自升式海洋平台升降控制系统的设计❋
2015-12-31马建林任丽娜齐继阳
马建林,任丽娜,齐继阳,孟 洋
(江苏科技大学 机械工程学院,江苏 镇江 212003)
0 引言
自升式平台用于海洋石油开发的各种海上平台中,比较适合于近海石油开发,因其造价低、用钢量少以及利用率高等优点,在近海石油开发中发挥了巨大的作用。其中升降装置控制系统是自升式平台的关键部分,也是平台设计制造的难点,其性能的优劣将直接影响海洋平台的使用效果和安全性能[1]。
1 控制系统硬件设计
本项目研究的自升式海洋平台实物是在理论设计基础上缩小100倍的模型,主要由平台主体、桩腿(带桩靴)和升降系统等部分构成。该海洋平台为三角形状类型,有三条桩腿,采用齿轮齿条式升降系统,每条桩腿由3根主弦杆构成,每根主弦杆上铺设一根齿条。在桩腿的其中一根齿条上设一个小齿轮与其啮合,啮合小齿轮安装在步进电机上,步进电机通过驱动小齿轮使平台和桩腿之间做相对的上升和下降运动。平台的锁紧装置采用气压锁紧,锁紧结构采用桩腿上的一段齿条与锁紧齿条啮合来锁紧,在每条桩腿上对称放置一对锁紧齿条,当平台停止运动时,通过气泵产生气体来推动换向阀使气压缸运动,然后推动锁紧齿条使其与桩腿齿条啮合,达到对整个桩腿锁紧的目的。自升式海洋平台的整体结构如图1所示。
自升式海洋平台的运动过程主要是指桩腿下降、平台上升、平台下降和桩腿上升。平台的工作原理为:当海洋平台被拖航到达预定位置后,气动锁紧装置驱动锁紧机构先打开,然后平台通过升降系统将桩腿伸入海底,当桩腿到达海底后,再以低速对桩腿进行预压,使平台能稳定地停在工作位置,此时步进电机继续驱动齿轮旋转,而桩腿已经插入海底不能再继续向下运动了,此时齿轮的继续旋转必然带动平台主体的上升,当平台到达距离海平面设定高度时,电机便停止转动,气动锁紧装置驱动锁紧机构锁紧,平台便平稳地固定在了该工作位置,这是平台的上升过程;当平台需要移位时,锁紧装置要先打开,然后平台下降至海平面,再慢慢拔出桩腿,并将桩腿完全升起,这是平台的下降过程,此时就可以将平台拖航至下一个工作位置了[2]。

图1 自升式海洋平台整体结构简图
1.1 控制系统结构设计
本系统采用Siemens S7-200和步科触摸屏组成的系统控制现场的电磁阀、电动机和限位开关等执行机构,以步科触摸屏和装有组态软件WinCC的PC机作为上位机对下位机PLC进行监控。系统分为单元层、设备层和管理层3层,其中设备层连接着现场的各种设备,如行程开关、报警器和传感器等,其主要任务是对现场设备的控制以及对信号的采集;单元层的主要任务是采集设备层各模块间的信息来控制各底层模块,同时为管理层提供其所需的数据信息;管理层的主要任务是远程监控,使操作人员能实时地了解现场设备的工作数据。
1.2 上位机和下位机的设计
上位机采用步科MT4414触摸屏,它采用65536色TFT液晶显示器,支持Windows系统的所有字体,拥有矢量图像显示功能、图形库和动画功能,采用32位RISC CPU,能迅速调用复杂图形,满足了大多数用户的使用需求。
下位机采用西门子S7-200中最高级的模块CPU226系列的PLC,该PLC集成了24输入/16输出共40个数字量I/O点,具有6个30kHz的高速计数器,2路20kHz的高速脉冲输出以及PID控制器;2个RS485通讯/编程口,有3种通讯协议,即PPI通讯协议、MPI通讯协议和自由口方式通讯,I/O端子排可很容易地整体拆卸,可用于较高要求的控制系统,具有非常多的输入/输出点和非常强劲的模块扩展能力;此外,其内部还集成了许多特殊功能,如运行速度越来越快,功能越来越强等,可完全胜任一些复杂的中小型控制系统的工作需求。
在海洋平台上安装有双轴倾角传感器,用来测试平台的倾斜角度,根据平台的倾斜角度,相应地调整各桩腿上升或下降的速度,促使平台平稳升降。此外,还配有激光位移传感器来获取平台的行程大小,通过行程限位开关来限定桩腿升降的极限位置,以及电磁阀来实现锁紧装置对桩腿的锁紧或松开。
2 网络通讯
控制系统的通讯包括PLC与上位机监控软件WinCC之间的通讯、PLC与触摸屏之间的通讯。PLC与WinCC之间的通讯采用OPC技术,与触摸屏之间的通讯采用PPI协议。
由于WinCC软件没有S7-200PLC的通讯驱动程序,因此WinCC与S7-200PLC之间采用间接通讯的方式。OPC通讯协议是一个虚拟接口,需要第三方软件的支持,可用于 WinCC与S7-200系列PLC的通讯,PC Access内置OPC测试Client端,是S7-200系列PLC专用OPC服务器。
WinCC中连接的变量是从PC Access建立的项目中导入的,因此要先在PC Access中建立项目且要与现场PLC程序中的内存地址相对应。为便于在PC Access中建立项目可以先在PLC编程软件中建立变量符号表,通过PC Access导入符号命令,然后将变量符号表导入到PC Access中就完成了在PC Access中项目的建立。在WinCC变量管理器中选择添加OPC通讯驱动程序来启动OPC通讯驱动程序并且建立连接,通过OPC的条目管理器的S7-200OPC Server将PC Access中的项目导入WinCC中从而完成上位机WinCC与PLC之间的通讯连接[3]。
触摸屏与S7-200PLC之间采用PPI通讯协议,在触摸屏的COM0口与PLC之间用RS232总线连接,为保证触摸屏与PLC之间的正常通讯,在HMI属性对话框中进行如下设置:通讯方式为RS232,波特率为9 600baud,数据位为8,校验位为无校验,其他均为默认设置。
3 PLC程序设计
本系统采用SIEMENS S7-200PLC配套的编程工具STEP7-Micro/WIN32进行系统参数设置、PLC程序的编制、测试、调试和文档的处理。
该控制系统主要有手动控制和自动控制两种控制功能。手动控制时,可以实现对3条桩腿的单独控制,每条桩腿有6种操作方式,即桩腿下降、预压载、平台上升、平台下降、拔起桩腿、桩腿上升;自动控制时,可以实现对3条桩腿的协同控制,且在平台上升或下降的自动过程中,采用双轴倾角传感器测量平台的倾斜角度,并将测量值反馈到PLC进行分析和处理以实现平台准确快速的调平。首先PLC要先根据测量值与预先设定好的水平精度值作比较,若平台倾斜角度未超过限定值,则平台仍以预定速度正常运动;否则,则PLC通过调用逻辑指令对各桩腿的运动速度进行相应的调节,以实现平台稳定快速的自动平衡。
4 控制系统的软件设计
目前的控制系统都要求具有控制和监视的功能,即既可以使操作人员直观地了解现场的工作情况,实时显示现场设备的工作数据,如控制系统的各种参数和平台状态,并且能够提供报警信息等功能,同时又可以向系统发出控制指令。本监控系统的功能框图如图2所示。
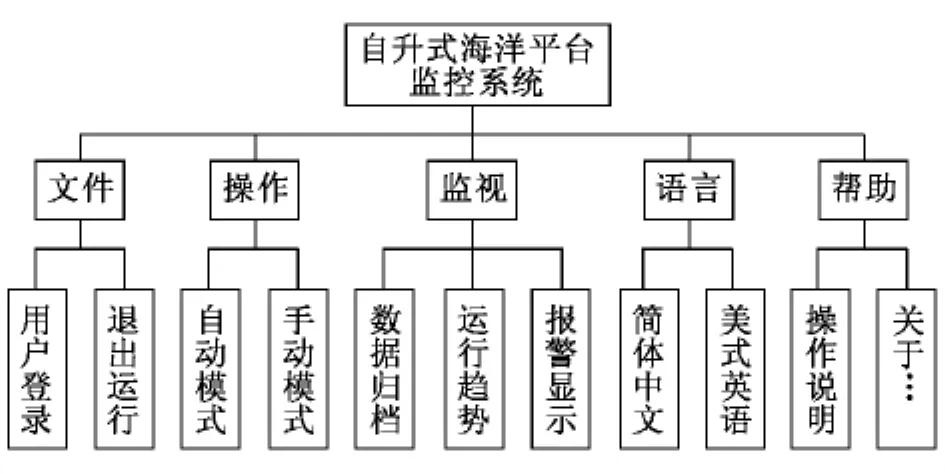
图2 监控系统功能框图
4.1 触摸屏界面设计
触摸屏界面是在组态软件KincoHMIware中组态完成的,该软件是步科自动化有限公司为MT4000/5000系列HMI(人机界面)开发的专用人机界面组态编辑软件,为用户提供了一个功能齐全的集成软件开发环境,支持离线模拟功能,方便用户直观地预览组态效果,提高编程效率,其在线模拟操作可以使设计的工程直接在计算机上模拟出来,从而避免了下载到触摸屏再进行相应操作的麻烦。
触摸屏与PLC相结合可取代电控柜上众多的控制按钮、选择开关和信号指示灯等,所有的操作都可以通过显示屏上的操作元件进行。触摸屏的软件设计包括创建画面和设定变量,并将它们与PLC建立连接。创建画面包括输入输出域组态、功能键组态以及数值显示等格式;设定变量是把触摸屏的组态功能与PLC的相应I/O点及存储单元间建立联系,实现触摸屏对PLC的控制。
触摸屏的控制画面由登录画面、主页画面、自动模式画面、手动模式画面和操作说明画面组成,并且每个画面都设有向上、向下、返回箭头和切换按钮,单击切换按钮可以方便用户切换到相应的画面;系统启动后首先进入登录画面,该画面包含登录用户名、登录密码、用户等级以及时间显示等信息,用户登录成功后画面切换到主页画面。主页画面包括进入各窗口的按钮,用户通过点击按钮可直接进入相应的窗口。
4.2 WinCC界面组态
WinCC是西门子公司推出的适用于所有工业和技术领域的工业自动化监控系统组态软件,具有全面的开放性,可提供OLE、ActiveX、OPC服务器和客户机等接口或控件,支持所有主要PLC系统的通讯通道,还包括PROFIBUS-DP、DDE、OPC和工业以太网等非特定控制器的通讯通道[4]。
利用WinCC中图形编辑器的图形编辑功能,可以方便的组态和编辑监控画面[5]。利用该组态软件可以完成上位机显示所需的现场设备监控画面,操作员通过监控画面可以实现实时数据的动态显示、数据存储、报警记录、操作日志、历史报表与实时报表输出打印等功能。此外,当设备出现故障时,声光报警器自动启动发出报警信号,通知值班人员确认并排除故障。通过组态的报警记录、记录发生的时间以及故障类型,方便维修人员进行事故的查询以及设备的维修。
5 结束语
以自升式海洋平台为控制对象,介绍了升降系统的工作原理、硬件设计、软件设计等方面的内容。试运行表明该系统实时性好,可靠性高且操作方便,达到了设计要求,满足了对海洋平台升降系统的控制要求。
[1]黄维学,刘放.自升式海上钻井平台升降系统技术特点分析[J].一重技术,2011(2):1-3.
[2]马爱军,周金鑫,唐文献,等.深水自升式钻井平台升降控制系统设计[J].机械设计与制造工程,2013(8):60-63.
[3]李申伟,徐淑华,张卫,等.基于 WinCC及S7-200PLC的自动升旗控制系统[J].青岛大学学报(工程技术版),2010,25(6):10-15.
[4]甄力东.西门子 WinCC基础与应用[M].北京:机械工业出版社,2011.
[5]王玲玲,邱一龙,沈鹏,等.自升式海上风电安装船升降控制系统的设计[J].机械设计与制造,2012(9):54-56.