线控换档开关中的凸轮机构研究
2015-12-31张志强陈辛波
张志强,陈辛波,岳 彪
(同济大学 汽车学院,上海 200237)
0 引言
汽车线控技术就是将驾驶员的操纵动作经过传感器变成电信号,通过电缆直接传输到执行机构的一种系统[1]。目前的线控技术包括线控换档系统(Shift-By-Wire)和线控制动系统(Brake-By-Wire)、线控转向系统(Steering-By-Wire)等等[2]。
本文研究的是线控换档开关,凸轮机构是其核心组成部分,对开关功能设计的实现起着关键性作用。
1 线控换档开关凸轮机构设计与分析
1.1 线控换档开关凸轮机构选型
研究换档开关内部的凸轮机构,重点是要研究在操作开关过程中,凸轮机构对开关使用者力和行程的反馈[3-4]。图1为开关内部凸轮机构示意图。

图1 线控换档开关内部的凸轮机构
1.2 旋转角度与旋转力矩的数学模型
凸轮曲面对弹簧顶销的作用力FN可分解为压缩弹簧产生的弹簧力FF和旋转方向的切向力Fφ,如图2所示。图2中,α为力分解角度。
弹力FF与位移x的关系为:

其中:c为弹簧的弹性系数;x为弹簧的压缩变形量。x又代表了凸轮曲面的轮廓与旋转角度的关系,于是有FF(φ)=cx(φ)。

图2 力分解示意图
凸轮曲面对弹簧顶销在旋转方向的分力产生恢复力矩Mφ(φ),曲面与弹簧顶销的接触点到转轴中心的距离r(φ)为恢复力臂[5],因此有:

在凸轮曲面任意点的弹簧力FF和旋转方向切向力Fφ之间的关系如图3所示,此点的斜率为Δx/Δφ[6],有:

对无穷小的区域求导,则有:

可以得出轮廓方程与切向力Fφ的关系式为:
联立式(5)与式(6),则有:

设想当弹簧力不受弹簧压缩变形量x和旋转角度φ的影响,FF为定值FF0,则可以得出理想化的恢复力矩Mφ与凸轮曲线方程x(φ)之间的关系式[7]:

由于l为弧长,r为半径,则有l=rφ,则:

联立方程(7)与方程(9)可以得出半径r与恢复力矩Mφ的关系式为:

最终得到曲线方程与回复力矩的关系式为:


图3 弹簧力FF和切向力Fφ的关系
2 CATIA三维建模和SimDesiger仿真计算研究[8]
2.1 凸轮曲面的三维建模
在线控开关中,凸轮曲面结构集成在开关壳体结构中固定不动,当旋钮转动时,旋钮上的转轴带动弹簧顶销转动,转轴的中心也是凸轮基圆的圆心,吕轮机构如图4所示。

图4 换档开关内部的凸轮机构图
2.2 凸轮机构运动仿真
在CAITIA中选择SD Motion Workbench模块,可以直接进入SimDesiger环境,对当前的CATIA数据进行力学及运动仿真[9]。凸轮机构仿真工作流程如图5所示。
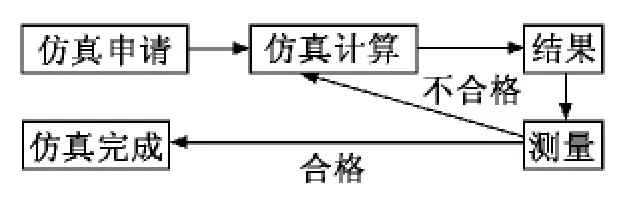
图5 运动仿真工作流程图
当测量结果与计算结果不符时,需要对各参数的设置重新进行复核,找到造成差异的根本原因,重新进行计算。
3 开关操作手感测试
经过三个月的模具加工制造和样品试装之后,我们拿到了线控换档开关的样机。理想状态下,旋转类开关的力行程曲线如图6所示。图6中,φ2为旋转档位旋转扭矩最大值对应的旋转角度值;φ1=φ2-7.5°;φ3=φ2+7.5°。

图6 旋转类开关力行程理想曲线
在工程应用中,常用参数SR1及SR2来评判旋转类开关的操作手感。SR1、SR2定义如下:

其中:M2为旋转档位旋转扭矩最大值;M1为旋转角度为φ1时对应的旋转扭矩值;M3为旋转角度为φ3时对应的旋转扭矩值。
在实际生产应用中,通常SR1及SR2在20%~40%范围内,表明开关操作手感良好。经高温处理后,开关测试及计算结果如表1所示。
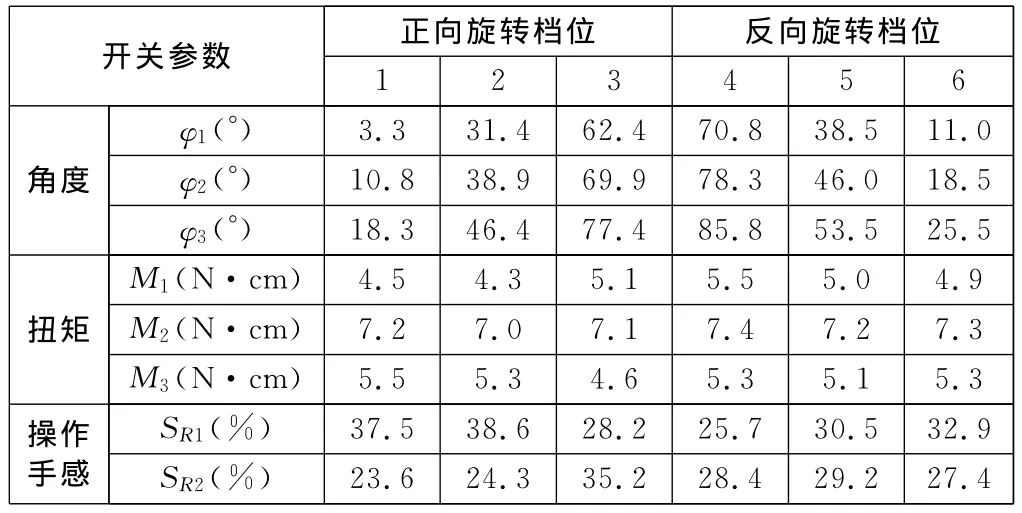
表1 线控换档开关高温处理后参数统计表
采用相同方法,依次计算高低温后、耐久后、振动后的SR1和SR2值。经计算,得到的结果均在20%~40%范围内。表明线控换档开关在高温后、低温后、耐久后、振动后,操作手感良好,符合操作手感要求。
4 总结
本论文主要研究空间凸轮机构在汽车线控换档开关中的开发及应用,主要研究成果如下:
(1)对凸轮机构的组成、应用、运动规律、凸轮机构的选型及凸轮机构的力行程曲线理论进行了阐述。
(2)应用CATIA三维建模软件对线控换档开关中的核心机械机构——凸轮曲面机构块进行了三维软件模拟,并应用SimDesige仿真计算软件进行了仿真计算验证。
(3)对实物样件展开实验分析。定义了旋转类开关手感评判参数SR1及SR2,并对其在高温后、低温后、耐久后、振动后进行了测试,绘制了力行程测量曲线。测量结果表明线控换档开关手感良好,满足操作手感要求,技术指标满足客户要求。
[1]贺炜,曹巨江,杨芙莲,等.我国凸轮机构研究的回顾与展望[J].机械工程学报,2005(6):1-6.
[2]Fu Yan-ming.Analysis and design of the globoidal indexing cam mechanism [J].Journal of Shanghai University(English Edition),2000,4(1):54-59.
[3]何仁,李强.汽车线控转向技术的现状与发展趋势[J].交通运输工程学报,2005(2):68-72.
[4]管荣法.凸轮与凸轮机构[M].北京:国防工业出版社,1991.
[5]郑晨升,葛正浩.凸轮机构从动件运动规律的通用表达式[J].机械科学与技术,1996,15(1):151-155.
[6]Fan Y Chen.凸轮机构动力学模型的建立方法[J].机械设计与研究,1987(4):43-52.
[7]Jong-Soo,Kho-Eop Yoon.Design of traverse cam for yarn winding on twisting machine[J].Fibers and Polymers,2005,6(2):151-155.
[8]林永.CATIA 在 CAD/CAE/CAM 行业的应用[M].北京:北京科技大学出版社,2000.
[9]Hans G rabowski, Reiner Anderl, Michael J Pratt.Advanced modelling for CAD/CAM systems[J].Research Reports ESPRIT,1991,7(1):21-22.
