基于差动制动的客车防侧翻控制研究
2015-12-29严世榕严钟辉
严世榕,严钟辉
(福州大学机械工程及自动化学院,福建福州 350116)
0 引言
随着我国公路里程的进一步增长、旅游行业的兴起、机动车保有量的增长以及人们对人身安全重视程度的加深,汽车的安全问题越来越得到人们的重视.每年,我国因交通事故死亡人数有数万人,其中侧翻事故是伤亡率仅次于正面碰撞的交通事故.客车由于其乘客量大、整车质心高质量大等特点,当客车与轿车发生正碰或者追尾时,客车内乘员一般受伤较轻,而一旦客车发生侧翻事故则容易发生群死群伤的情况.
在客车侧翻事故中,高速紧急转向工况下导致的侧翻事故是客车的主要侧翻事故之一.当地面附着系数较小时,车辆会先发生侧滑,严重侧滑时容易发生绊倒性侧翻,地面附着系数较大时,汽车会在发生侧滑之前就发生非绊倒性侧翻[1].传统横摆稳定控制忽略了附着系数较高时车辆的侧翻危险[2],而单纯的防侧翻控制又没考虑到抗侧翻后车辆追踪驾驶员驾驶意图轨迹的需求[3].本研究通过差动制动作用原理,建立横摆稳定性和侧倾稳定性集成控制系统,通过ABS控制各轮制动力矩大小,优先控制客车侧倾稳定性能.在满足侧倾稳定性的要求下,使客车的实际横摆角速度尽可能接近理想横摆角速度.
1 客车整车模型建立
根据国内某客车结构尺寸在Adams/Car中建立客车模型(见图1),客车模型由各个子系统装配而成,它们分别为:
1)客车车身,简化为一个具有转动惯量的质量块;
2)制动系,采用Adams自带的四轮盘式制动系统;
3)前双摆臂独立空气悬架系统,空气弹簧和阻尼器的动力学特性通过建立相应的属性表进行赋予;
4)客车轮胎,采用Adams自带的Pac 2002轮胎属性文件,该轮胎模型适用于操纵稳定性的研究;
5)平行杆式转向系统,通过齿轮齿条的相对运动来进行车辆的转向操作;
6)后四连杆非独立空气悬架系统;
7)客车发动机系统.
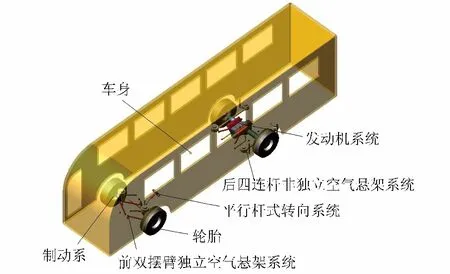
图1 客车整车虚拟模型Fig.1 The virtual prototype model of bus
其中:各个子系统之间通过通讯器进行数据的传递[4].该客车整车模型充分考虑了悬架刚度、车辆轮胎特性、驾驶员的操纵行为、发动机特性等因素对车辆行驶稳定性能的影响,且各系统运动和响应与实车接近,因此可以较为真实准确地反应实车试验结果.
2 各个车轮制动力控制的效果
差动制动控制主要是通过对车辆某个车轮进行单独制动,从而产生附加的横摆力矩用以改变车辆的运动状态,维持车辆横摆稳定性和侧倾稳定性[5].从图2可以看出,在不同车轮上逐渐增加制动力对汽车横摆力偶矩的影响程度不同.其中,前外轮和后内轮在制动力逐渐增加时,对横摆力偶矩的影响最大.作用在前外轮的制动力产生一个向外侧的附加横摆力偶矩,使汽车趋于不足转向;而作用在后内轮的制动力则会产生一个向内侧的附加横摆力偶矩,使汽车趋于过度转向.
差动制动装置作用原理就是通过传感器检测车辆各个行驶工况的状态量,根据各个状态量值的大小触发不同稳定性控制系统的启动,产生不同的横摆力矩控制效果.同时,为了获得较大的纵向附着系数和防止制动时车轮抱死导致车辆发生侧滑,通过ABS调节制动油缸制动压力,将车轮滑移率控制在最佳范围内,以获得最大纵向制动力和足够的侧偏力[6].
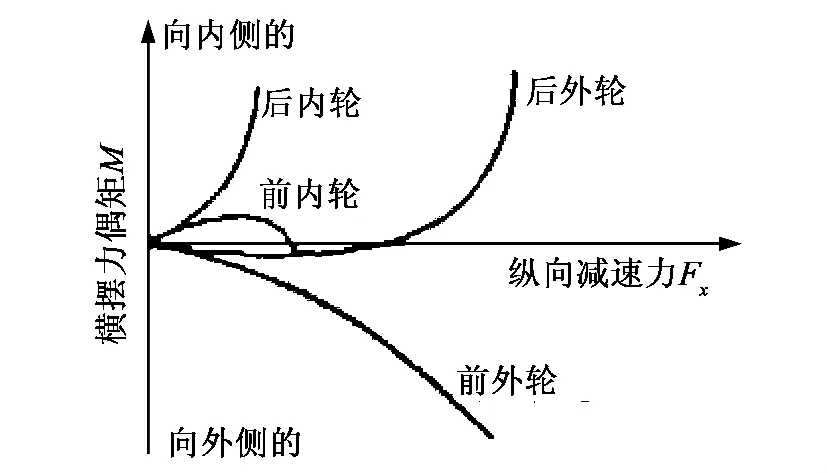
图2 各个车轮上作用制动力时所产生的横摆力偶矩Fig.2 The yaw moment of couple generated by braking force on differential wheel
3 客车防侧翻控制的控制原理
3.1 客车横摆稳定控制原理
将客车模型简化为线性二自由度模型(见图3),可以得到车辆名义横摆角速度[7]:
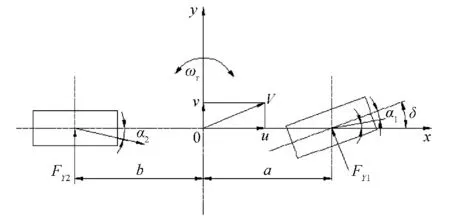
图3 二自由度车辆模型Fig.3 2 - D of vehicle model

其中:

u为客车车速;δ为前轮转角;m为整车质量;l为轴距;a、b分别为质心到前后轴中心线的距离;k1、k2分别为前后轮的总侧偏刚度.
汽车侧向加速度与横摆角速度联系公式为ay=+ωu,其中,侧向速度的变化率,当汽车不发生侧滑时可以忽略不计.为使汽车不发生侧滑,应使得ay≤ay,max(ay,max=μg为质心理论最大侧向加速度,μ为轮胎与地面摩擦系数),极限横摆角速度则为:


为保证汽车具有较好的横摆角速度响应和操纵稳定性,汽车实际横摆角速度ωr和理想横摆角速度ωrd之差Δω应满足下列关系不等式:

其中:Δr为ωr与ωrd所能接受的最大差值,Δr的大小与车速、前轮转角有关,当车速、前轮转角较小,Δr可较大;当车速、前轮转角较大时,车辆更容易失稳,Δr可相应减小. Δω反映了车辆偏离理想状态的程度,当满足不等式(4)时,则认为车辆处于稳定行驶状态;反之,认为车辆处于不稳定行驶状态,启动横摆稳定控制系统进行控制.横摆角速度的正负号由车辆坐标系确定,规定车辆向左为正向,通过检测前轮转角可以知道行驶方向.根据差动制动的力学特性分析,不同行驶状态下横摆稳定控制选取的制动轮如表1所示.

表1 横摆稳定制动轮选取逻辑Tab.1 The selection logic of braking wheel for yaw stability
选定制动轮后,通过建立横摆模糊控制器来确定制动轮的力矩大小,以Δω及其变化率为模糊控制器的输入量,根据建立的模糊规则对输入量进行模糊决策后,输出各轮的控制力矩大小.同时,为了防止制动时车轮抱死,在制动轮滑移率值超过目标滑移率时,各轮的控制力矩改由ABS进行控制.
横摆稳定性控制虽可提高车辆的横摆稳定性,但忽略了对汽车侧倾稳定性的控制.在地面附着系数较大时,车辆会先发生过度侧倾导致严重的侧翻事故发生.为此,必须对客车的侧倾稳定性加以控制.
3.2 客车侧倾稳定控制原理
将Adams中较为复杂的多自由度整车模型简化为如图4的三自由度客车模型进行分析.将客车整车运动分为纵向运动、横摆运动以及侧倾运动,把客车悬架等效为抗侧倾弹簧和阻尼,忽略其中侧向风和非簧载质量的影响,得到客车侧倾稳定性动力学方程[8]:

图4 客车简化模型Fig.4 The simplified bus model

其中:ms为整车质量;h为质心到侧倾中心的高度;T为轮距;Ix为绕侧倾中心转动惯量;Kφ为悬架侧倾刚度;Cφ为悬架侧倾阻尼系数;φ为侧倾角.
汽车发生侧倾时,车轮的垂直载荷会发生转移.当一侧车轮垂直载荷降为0时,车轮离地,车辆发生侧翻危险.左右车轮的垂直载荷变化程度可以用横向载荷转移率来表示,横向载荷转移率定义为:

其中:Fl,Fr分别为汽车左右轮所受的垂直载荷力.LTR变化范围为[-1,1].为避免汽车发生侧翻,应使得汽车横向载荷转移率绝对值小于1,考虑到车辆行驶时侧向风和路面坡度的影响,一般设置极限值为 0.9.
车辆稳定时,侧倾角一般较小,此时φ≈tanφ,联合上面(5)、(6)式可以看出:

由式(5)可以看出侧倾角只与侧向加速度和车辆结构有关,引入侧倾率Rφ,则有:

从式(9)可以看出,LTR与车辆的结构、侧向加速度等因素相关.通过降低车辆质心高度、增大轮距、减小侧向加速度可以提高客车的防侧翻能力.差动制动控制主要通过减小客车横摆角速度来抑制客车侧翻.这里将作为启动侧倾稳定控制系统的判断因子和控制目标.当满足下列不等式时,则认为客车没有侧翻危险;反之则启动侧倾稳定控制.即:

其中:Rt为设置的侧翻阈值,Rt要综合考虑防侧翻控制效果和汽车正常行驶需求.侧翻阈值过小,导致差动制动启动过于频繁容易造成驾驶员恐慌,同时,也会在一定程度上影响驾驶员的正常行驶意图.而阈值过大,不能起到有效及时的防侧翻效果.考虑到汽车驾驶员的正常行驶需求和防侧翻效果的综合因素,我们设置防侧翻控制因子侧翻阈值为0.75,不同转向状态下,侧倾稳定控制选取的制动轮如表2所示.

表2 侧倾稳定制动轮选取逻辑Tab.2 The selection logic of braking wheel for rollover stability

3.3 横摆和侧倾集成控制原理
汽车行驶稳定性控制直接受横摆力矩的影响,差动制动通过产生干预横摆力矩来实现车辆动力学控制.利用产生的附加横摆力矩抵消不稳定的横摆力矩,来维持车辆横摆和侧倾稳定性.在车辆转向行驶过程中,横摆危险不管是在高附着系数还是低附着系数路面上都有可能存在,而非绊倒性侧翻危险只有在路面附着系数较高时才存在[9].横摆和侧倾集成控制的主要思路是:当汽车只有横摆危险时,仅触发横摆稳定性控制系统;当汽车仅有侧翻危险时,仅触发侧倾稳定性控制系统;当兼有横摆和侧翻危险时,则根据车辆不同行驶状态,实行不同的集成控制策略.横摆稳定性和侧倾稳定性同时触发有两种情况:
1)车辆过度转向且侧翻因子超过侧翻阈值,横摆和侧倾稳定控制系统都会触发前外轮车轮制动,两者有相互促进的作用,都是使车辆趋近不足转向.此时,集成控制系统中的制动轮力矩为横摆和侧倾模糊控制器输出力矩之和.
2)车辆不足转向且侧翻因子超过侧翻阈值,横摆稳定性控制触发后内轮制动使车辆趋近过度转向,侧倾稳定性系统则会触发前外轮制动使车辆更加趋近不足转向.由于客车质量大、重心高、乘员多,发生侧翻造成伤亡程度要远大于转向不足导致的正碰.因此集成控制系统以侧倾控制为优先控制,当大于侧翻阈值时,不对客车进行横摆稳定控制;只有小于侧翻阈值时,才进行相应的横摆稳定控制.
4 客车极限工况的联合仿真
采用上述集成控制系统控制逻辑在Matlab/Simulink中建立横摆和侧倾集成稳定控制系统.通过Adams软件对客车在不同路面下不同极限行驶工况进行模拟仿真.在Adams/Control模块中建立相应的输出和输入状态变量,这里以车辆车速、横摆角速度、方向盘转角、4个车轮轮速和载荷力为输出状态变量.从式(3)可以知道,通过设置的传感器检测车速、方向盘转向角、路面附着情况就可以确定出理想横摆角速度.从式(6)可以看出,通过检测各轮载荷力可以确定LTR的实时状态量.以四轮制动力矩为输入状态变量,各轮制动力矩大小由在Matlab/Simulink中建立的集成控制系统、横摆稳定控制系统进行控制.通过对比无控制、横摆稳定性控制、集成控制三种不同控制的仿真结果进行分析.
4.1 J-turn角阶跃转向
J-turn角阶跃仿真是指驾驶员对方向盘以阶跃的方式进行输入,使车辆进入匀速圆周运动的行驶工况[8].Adams虚拟样机可以实现物理实验样机难以或者无法实现的极限行驶工况.具体设置为:设置客车初始行驶速度为100 km·h-1,客车从0~1 s的时间内客车保持直线行驶,1~3 s客车方向盘转向值以阶跃函数形式从0°转到转向的极限角度使客车从直线行驶转为向左行驶,从3 s后到6 s仿真结束时,客车方向盘保持以极限转向角度行驶直至仿真结束.在路面附着系数为0.6上进行仿真输出,结果如图5~7所示.
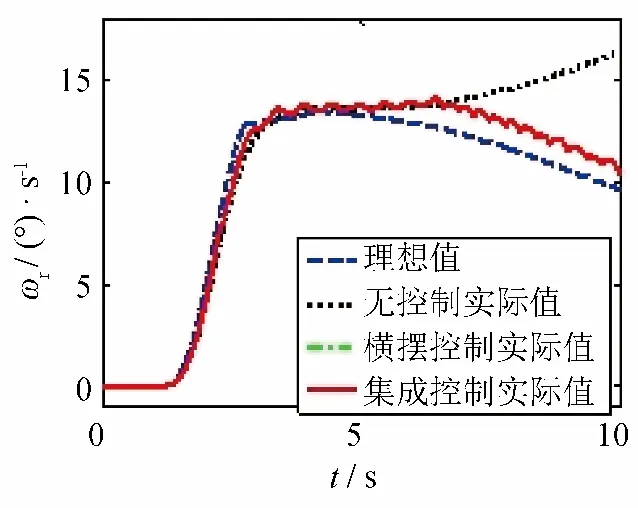
图5 横摆角速度曲线(附着系数为0.6)Fig.5 Yaw velocity with adhere coefficient 0.6
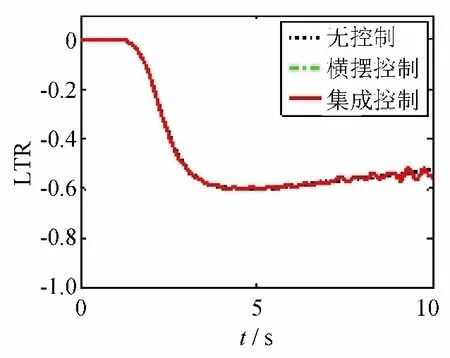
图6 LTR对比曲线(附着系数为 0.6)Fig.6 LTR curve with adhere coefficient 0.6

图7 侧偏角与其速度的相位图(附着系数为0.6)Fig.7 Phase plane between sideslip angle and its velocitywith adhere coefficient 0.6
图5显示,无控制的客车横摆角速度在方向盘维持不变后,横摆角速度迅速增大.从图6可以看出,在附着系数为0.6的路面上,路面无法提供足够的侧向力,此时车辆没有发生侧翻的危险,集成稳定控制系统不进行侧倾稳定控制.由于路面附着系数较低,高速大幅度紧急转向车辆产生的侧向力使轮胎处于附着饱和状态.从图7可以看出,此时车辆处于不稳定行驶工况,车辆发生了严重的侧偏甚至侧滑,客车无法按照驾驶员的驾驶意图行驶;经过横摆控制后,车辆横摆实际值与理想值虽然有一定的误差,但是仍然在允许的范围内,且变化趋势和理想横摆角速度一致,对理想横摆角速度跟踪效果比较好.侧偏角和侧偏角速度相位图显示此时车辆恢复稳定,车辆没有失稳,客车的横摆稳定性得到了改善.
为了验证集成稳定控制在高附着路面高速紧急转向下的控制效果,在附着系数为1的路面上进行同样的J-turn极限行驶工况仿真,输出的仿真结果如图8~10所示.
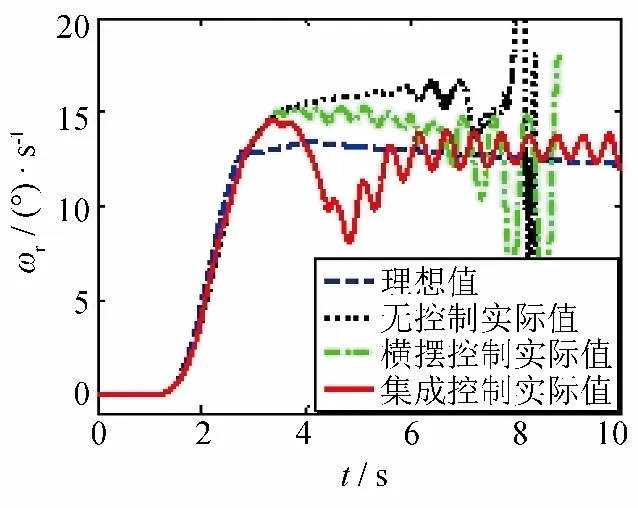
图8 横摆角速度曲线(附着系数为1)Fig.8 Yaw velocity with adhere coefficient 1
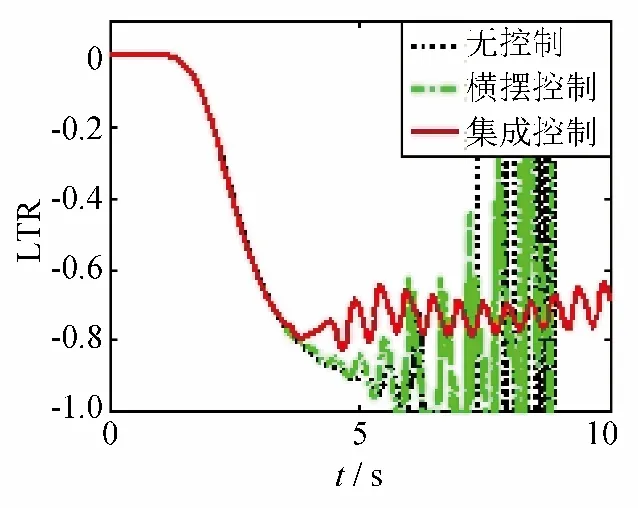
图9 LTR对比曲线(附着系数为1)Fig.9 LTR curve with adhere coefficient 1
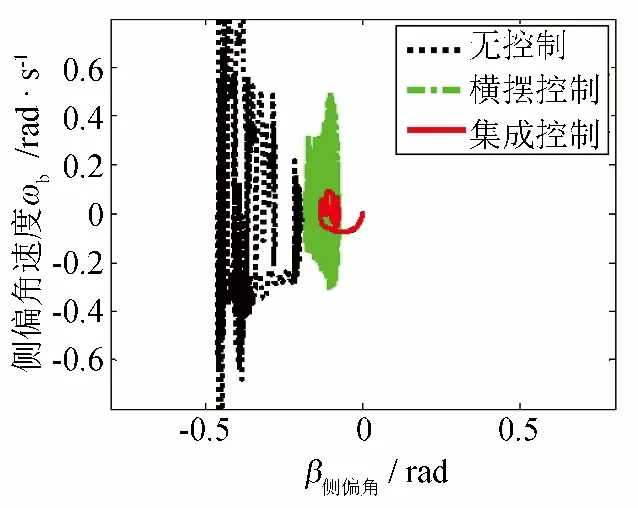
图10 侧偏角与其速度的相位图(附着系数为1)Fig.10 Phase plane between sideslip angle and its velocity with adhere coefficient 1
从图8可以看出,在附着系数为1的路面上高速过度转向行驶,且无控制时,随着前轮转角的增大,侧向加速度逐渐加大,车辆的横向载荷转移率达到了危险范围内,同时,由于车辆的过度侧倾产生的侧倾转向使得车辆有过度转向的倾向,然后在6 s后车辆发生侧翻;经过横摆控制后,车辆在前期阶段可以较好跟踪驾驶员驾驶意图轨迹,但是由于没有考虑到侧倾方面的控制,在超过侧翻阈值后,没有对其进行有效的侧倾控制,导致客车侧倾现象越来越严重,并最终也发生了侧翻;与单独横摆稳定控制不同,在值达到侧翻阈值后,采用集成控制的客车通过横摆和侧倾稳定的集成控制产生的干预横摆力矩降低了车辆横摆角速度,有效抑制了客车的过度侧倾.虽然在控制过程中发生了一定不足转向,但是从图10可以看出客车仍然处于稳定的行驶工况,同时在侧翻因子降到安全范围后,通过集成控制也能使得车辆的实际横摆角速度值迅速接近理想值.可见,经过集成控制后,客车的侧翻稳定性有了较好的改善,同时又能保持一定的轨迹追踪能力.
4.2 Fishhook 转向仿真
为了验证集成控制系统在客车不同转向行驶时控制效果,对客车模型进行Fishhook转向行驶模拟仿真(路面附着系数为1).具体设置为:客车以100 km·h-1的初始速度行驶,在0~2 s内客车驾驶员操纵方向盘使客车向左转向到极限位置,在2~5 s内驾驶员维持方向盘不动,在5~7 s内反打方向盘到右向极限位置后,在7~10 s仿真结束维持右向转向盘位置不变.仿真后结果如下图11~13所示.

图11 横摆角速度对比曲线Fig.11 The contrast curve of yaw velocity
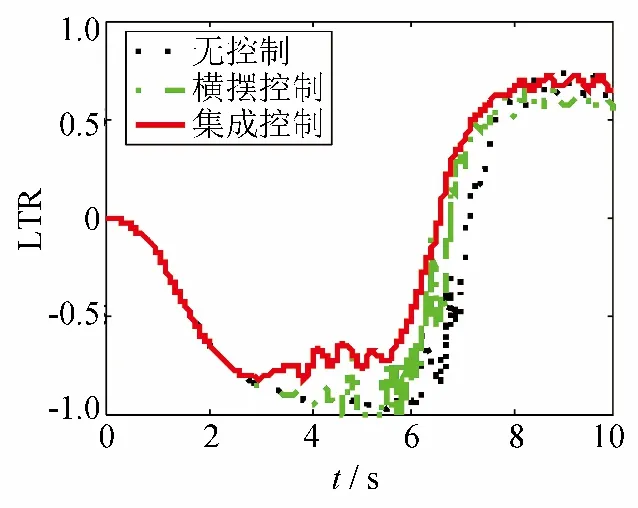
图12 LTR对比曲线Fig.12 The contrast curve of LTR

图13 侧偏角与侧偏角速度的相位图Fig.13 The phase diagram of sideslipangle and sideslip angle velocity
仿真结果显示:经过横摆控制后,客车具有较好的横摆稳定性,但是其侧翻因子和无控制系统一样超过了设置的侧翻极限值,在实车实验时很有可能已经发生侧翻;经过集成控制后,客车在不同转向行驶工况侧翻因子都在安全范围内,为了维持侧倾稳定性,在3~4 s时,对驾驶员的过大转向操作进行干预,通过差动制动产生的附加横摆力矩使客车趋近不足转向,利用车辆的横摆与侧倾动力学耦合关系来抑制客车的侧翻.在客车没有侧翻危险时,集成控制通过对后内轮采取制动来纠正客车的不足转向,使实际横摆角速度值能够迅速接近理想值.分析认为,在不同转向行驶工况下,经过集成控制可以在一定程度上提高客车的横摆和侧倾稳定性能.
