工控计算机与PLC并口通讯的研究
2015-12-30王贵元
王贵元
江苏苏州欧瑞康巴尔查斯涂层有限公司
工控计算机与PLC并口通讯的研究
王贵元
江苏苏州欧瑞康巴尔查斯涂层有限公司
工业计算机与PLC通讯有多种方法,根据工业设备特点选择合适的通讯方式是设备可性重要的保证;本文对公司内一台瑞士巴尔查斯涂层设备主机和PLC的并口通讯方式进行了详细分析,并总结了这种方式的优点和缺点;
PVD涂层;工控机;PLC;并口通讯;
随着中国工业经济的发展,设备自动化、信息化的程度越来越高。这就要求设备既有实现复杂的运算功能,又有大规模的逻辑处理功能。一般设备的运算功能由工业计算机完成,而逻辑处理由PLC完成;工业计算机通过接口与PLC进行通讯,间接控制外围开关元件,实现设备的自动化工作。
工控机和PLC的通讯有多种方式:串行口(RS232/RS485)、并行口、网络口等。根据设备特点和工作环境选择合适和可靠的通讯方式是设备能否正常运转的重要条件之一。我公司的PVD涂层机的工控机通过PLC的I/O点和工控机以并行口方式进行通讯,简单可靠并且抗干扰能力强;本文将详细的分析其原理。
一、PVD涂层机介绍
PVD多弧离子镀的基本原理就是把金属蒸发源(靶源)作为阴极,在真空的条件下通过它与阳极壳体之间的弧光放电,使靶材蒸发并离化,形成空间等离子体,对工件进行沉积镀覆。
多弧离子镀的基本组成包括真空镀膜室、阴极弧源、基片、负偏压电源、真空系统等。
二、控制系统
巴尔查斯涂层机工作一般分抽真空、氢气刻蚀、氩气刻蚀、涂层、冷却、检漏六个阶段。每个阶段都需要进行大量PID控制计算去调节温度、辅助气体流量、蒸发电流及等离子磁场强度等;本设备采用一台工控机来实现这些运算,设备的外围元件采用日本松下的FP3型PLC来控制;如图1所示。
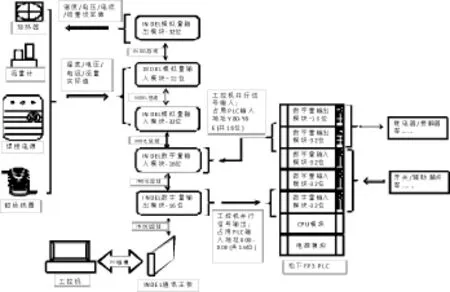
图1 涂层机控制系统示意图
三、元件型号及功能介绍
工控机:采用INOVIS公司的R20型工业计算机。产品运算能力强,速度快并有极强的稳定性。该计算机安装DOS6.22系统。通过在DOS状态下运行系统文件BARCO,计算机把内部配方文件所要求的数据转换成0-10VDC信号向需要模拟指令的元件输出,并根据反馈的实际值实时调整并监控;同时把外围数字量的控制信号通过INDEL16位的模拟量输入/输出板传递给PLC,并对PLC的状态进行监控。
PLC:采用日本松下的FP3型PLC,主要处理外围数字量信号;它通过输入/输出版上的I/O点接受工控机发过来的指令码,经过解码后输出给外围元件;同时将PLC输入/输出点的信息反馈给工控机,供工控机监控使用。
lPLC输入信号:占用X00-X0F的共16位地址,其中X0E和X0F是控制位;
X0E:工控机并行口数据读取完毕;
X0F:工控机数据准备完毕,需PLC读取;
X00-X0D:共14位,数据位;
lPLC输出信号:占用Y80-Y8F的共16位地址,其中Y8E和Y8F是控制位;
Y8E:PLC数据读取完毕;
Y8F:PLC数据准备完毕,需工控机读取;
Y80-Y8D:共14位,数据位;
INDEL总线系统:INDEL总线系统是瑞士INDEL公司开发的基于DOS环境下的一种现场总线;它的主站是一个带有PCI接口的控制板,不需要任何设置,直接插到工控机主板上的PCI插槽上,然后把驱动程序直接考入系统硬盘即可;INDEL有多种模块供选择,本设备INDEL总线配置见图1。
四、工控机和PLC通讯分析
工控机输出给PLC的命令是被PLC接收后,由PLC的程序进行译码,命令经过译码后给R500-R59F的160个中间标志位置位或复位;每个标志位都有固定含义,例如:R500-系统停止、R501-抽真空、R592启动通讯监控、R598-通讯缓冲区清零等。PLC把所有PLC输入输出点的状态反馈给工控机,供工控机进行监控。
五、PLC程序及说明
1 PLC接收程序
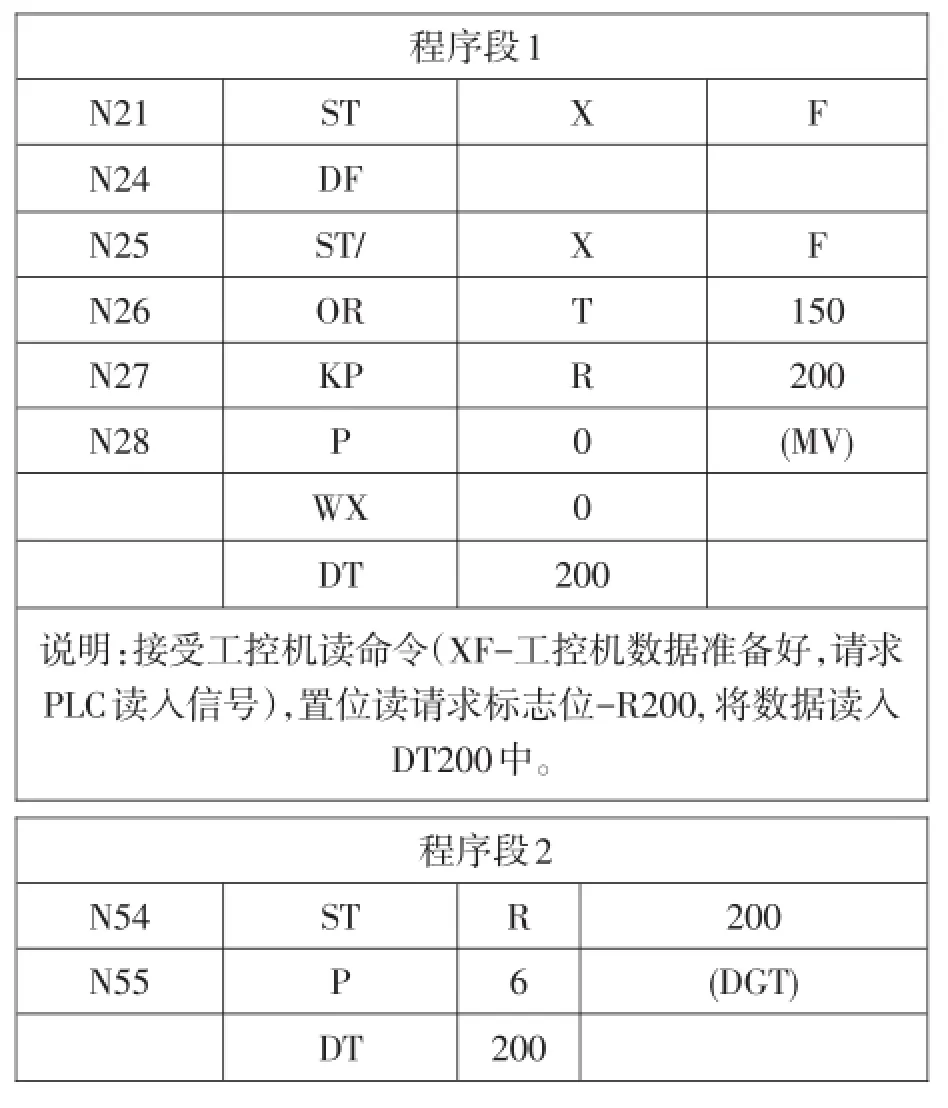
程序段1 F F N 2 1 N 2 4 N 2 5 N 2 6 N 2 7 N 2 8 S T D F S T / O R K P P W X D T X X T R 0 0 1 5 0 2 0 0 ( M V ) 2 0 0说明:接受工控机读命令(X F -工控机数据准备好,请求P L C读入信号),置位读请求标志位-R 2 0 0 ,将数据读入D T 2 0 0中。程序段2 N 5 4 N 5 5 S T P D T R 6 2 0 0 ( D G T ) 2 0 0
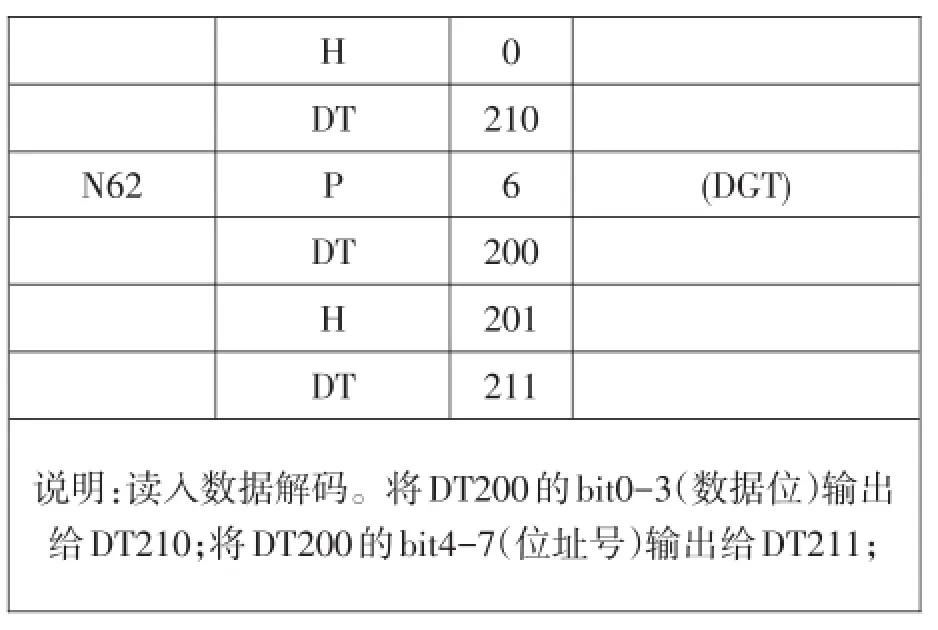
H 0 N 6 2 ( D G T ) D T P D T H D T 2 1 0 6 2 0 0 2 0 1 2 1 1说明:读入数据解码。将D T 2 0 0的b i t 0 -3(数据位)输出给D T 2 1 0;将D T 2 0 0的b i t 4 -7(位址号)输出给D T 2 1 1;
2PLC发送输入输出点状态数据
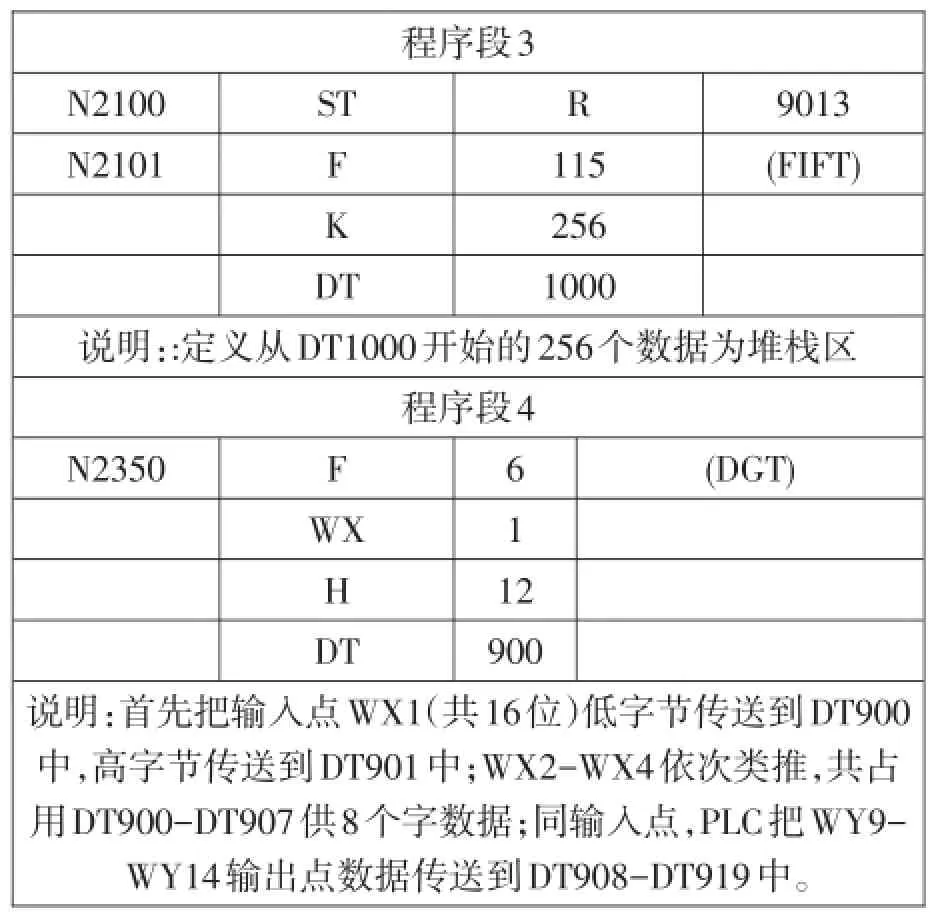
程序段3 N 2 1 0 0 N 2 1 0 1 S T R F K D T 1 1 5 2 5 6 1 0 0 0 9 0 1 3 ( F I F T )说明::定义从D T 1 0 0 0开始的2 5 6个数据为堆栈区程序段4 N 2 3 5 0 F ( D G T ) W X H D T 6 1 1 2 9 0 0说明:首先把输入点W X 1(共1 6位)低字节传送到D T 9 0 0中,高字节传送到D T 9 0 1中;W X 2 -W X 4依次类推,共占用D T 9 0 0 -D T 9 0 7供8个字数据;同输入点,P L C把W Y 9 -W Y 1 4输出点数据传送到D T 9 0 8 -D T 9 1 9中。
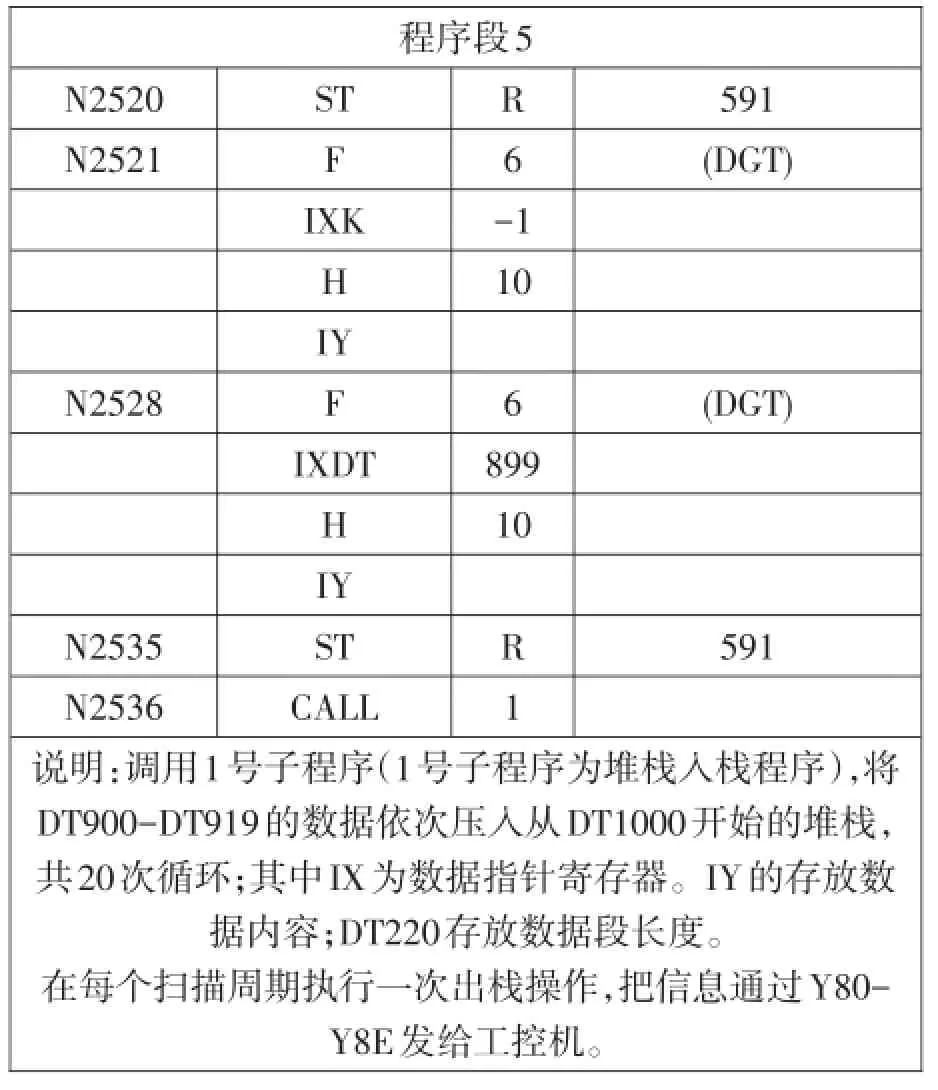
程序段5 N 2 5 2 0 N 2 5 2 1 5 9 1 ( D G T ) 1 0 N 2 5 2 8 S T F I X K H I Y F I X D T H I Y S T C A L L R 6 -1 6 ( D G T ) 8 9 9 1 0 N 2 5 3 5 N 2 5 3 6说明:调用1号子程序(1号子程序为堆栈入栈程序),将D T 9 0 0 -D T 9 1 9的数据依次压入从D T 1 0 0 0开始的堆栈,共2 0次循环;其中I X为数据指针寄存器。I Y的存放数据内容;D T 2 2 0存放数据段长度。在每个扫描周期执行一次出栈操作,把信息通过Y 8 0 -Y 8 E发给工控机。R 1 5 9 1
束语
这种工控机和PLC的通讯因为把PLC的输入/输出模块模拟成并行口进行通讯,效率不高,但是可靠性很好,特别适用现场有强磁场和干扰而通讯量不大的工况。
[1]欧瑞康巴尔查斯公司.BAI1200涂层机操作手册,2003(07).
[2]松下自动控制有限公司.FP系列PLC硬件手册,2000(12)
[3]松下自动控制有限公司.FP3系列PLC编程手册,2004(09)
6 总结
21世纪是机器人和互联网的世纪,自机器人和互联网问世,他们改变了人类世界的方方面面,无论在生活、工业生产、环境保护等等。本次物联网安放机器人的研发与应用中,我深刻体会到了物联网和机器人相结合的美丽之处与人类伟大所在。同时再设计机器人的同时对我以后的学术发展有了启蒙作用。
在机器人的制作过程中,很多东西对我这种高中机器人设计师来说都是很陌生的。因此鄙人在很多软件和硬件方面多的问题请教了很多在此方面颇有成就的人。有很多比较现实的问题也在困扰着机器人的设计。但是正是因为这些问题才让我了解到了如何做一名优秀的机器人设计师。
参考文献:
[1]维基百科物联网词条
[2]中华人民共和国第十二五物联网规划
[3]工业机器人盖伦
[4]百度百科物联网发展词条
[5]杨士元,清华大学自动化系,中国智能家居的现状和发展
王湧钦(1997-),男,籍贯:河南新野,现为高中学生。
