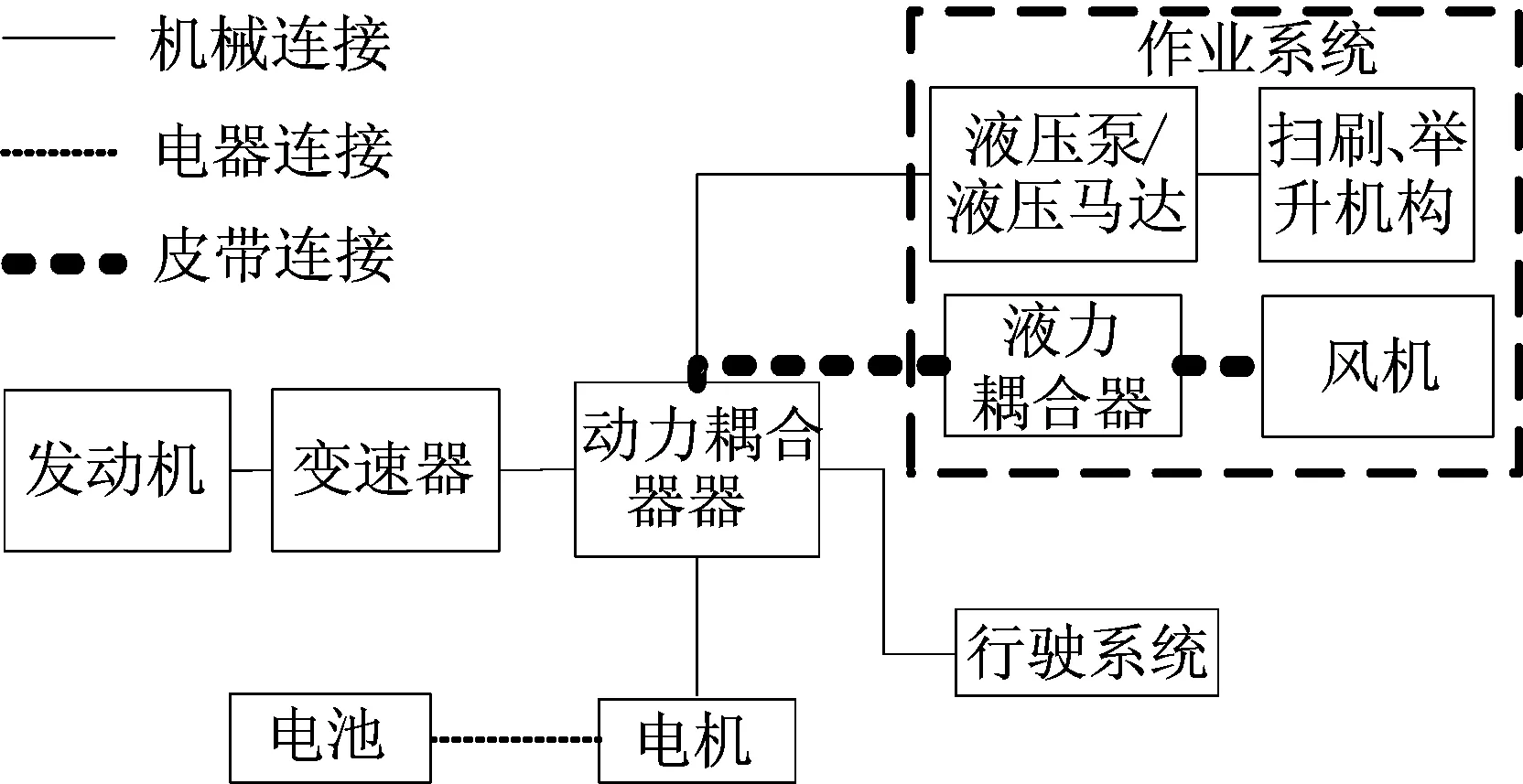
图1 新型扫路车混合动力系统结构
新型扫路车混合动力系统的工作模式为:当扫路车处于转场运输模式时,电动机不工作,行驶动力由变速器提供;当扫路车处于清扫工作模式时,风机的驱动力由主发动机通过变速箱提供,行驶动力由电动机提供。该系统充分利用了燃油驱动系统和电驱动系统的优点,通过对动力耦合器的传动比进行优化设计,可以充分发挥发动机与电机的各自优势,使其均处在最优工作区间。同时该方案对原车的底盘动力传递系统改动较小,有效地降低了整车的改装成本,并且保证了原车的操纵稳定性。
2主要系统部件结构及参数设计
2.1 原型车参数及动力性能设计指标
以某双发动机扫路车作为原型车,其基本参数如下:整备质量为8 810kg,满载质量为14 000kg,主减速比为5.57,风机功率为30kW,工作功率为50kW,空气阻力系数为0.7,迎风面积为5.86m2,滚动半径为0.436 m,滚动阻力系数为0.016,机械效率为95%。
2.2 动力耦合器的设计
动力耦合器结构如图2所示。输入部分为变速器输出动力和电机输出动力,输出部分为行驶系统驱动力和作业系统驱动力。
为了简化动力耦合器结构、方便驾驶员操作,将同步器1、2的拨叉轴做成一体,实现同步器1、2动作一体化。齿轮4采用双联齿轮(斜齿轮-锥齿轮),实现动力传动方向的改变。同步器均采用锁环式惯性同步器。动力耦合器工作过程为:处于转场运输模式时,同步器1、2右移,电机不工作,行驶系统动力由发动机经过变速器输出轴提供;处于清扫模式时,同步器1、2左移,工作系统的动力由发动机经过变速器输出轴提供,行驶系统动力由电动机提供。

图2 动力耦合器结构
2.3 电机参数的选择
混合动力扫路车电机只要满足工作时起步、爬坡以及驱动车辆恒速行驶即可。
首先,根据最高车速确定电机峰值功率,计算公式如下:
(1)
其中,Pemax1为最高车速时电机的峰值功率;uamax为最高车速;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;ηT为传动效率。
最高车速下,电机最高转速与峰值转矩的计算公式如下:
(2)
(3)
其中,nmax1为最高车速时电机最高转速;Tmax1为最高车速时电机峰值转矩;ig为动力耦合器中电机-驱动桥传动比;i0为主减速器速比;rr为车轮滚动半径。
将相应数值代入 (1)~(3) 式计算可得:
P
emax1
=14.03
kW
, n
max1
=3 904
r
/
min
,
T
max1
=34.32
N
·
m
。
根据最大爬坡度确定电机的峰值功率[4],其计算公式如下:
(4)
(5)
(6)
其中,Pemax2为最大爬坡度时电机峰值功率;θmax为最大爬坡角度;nmax2为最高车速时电机最高转速;Tmax2为最高车速时电机最高转矩。
将相应数值代入 (4)~(6) 式计算得:
P
emax2
=24.5
kW
, n
max2
=976
r
/
min
,
T
max2
=239.72
N
·
m
。
由以上计算可得[4],电机的峰值功率Pemax≥Pemax2,电机的过载系数取2,则电机额定功率Pe为12kW。电机的最高转速对应最大车速时的电机转速,故nmax≥nmax1。取电机扩大恒功率区系数β值为2.6,则电机的额定转速ne为1 500r/min。电机的峰值转矩Temax≥Temax2,电机的额定转矩Te=9 550 Pe/n=77N·m。综上分析,驱动电机参数如下:最高转速为9 000r/min,峰值功率为90kW,额定功率为30kW,基速为3 600r/min,峰值转矩为240N·m,额定转矩为 80N·m。
2.4 蓄电池参数的选择
扫路车清扫工作的平均速度为15km/h,工作
时间为5h,则匀速行驶的需求功率计算公式为:
(7)
将整车参数代入(7)式,计算可得Pavg=6.84kW。电池的需求能量计算公式为:
(8)
其中,ηe为电机工作效率,取0.93;ηb为电池放电效率,取0.88;t为蓄电池额定工作时间;DOD为电池的放电深度,取70%。
将相关数值代入(8)式得E=59.69kW·h,因此,取E=60kW·h。
由上述理论计算情况选择磷酸亚铁锂系电池的具体参数如下:电池容量为10A·h,电池串联数为105,电池并联数为18,单体电压为3.2V,总电压为336V,电池能量为60kW·h。
3仿真验证与结果分析
采用Cruise/Simulink联合仿真平台,对提出的系统部件结构及参数设计进行验证和分析[5-8]。仿真平台如图3所示。
整车、驾驶员、防滑控制、蓄电池、驱动电机、主减速器、差速器、车轮及发动机等模型由Cruise的标准模块提供;动力耦合器由Cruise中Macros宏模块自定义建立;电机控制、发动机转速控制和动力耦合器工作模式控制等模型在Simulink中建立,并采用Matlab@API接口。
3.1 转场运输模式仿真
扫路车处于转场运输模式时,工作系统不工作,发动机驱动行驶,此时车辆相当于传统燃油车。转场运输模式下扫路车从车库到工作区,此路段多为城市路段,从工作区到垃圾投放点,多为城市路段和城郊路段的结合,从垃圾投放点到车库同样为城市和城郊路段的结合。本文所研究的混合动力扫路车最高车速为90km/h,为尽可能覆盖城市和市郊可能出现的行驶工况,选用NEDC-man-90工况进行仿真模拟。仿真结果如图4所示。
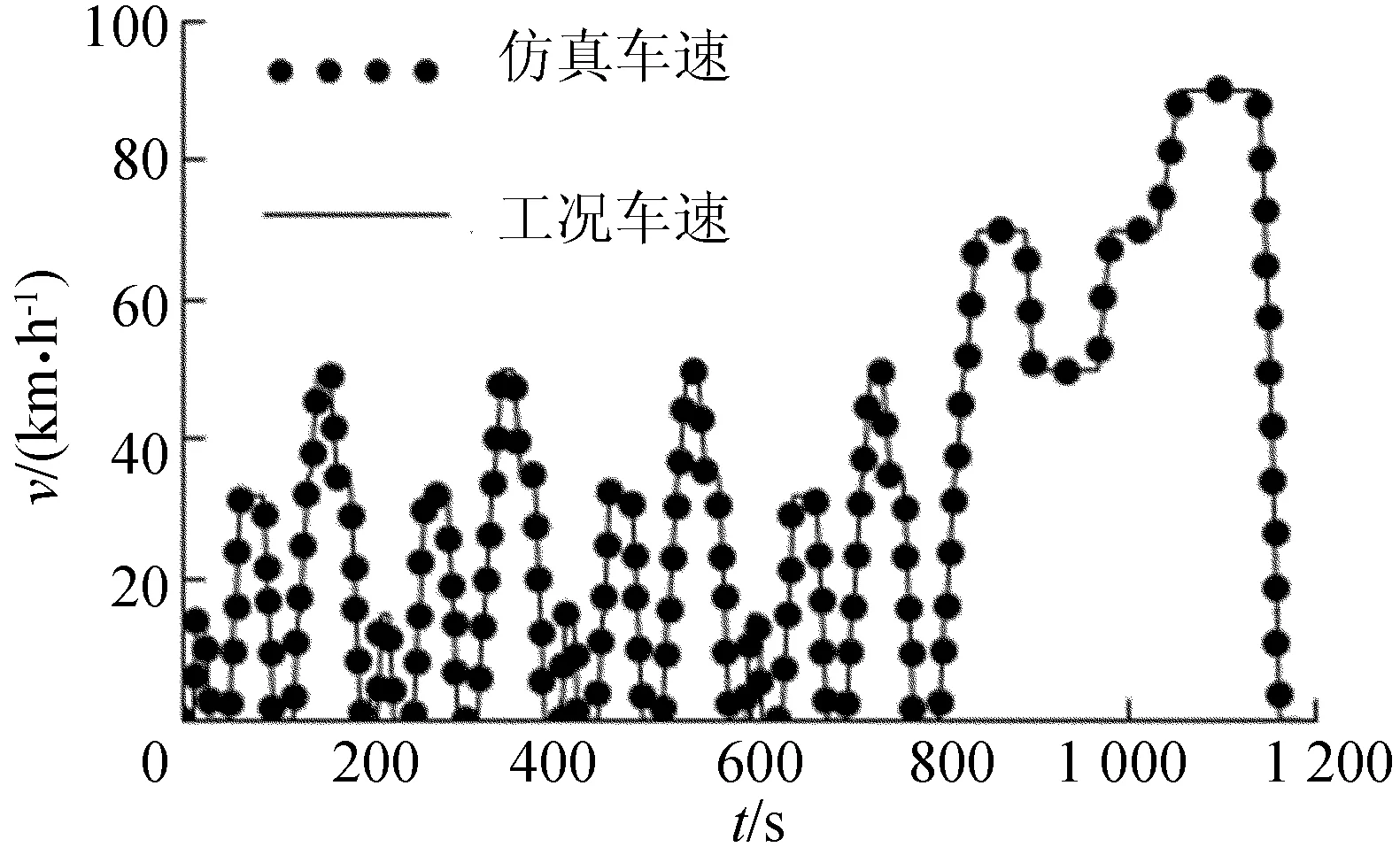
图4 NEDC -man -90工况仿真
转场运输模式下,实际车速对期望车速的跟随情况可从图4看出,仿真模型能够大致实现期望车速的跟随,仅存在略微的偏差。
3.2 清扫模式的仿真
扫路车处于清扫模式时,行驶系统与工作系统同时工作。扫路车清扫模式下行驶速度较慢,平均车速一般为10~20km/h,且多凌晨行驶,路面车流量少,行车较顺畅,无频繁加、减速与停车现象。针对该特殊路况,清扫工作模式典型工况总运行时间为1 200s,中途设置1次停车等红灯情况。在Cruise软件中自定义工况,仿真结果如图5所示。
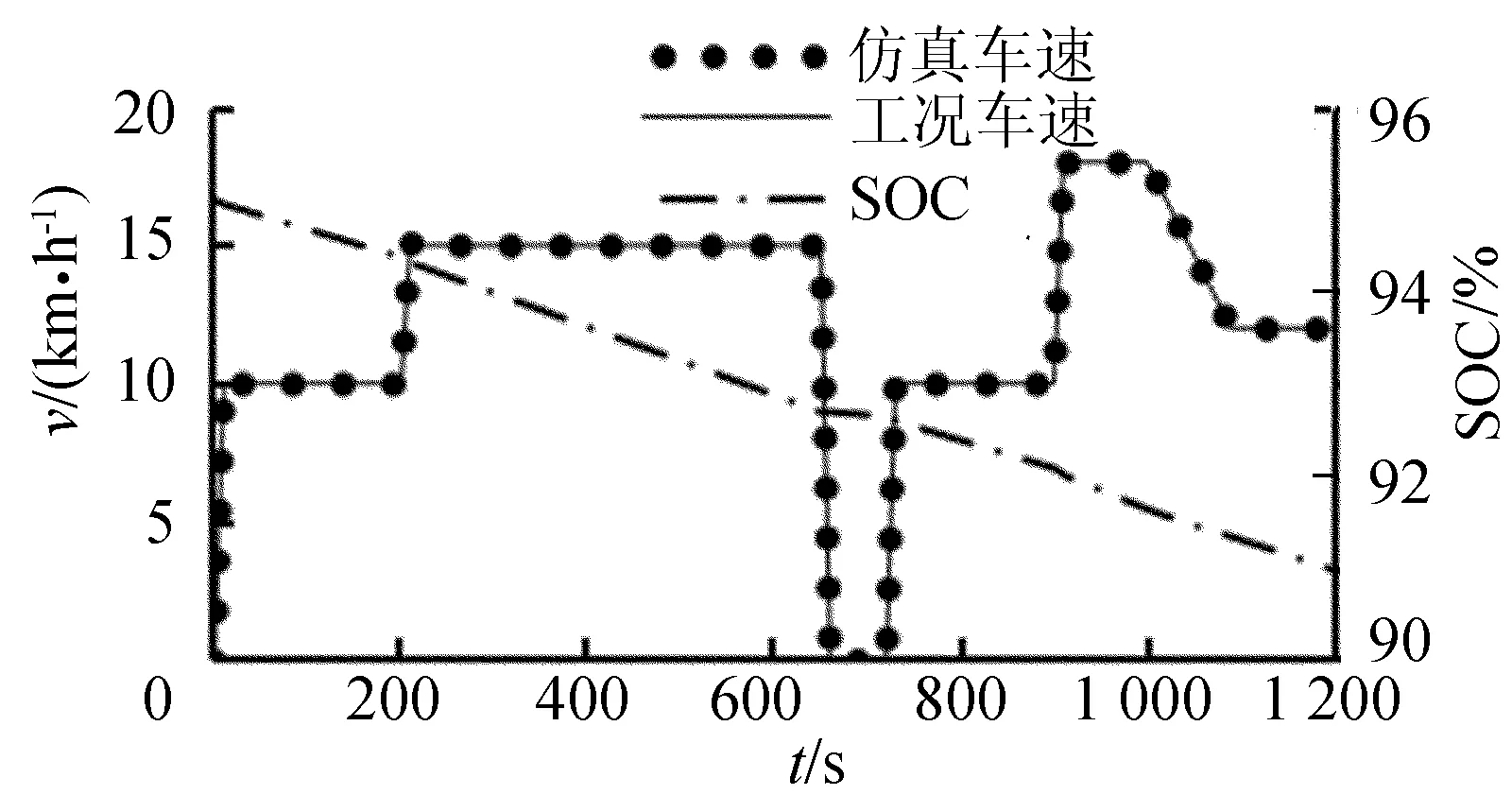
图5 清扫模式下的仿真结果
由图5可看出,清扫模式下实际车速对期望车速的目标跟随情况较好,整车运行稳定。
本文在新工科背景下,对数据库技术与应用课程与学科专业交叉融合的教学模式进行研究与实践,按照新工科人才培养目标,提出了“二线三段”的教学思路,改革教学模式,建立专题项目资料库,重订教学大纲,重组了教学内容,实施“案例导向、项目驱动”教学方法和多元化考核机制。实践表明,在此教学模式下,学生能积极主动地将数据库技术与学科专业相融合,利用数据库技术解决本专业实际问题,为学生不断获取新知、接受终身教育奠定了基础。
由图5可知,在典型工况的 1 200s时间内,电池SOC值由95%降到91%,即运行 1 200s(相当于设计运行时间5h的6.7%)时,电池SOC下降了4%左右,说明电池总能量可以满足扫路车的工作时长要求。
清扫模式下发动机的油耗情况如图6所示。扫路车工作 1 200s,即发动机驱动作业系统工作1 200s,发动机油耗为2.4kg,则清扫模式下混合动力扫路车的油耗Vfuel2为:
已知原型双发动机扫路车清扫模式下的主、副发动机总油耗为 12L/h。综合转场运输模式和清扫模式的发动机油耗,按照扫路车每天清扫 5h,转场运输 50km计算,混合动力扫路车每天的油耗Vfuel=5×8.57+12=54.85L。

图6 工作模式下发动机油耗情况
混合动力扫路车性能指标与仿真结果对比见表1所列。由表1可见,混合动力扫路车能够满足设计要求,并明显提高了车辆燃油经济性。
基于我国目前燃煤发电所占比重较大的因素,电驱动系统完全替代燃油驱动系统并不能完全实现节能减排的目的。但是综合考虑,扫路车的工作时段多为凌晨,其充电时间一般在夜间,对电网系统而言,可以起到非常好的“削峰填谷”作用,有利于维持电网系统的稳定,避免电力浪费。其次,火力发电和内燃机一样,都要消耗化石燃料,这个过程会产生多种污染物质。但是,电厂通常建设在远离人口密集的地区,与燃油车相比,污染源要更加远离人群,更方便对污染进行统一处理和控制[9]。
4结束语
本文针对研发中的动力系统参数匹配问题,以整车动力性能指标和工作时长要求为约束条件,给出了一套动力系统主要参数的设计方法。
基于AVL-Cruise和Simulink搭建了混合动力扫路车联合仿真平台,从仿真结果来看,仿真车速能较好地跟踪工况车速,动力系统参数设计能够满足转场运输和清扫工作的要求,电池续驶里程符合工作标准,本文设计的新型油电混合动力扫路车方案是可行的。
[参考文献]
[1]曹何滨.一种简易实用的电动清扫车[J].商用汽车,2011,18(11):52-53.
[2]罗立炎,陈敬洁,李源,等.道路清扫车传动形式探析[J].建设机械技术与管理,2010,11(8):105-107.
[3]RahmanZ,ButlerKL,EhsaniM.Acomparisonstudybetweentwoparallelhybridcontrolconcepts[C]//SAETechnicalPaper2001-01-0994,2000.doi:10.4271/2000-01-094.
[4]EhsaniM,GaoYimin,GaySE,etal.现代电动汽车、混合动力电动汽车和燃料电池车[M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2008:48-50.
[5]谢星,周苏,王廷宏,等.基于Cruise/Simulink的车用燃料电池/蓄电池混合动力的能量管理策略仿真[J].汽车工程,2010,32(5):373-378.
[6]尹安东,杨峰,江昊.基于iSIGHT的纯电动汽车动力系统匹配优化[J].合肥工业大学学报:自然科学版,2013,36(1):1-4,92.
[7]尹安东,李领领.基于CRUISE的轻度ISG型HEV控制策略研究[J].合肥工业大学学报:自然科学版,2012,35(1):5-8.
[8]周苏,牛继高,陈凤祥,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(11):924-929.
[9]孔维政,李琼慧,汪晓露.基于全周期能源利用效率的电动汽车节能减排分析[J].中国电力,2012,45(9):64-67.
(责任编辑闫杏丽)
