基于WinCC和MATLAB的水位模糊控制系统设计
2015-12-31朱建军
朱建军
(吉林化工学院,吉林 吉林 132022)
0 引言
液位控制对象具有非线性、纯滞后、大惯性等特点,常规控制方法往往难以满足控制要求,用经典PID控制器来实现控制时,其效果不理想,系统响应的调节时间较长。与传统控制方法相比,模糊控制无需建立数学模型,被控对象的特性和参数变化对控制质量的影响较小,对于非线性和滞后对象采用模糊控制的效果比PID效果好,因此很适合液位过程控制。本文以水箱系统作为对象,采用MATLAB进行后台控制策略运算和数据处理,通过在WinCC中的参数连接与设置,实现组态的模拟仿真,这样既能减少对硬件的依托,又能较好地监控对象的实时运行状态,在实际教学实验中有着很好的应用前景。
1 液位控制系统的组成
水箱液位控制系统的被控对象一般包括上水箱液位、中水箱液位和下水箱液位,控制的目的是使水箱液位在某一给定值上下较小范围内变化。本文选用的控制对象为下水箱液位,其控制系统结构如图1所示。
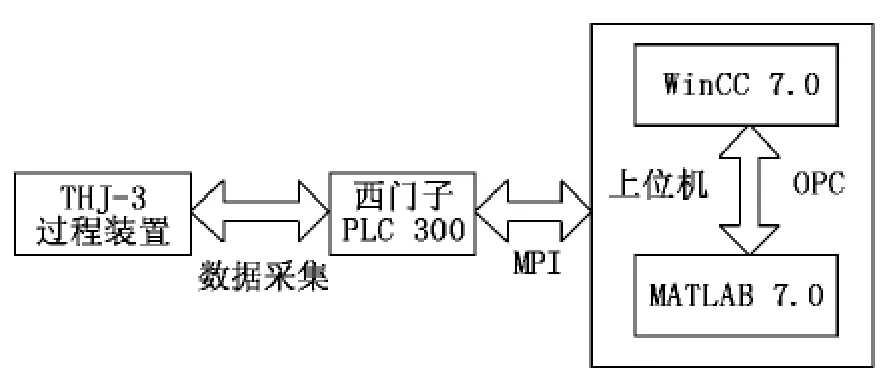
图1 液位控制系统结构
2 模糊控制器的设计
2.1 模糊控制器的结构
根据液位过程控制的特点和控制要求,模糊控制器选用二维结构,如图2所示。模糊控制器包括输入量模糊化、模糊推理和解模糊3个部分。图2中,E和EC分别为液位偏差e和偏差变化率ec模糊化后的模糊变量;u*为解模糊化后的输出增量;Ke、Kec分别为e和ec的模糊量化因子;Ku为输出变量u的比例因子。

图2 液位控制系统的模糊控制模块图
2.2 模糊论域
根据实验情况,确定输入和输出的论域,要求液位的偏差E的范围为[-15,+15],偏差变化率Ec的范围为[-0.1,+0.1]。模糊控制器的输出用来控制阀门的开度,它的范围为0%~100%。
2.3 变量设置
液位和流速变量的设置包括值的范围、模糊子集和隶属度函数的数量和分布。为了简化模糊控制器的计算,输入变量e和ec以及输出变量u的隶属度函数都选用5种等三角形的隶属度函数,分别为NB、NS、ZE、PS和PB。
2.4 模糊控制规则表
模糊控制器的主要组成部分是一套语言学的模糊控制规则和用来解释这些模糊规则的推理机。
模糊控制规则提供了语言控制知识的专家和自动控制策略之间的转化激活器。每一条控制规则都由一个前件和一个后件组成,通用的规则形式可以表示为:
Ri:IFXis A1andYis A2,THENUis C1
其中:Ri是指第i条规则;X和Y是系统输入变量;U是输出变量;A1、A2和C1是系统相应的输入输出论域的子集。
根据此原理可设计出模糊控制器的25条模糊控制规则,如表1所示。
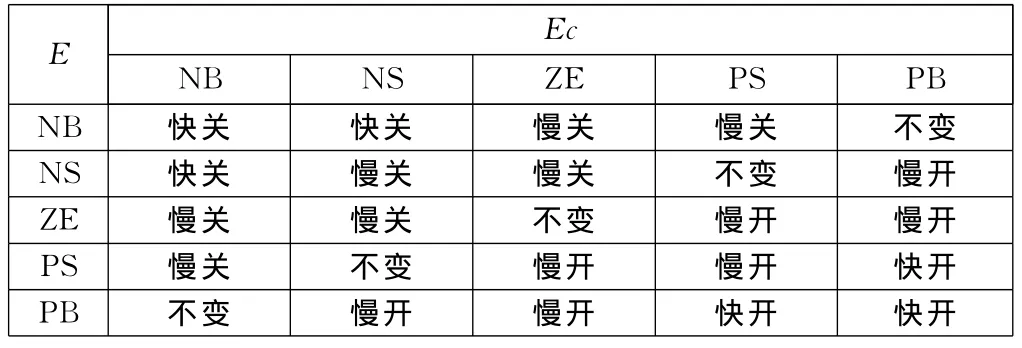
表1 模糊控制规则表
3 液位控制系统软件设计
3.1 监控画面组态
本文采用西门子公司的 WinCC 7.0工业组态软件设计完成了监控平台的基本功能,比如实时曲线、历史曲线、历史数据、动画实现、报警模块、报表模块和打印模块。
3.2 系统模型建立
在Simulink里编写了常规PID和模糊控制两种控制算法,如图3所示。通过OPC技术实现 WinCC与Simulink之间的实时通讯,直接调用“OPC Read/Write”功能,用在Simulink中搭建的控制算法实现对水箱液位的实时控制,并在 WinCC上显示不同控制算法的趋势,可以清晰、直观地比较出不同控制策略的优缺点。
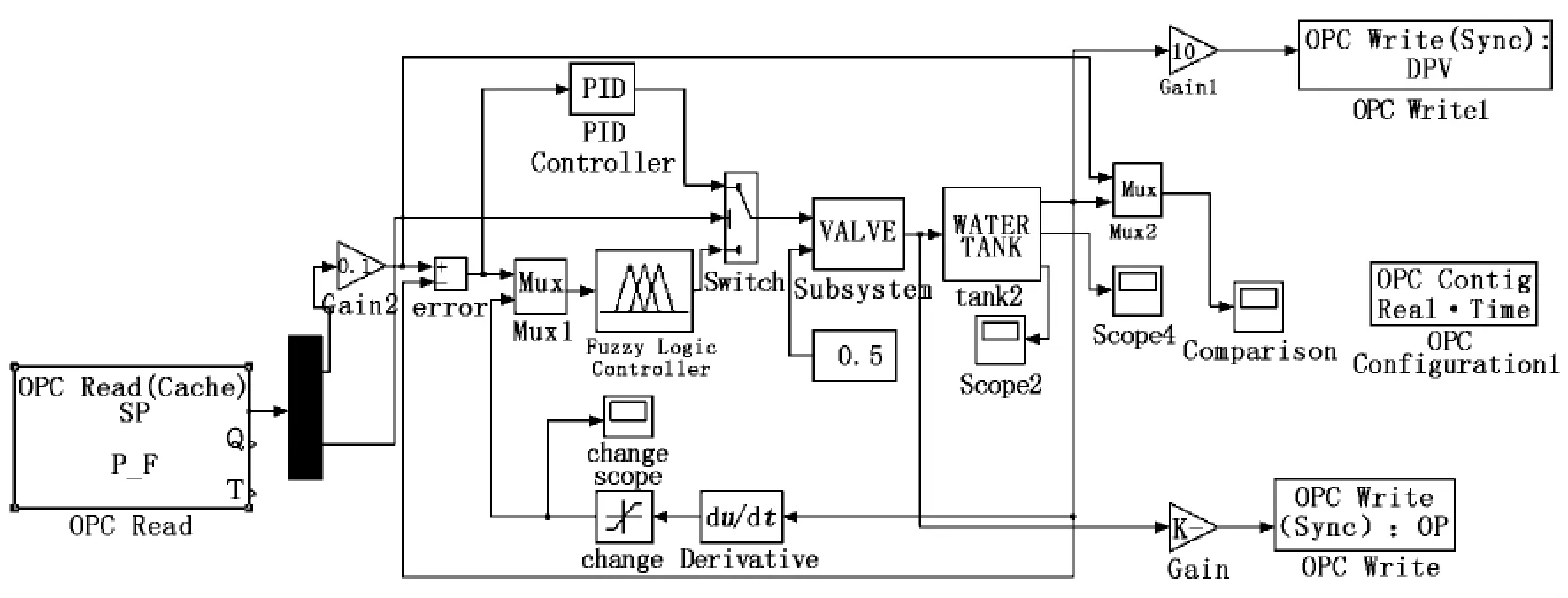
图3 液位系统MATLAB的OPC接口图
4 实验数据分析
至此,一个基于Simulink环境下 MATLAB和WinCC相结合的模糊实时控制系统设计完毕。将MATLAB和WinCC投入运行,在WinCC监控画面中可以看到实际液位跟踪设定液位的实时监控图。
对闭环PID控制和模糊控制两组实验的结果在同一坐标下进行比较,如图4所示。

图4 水箱液位系统组态运行趋势图
由图4可知,在相同的条件下,PID反应速度较慢,但动态品质较好且能消除静态偏差。模糊控制没有超调,且上升速度和稳定速度都是较快的,但存在静态偏差。总之,采用模糊控制方法对单容水箱液位的控制效果要比常规闭环PID控制的响应速度快,且较快地达到稳态,从而改善系统的性能。
[1]冯江涛.基于OPC的组态软件和 MATLAB的通信实现[J].微计算机信息,2008,24(1):295-297.
[2]饶克克.基于OPC的多客户端与WinCC的数据通信[J].化工自动化及仪表,2012,25(1):133-135.
[3]王志开.PLC及 WinCC监控软件在自动控制中的应用[J].中国科技信息,2005,35(3):13-17.
[4]谭元飞.基于OPC的以MATLAB为计算平台的工业监控系统设计[J].自动化与仪器仪表,2011,15(4):54-59.
[5]吴明永,王国伟.基于OPC和MATLAB的锅炉汽包水位智能控制系统[J].计算机测量与控制,2010,18(10):2296-2298.
[6]杨杰,齐向东.单容水箱液位模糊控制系统的设计与研究[J].机械工程与自动化,2013(6):135-137.
