基于飞行模拟的过失速机动试飞驾驶方法研究
2015-12-28杨挺健
杨挺健
(中国飞行试验研究院 科技部,陕西 西安710089)
0 引言
具备过失速机动能力是第四代战斗机的主要标志之一。过失速机动不要求很高的过载,而是凭借飞机的快速俯仰能力使其迅速进入过失速区,并绕速度轴旋转,实现飞机姿态与航迹的解耦,以获得快速的机头指向或机身瞄准能力[1-2]。过失速机动的上述特点导致其试飞时在试验状态、试验程序、操纵方法、注意力分配原则和评定方法等方面与常规机动的试飞任务有很大的区别。航空发达国家不但突破了第四代战斗机推力矢量、非线性飞行控制和飞推综合控制等关键技术,为F-22和T-50等新型号的研制奠定了基础,而且在过失速机动试飞方法、敏捷性指标、飞行品质评价等飞行试验技术方面也做了大量的研究,许多试飞技术已在飞行试验中得到了验证和应用[3]。我国已在过失速机动飞行机理、推力矢量技术和非线性控制技术方面开展了大量研究并取得了一些突破[4-5],但在过失速机动飞行试验方法、程序以及化解技术风险的措施等方面还不完善,未形成成熟的过失速机动试飞方法。
本文根据过失速机动飞行试验模拟验证的需要,开展了基于非线性动态逆的过失速飞行控制律的仿真建模技术研究,依托大型地面模拟设施,建立了人在回路的过失速机动飞行模拟环境。通过开展人在回路的过失速机动地面模拟试验,研究并形成了一套包括进入条件、操纵方法、注意力分配原则和退出方法在内的带推力矢量的飞机过失速机动试飞驾驶方法。
1 过失速机动飞行仿真建模
在过失速飞行条件下,由于机翼和机身上的气流会出现分离、形成各种脱体涡系和涡破裂,这时作用在飞机上的气动力呈现很强的非线性和非定常迟滞效应[6],在一定条件下,受气流分离、涡形成和破裂的随机性影响会伴随产生非对称气动力和力矩,同时由于操纵面效率锐减甚至失效,需要使用推力矢量弥补操纵面控制能力不足的问题。因此,基于线性定常系统的经典控制律设计方法已不适用。为了解决过失速机动飞行的控制问题,需要采用非线性控制方法。目前,在众多的非线性控制系统设计方法中,非线性动态逆原理的应用较为广泛[7]。因此,根据奇异摄动原理,将控制律的设计分为快变量回路控制器和慢变量回路控制器,并对其分别进行了设计;根据动态逆原理的特点,对反馈所需的气动力模型进行简化,建立了推力矢量发动机模型,最终通过内外回路的综合完成了整个过失速机动飞行控制律的设计。
1.1 内回路控制律设计及其建模
采用非线性动态逆原理进行角速率一级快变量的内环控制律设计,由刚体飞机转动运动方程改写成的仿射方程为[8]:
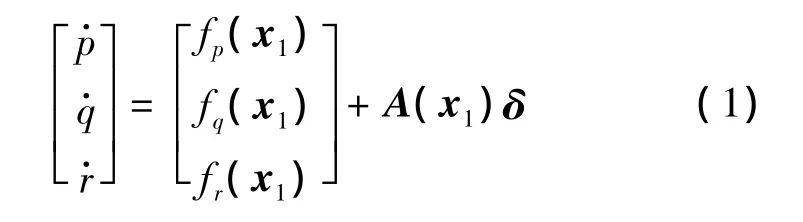
其中:

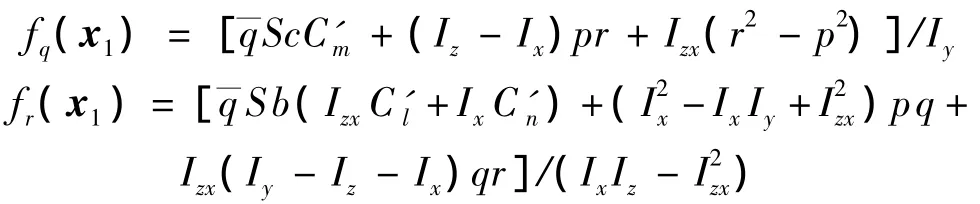
式中:x1=(V,α,β,p,q,r,θ,φ,h)T为耦合的飞行状态;A(x1)为控制矩阵(这里亦为Falb-Wolovich矩阵或解耦矩阵);δ为操纵面偏转量,如系统有常规操纵面及偏航-俯仰推力矢量控制,则可记δ=(δe,
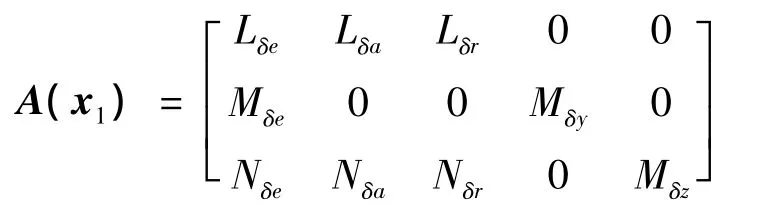
其中:
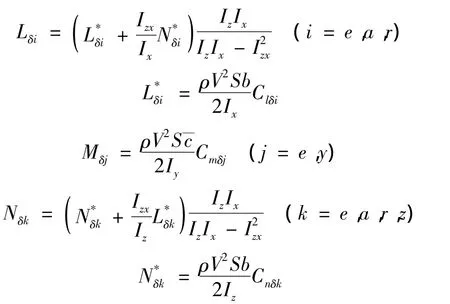
在完成飞机刚体转动方程的仿射方程式(1)的推导后,即可应用非线性动态逆原理进行内环的控制律设计,控制律框图如图1所示。图中,A-1为A(x2)的逆矩阵;符号开关①~③表示气动舵面和推力矢量的控制融合方案[8],①表示“花链饱和式”融合方案,②表示最小控制能量式融合方案,③表示上述两种融合方案的结合,即在一种融合方案失效后自动切换至另一种。
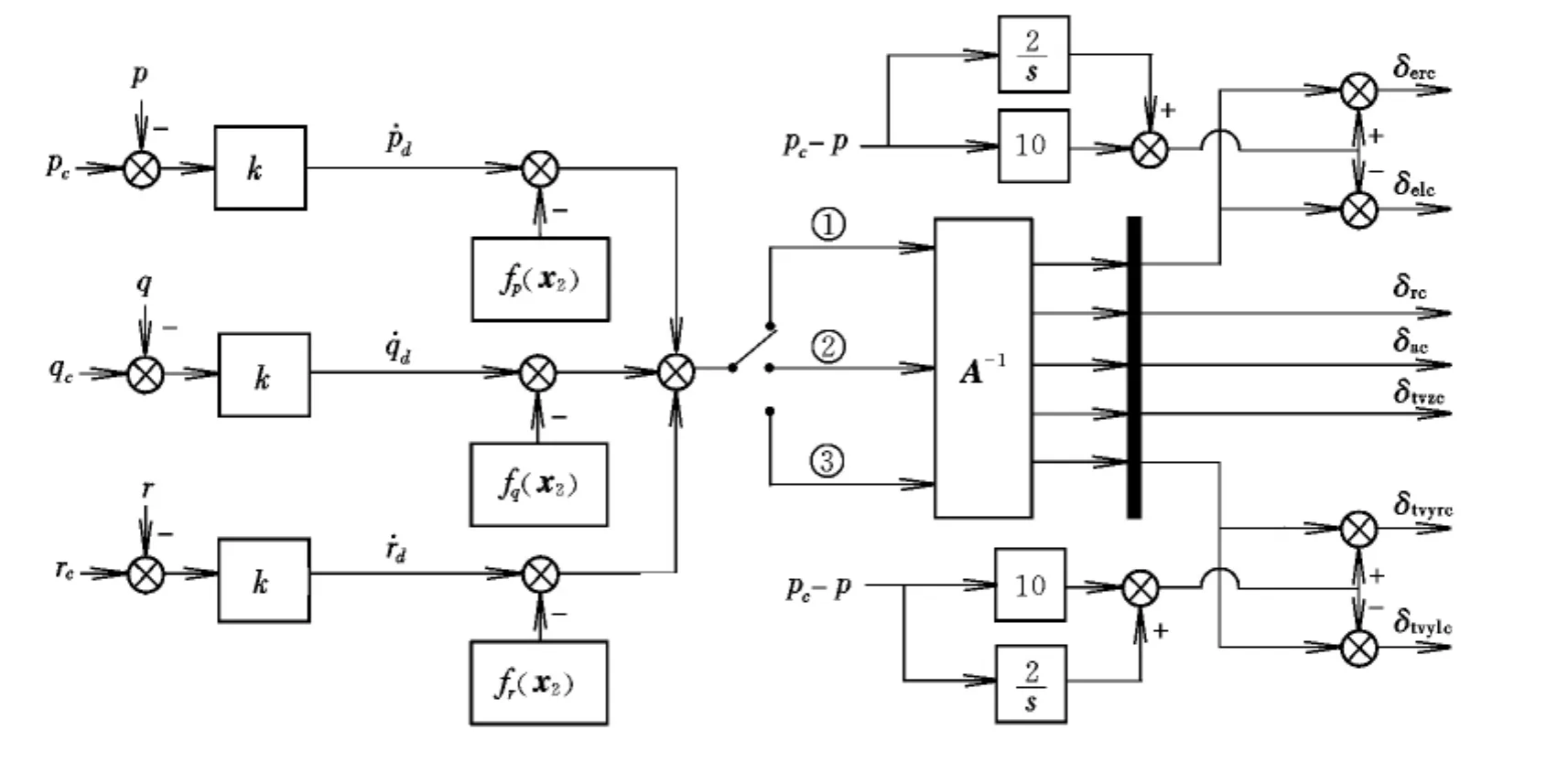
图1 过失速机动飞行控制系统内回路控制律框图Fig.1 Post stall maneuver flight control system inner loop control law
1.2 外回路控制律设计及其建模
应用非线性动态逆原理进行慢变量外环控制律设计,由刚体飞机线运动方程改写成的仿射方程形式如下[8]:
其中:
式中:x2=(V,α,β,θ,φ,h)T为耦合的飞行状态。
完成刚体飞机线运动方程的仿射方程式(2)的推导后,就可以应用非线性动态逆原理进行外环的控制律设计,控制律框图如图2所示。
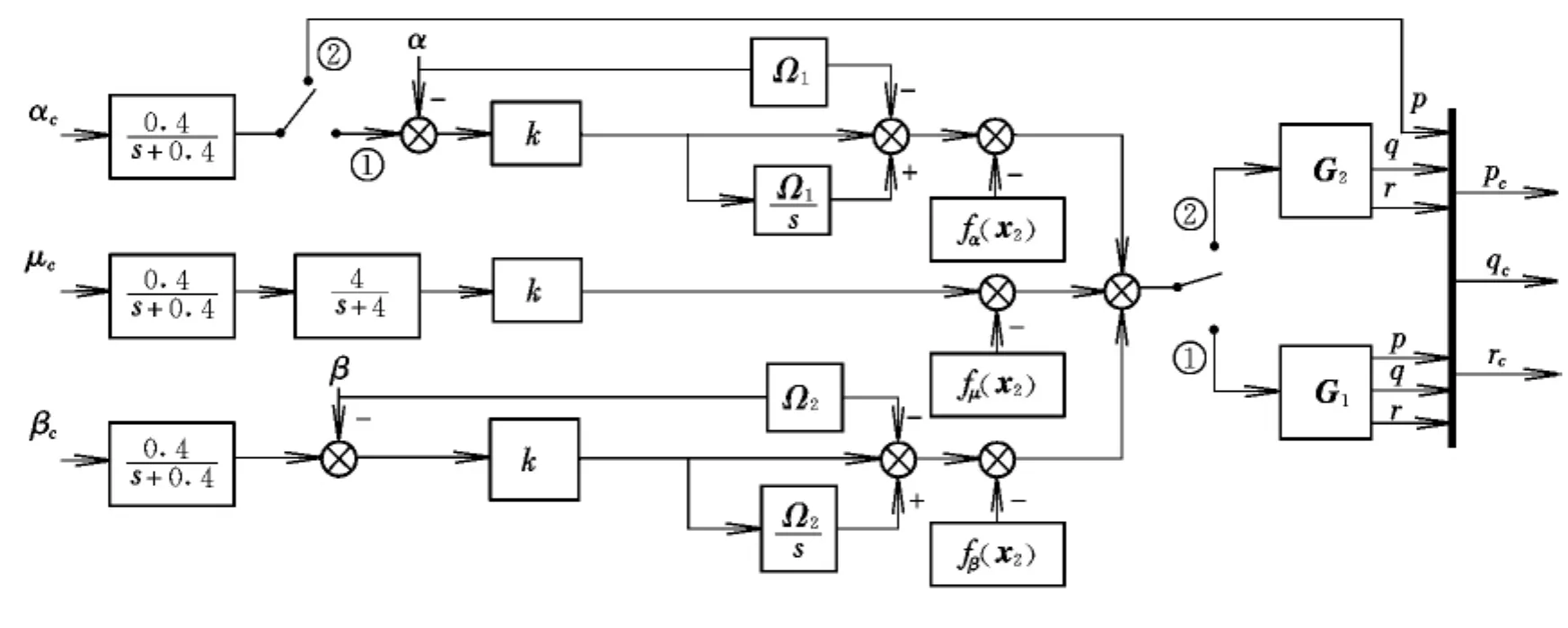
图2 过失速机动飞行控制系统外回路控制律框图Fig.2 Post stall maneuver flight control system outer loop control law
为了满足不同飞行阶段及任务要求的控制需要,外回路控制律在俯仰方向设计了两种指令模式,符号开关①和②分别对应这两种指令模式。其中:①表示俯仰操纵以迎角指令的控制模式进行控制,G1为与之对应的G(x2)的逆矩阵;②表示俯仰操纵以俯仰角速率指令的控制模式进行控制,G2为与之对应的逆矩阵。图2中的k和Ω为增益系数。
2 人在回路的过失速机动飞行模拟环境
为了开展过失速机动试飞方法研究,依托全任务飞行模拟系统,在完成带推力矢量飞机飞行仿真建模的基础上,建立了过失速机动飞行模拟环境,主要包括:控制台、模拟座舱、航电系统、操纵人感系统、视景系统、六自由度运动系统等硬件设施;配套的软件模块包括:飞行仿真、航电仿真、音响仿真等一些专有软件模块;系统还包含网络支撑环境和其他辅助设施。
仿真软件是过失速机动飞行模拟系统的核心,它是在原飞机常规飞行软件基础上应用了推力矢量、大迎角、非定常气动力建模和过失速机动飞行控制等技术,使软件具有模拟过失速机动飞行的能力,为开展过失速机动试飞方法研究奠定了基础。图3为飞机过失速机动飞行软件流程。

图3 飞机过失速机动飞行仿真软件流程Fig.3 The flight simulation software process of post stall maneuver
3 过失速机动试飞驾驶方法及其模拟验证
目前已经在飞机上实现的典型过失速机动有10余种,包括在纵向平面内的机动(“眼镜蛇”、“尾冲”、“榔头”等)和空间机动(“J转弯”、“直升机”等)。针对这些典型的过失速机动动作,通过理论分析、仿真计算以及人在回路的地面模拟试验,研究并形成了一套包括进入条件、操纵方法、注意力分配原则和退出方法在内的带推力矢量的飞机过失速机动试飞驾驶方法,并利用过失速机动飞行模拟环境进行了验证。由于篇幅所限,本文仅就“眼镜蛇”和“J转弯”机动的驾驶方法和验证情况进行介绍。
3.1 “眼镜蛇”机动
“眼镜蛇”机动是指飞机从初始平飞状态迅速拉杆到底,快速形成大迎角(瞬态可高达120°),此时飞机快速减速,然后推杆,使飞机下俯,恢复到正常迎角状态。该机动的特点是飞机只发生俯仰方向的运动,横向没有运动。
该试验选取了多名有丰富飞行经验的试飞员在过失速机动飞行模拟环境下进行了验证试飞。试飞的进入条件在高度为2~5 km,表速为350~550 km/h的状态下,俯仰操纵指令选择迎角指令类型;配平飞机后并保持5~10 s,迅速拉杆到底,当俯仰角超过90°时保持3~4 s,在2~3 s内匀速回杆至配平位置并适当向前推杆退出机动。该机动动作成功的判据有两点:一是迎角达到90°或以上,并保持3~4 s,二是飞机没有明显的横向和航向偏离。在操作时试飞员需注意避免加入横向和航向的输入,并打开发动机加力,以保持飞机有足够的动能。
图4为“眼镜蛇”机动的地面模拟试验结果。由试验结果可知,飞机从2.5 km,400 km/h进入机动,机动过程中飞机俯仰速率达70(°)/s,在7~8 s内迅速减速至108 km/h,迎角在110°附近保持长达6 s。整个机动过程中飞机的高度变化很小,且横航向未出现偏离。按照本文设计的试飞驾驶方法,驾驶员能够很好地完成“眼镜蛇”机动。
驾驶员对整个动作过程的评述是:采用迎角模式实施该机动,无论是机动的进入、迎角的建立和保持还是退出都非常容易控制,俯仰姿态判读容易,迎角相对困难,整个机动过程中飞机未出现非指令性响应。多名驾驶员的“库伯-哈珀”评价等级均值为2。
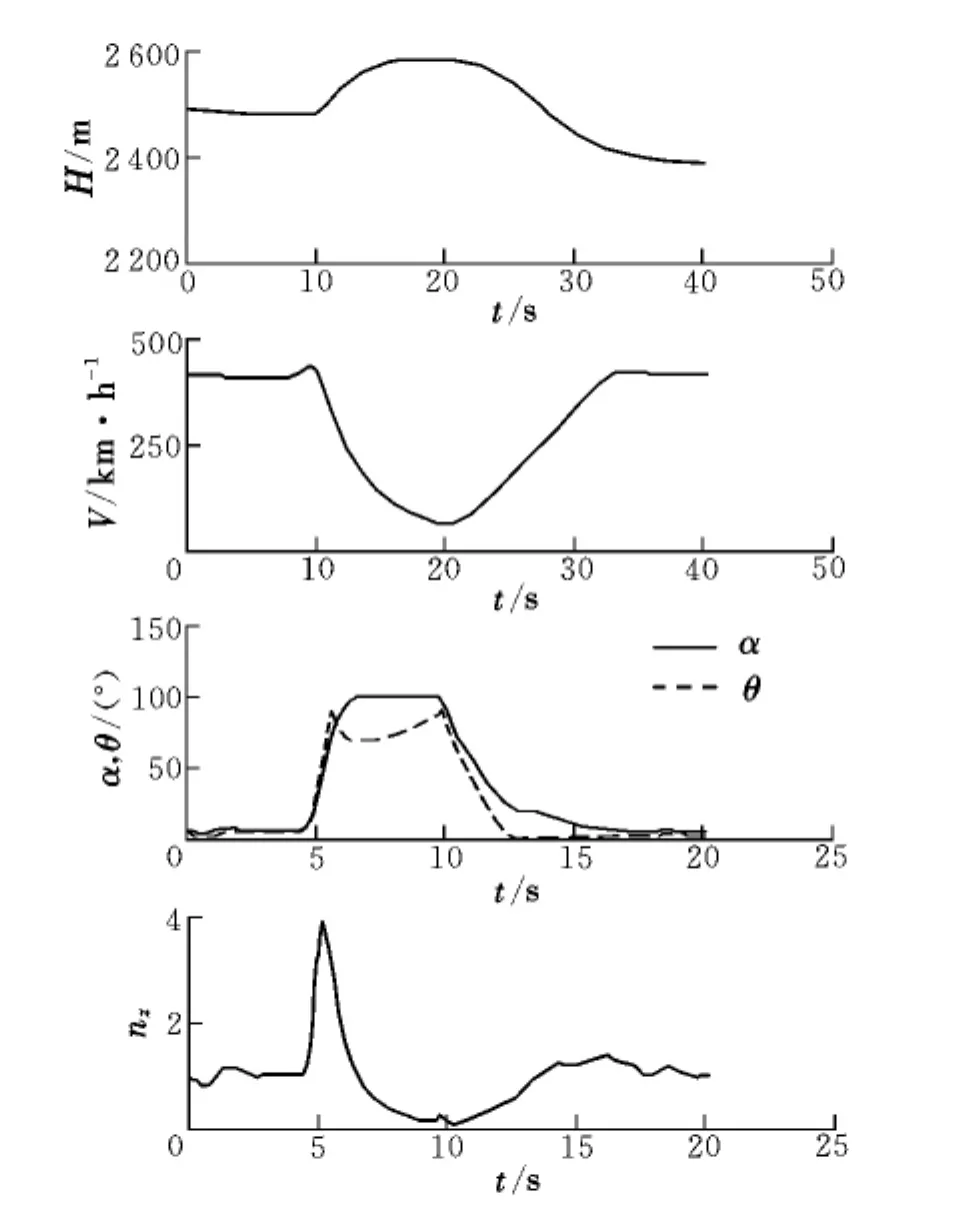
图4 “眼镜蛇”机动模拟试验结果Fig.4 “Cobra”maneuver simulation test results
3.2 “J转弯”机动
“J转弯”机动是指飞机从初始平飞拉起形成大迎角,机头迅速上仰,在接近垂直向上位置时,速度急剧下降(气动舵面的效率也迅速下降),然后压杆,利用推力矢量控制使飞机绕速度矢旋转,从上仰状态转为机头向下,实现飞机航向180°转向。
该试验的进入条件在飞行高度为2~5 km,表速为400~550 km/h的状态下,俯仰操纵指令选择迎角指令类型;配平飞机保持5~10 s;迅速拉杆使飞机上仰接近垂直状态(迎角约为70°);减速至250 km/h左右时,向一侧压杆直至机头向下;观察飞机的航向变化,同时有节奏地缓慢松杆减小迎角;当飞机航向改变超过180°时,反向压杆直至机翼水平;稍松杆减小迎角逐渐改出俯冲。该机动动作成功的判据有两点:一是迎角到达60°或以上;二是飞机航向改变180°。在操作时,试飞员需注意避免加入横向和航向的输入,并打开发动机加力,以保持飞机有足够的动能。
图5为“J转弯”机动的地面模拟试验结果。由试验结果可知,飞机从2.3 km,410 km/h进入机动,完成180°转向的时间约为16 s,整个机动完成的质量较好。该机动可分解为快速俯仰和绕速度轴的滚转两个部分,因此被作为综合验证飞机过失速能力机动的典型动作。按照本文设计的试飞驾驶方法,驾驶员能够完成“J转弯”机动。
驾驶员对整个动作过程的评述是:采用迎角模式可以轻松地进入机动并建立初始迎角;由于大迎角下的滚转响应是绕速度轴旋转、绕体轴滚转和偏航的复合运动,需要一定的适应过程,因此施加压杆操纵时,操纵量不宜过大,避免响应太快超出预期;另外,在截获180°航向过程中松杆不能过快,迎角的快速减小会导致飞机过度低头、高度损失太多;俯仰和航向姿态判读容易。多名驾驶员的“库伯-哈珀”评价等级均值为3。
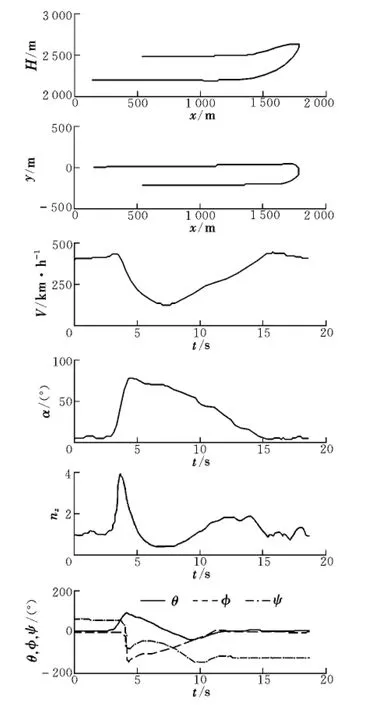
图5 “J转弯”机动模拟试验结果Fig.5 “JTurn”maneuver simulation test results
4 结束语
本文针对我国当前在过失速机动飞行试验方法、程序、化解技术风险措施等方面的不足,通过开展过失速机动飞行控制律设计与建模等,依托现有的大型地面模拟设施,建立了满足过失速机动飞行试验研究要求的地面飞行模拟环境。在此基础上,通过理论分析、仿真计算和模拟验证,提出了多种典型过失速机动的试飞驾驶方法,包括:试验状态、操作程序(含进入条件、驾驶方法、退出方法等)、注意事项、成功判据、试飞员评述要点等,并进行了大量的人在回路的地面模拟飞行验证。验证结果表明,按照本文方法,驾驶员能够顺利完成过失速机动试飞动作并给出有效的评述。
过失速机动试飞是一项复杂的系统工程,涉及的内容很多,本文仅就过失速机动本身的试飞驾驶方法进行了初步探索,而对于整个过失速机动飞行试验来说还有很多问题亟待解决,比如带推力矢量飞机的大迎角飞行品质评价技术;过失速机动试飞的安全评估和风险化解措施,如发动机停车故障下的失速/尾旋改出办法,以及作为风险科目的飞行组织管理和安全监控方法等。另外,过失速机动试飞对试飞员的驾驶和评价技术、生理和心理素质是一种挑战,必须有针对性地开展试飞员培训相关内容的技术研究。
[1] Tamrat BF.The X-31:a post-stall technology(PST)fighter close-in-combat results assessment,and a look at new cic performance evaluation metrics[R].AIAA-2004-5173,2004.
[2] Adams R J,Buffington J M,Banda SS.Design of nonlinear control laws for high angle-of-attack flight[J].Journal of Guidance,Control,and Dynamics,1994,17(4):737-746.
[3] Clark C,Bernens M.High angle-of-attack flight characteristics of the YF-22[R].AIAA-1991-3194,1991.
[4] Harris J J,Black G T.F-22 control law development and flying qualities[R].AIAA-1996-3379,1996.
[5] Merrill W,Garg S.Integrated flight and propulsion controls for advanced aircraft configuration[R].N96-13399,1995.
[6] 范子强.过失速机动飞机的鲁棒非线性控制律设计及仿真[D].北京:北京航空航天大学,1999.
[7] 胡孟权.推力矢量飞机非线性飞行控制律设计研究[D].西安:西北工业大学,2002.
[8] 洪剑锋.推力矢量飞机过失速机动仿真研究及大迎角非线性控制律设计[D].西安:西北工业大学,2003.
