6-THRT并联机构试验平台的受力分析
2015-12-28唐玉龙李开明
唐玉龙,李开明
(南京理工大学 机械工程学院,江苏 南京 210094)
6-THRT并联机构试验平台的受力分析
唐玉龙,李开明
(南京理工大学 机械工程学院,江苏 南京 210094)
摘要:研究对象为一种载荷试验平台,主要采用的是一种对称6-THRT的并联机构。对其进行了位置分析,从而确定支杆位移与平台位姿参数的关系,利用matlab软件对该机构在整个工作空间表面进行静力学逆解仿真分析。任一杆件在工作空间的每个点都对应着一个力的值,给定动平一个载荷,来研究各支链杆的受力变化情况。为该机构的支链驱动设计和电动缸的选择提供了依据。
关键词:并联机构;工作空间;静力学
0引言
并联机构由于刚度好,承载能力大,精度高,惯量小等优点,一直被应用于工业医疗及航天等领域,其中并联式结构更多地被应用到实际生产中。现对一种载荷试验平台的设计进行力学分析。整个载荷平台联通支撑的机架置于一坑内,进行实验时连同机架一同升起,并调整好并联机构动平台的位置。各支链采用滚珠丝杠的设计,并联机构的各个支链安装有一维的拉压力传感器,能够识别杆件的分力。但是各个杆件的受力大小是跟随动平台的位姿变化而改变的,应用MATLAB软件对该机器人在整个工作空间表面进行静力学逆解仿真分析。任一杆件在工作空间的每个点都对应着一个力的值。
1并联机构的结构参数定义以及位置分析
首先对测量平台进行数学建模并进行位置分析,平台的简图如图1。

图1 并联机构俯视图
本机构的上、下两平台均为六边形结构,由三条相等的长边和短边间隔组成,并且任意两长(短)边的中垂线之间的夹角均为120°,短边圆心角取20°。平台间由6根滚珠丝杠铰链连接。分别以定平台的o为点和动平台的p点为原点建立坐标系o-xyz和p-x1y1z,其中o点和p点为动平台和定平台的几何中心,上平台的和下平台的外接圆半径分别为500mm和750mm。 滚珠丝杠lmin=1040mm,lmax=1650mm,驱动轴行程L=610mm;铰链A1,A2,A3,A4,A5,A6代表了定下台平面;铰链B1,B2,B3,B4,B5,B6代表了动平台的平面。为了建立机构的数学模型,还需要建立机构的坐标系,将机构的各个尺寸参数一数学表达式的形式表示出来。
根据平台的几何尺寸关系,得出下平台和上平台的各铰链点在定坐标系的矢量为:
根据上平台相对于下平台的余弦矩阵T和上下平台的各铰链点坐标,T为上平台姿势的方向余弦矩阵,有9个元素,但它们都依赖于动坐标系相对于固定平台的定坐标系的3个独立转角α,β,γ就可以求出定动平台得位置与姿态求各个连杆长度li,即各移动副得位移的关系。即:
(1)
(2)

2机构的静力学分析
首先对并联平台的6根支链做受力分析,取其中的某一支链,如图2所示。

图2 并联机构支链图
当支链静止时,对单个支链杆进行力学分析,连杆主要受上平台铰链点力矢量FBi和与下平台连接的铰链点FAi。根据理论力学知识,下平台铰链点受力FAi和上平台受力FBi和连杆的重力在同一平面。G为裸杆收到的重力,当在下平台铰链点Ai点附近加上一个一维的拉压力传感器Si,此传感器只能测出沿着支链杆的轴向分力。此时给出传感器测得的压力值为Pi,在传感器上端的丝杆受到的重力为Gu,受力图如图3所示。
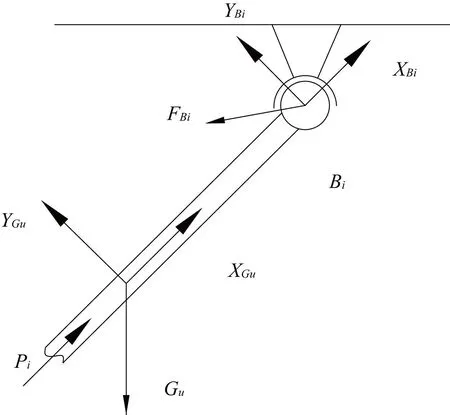
图3 支链传感器上半部图
假设下平台某一铰链点Ai在基准坐标系中的坐标为(xA,yA,zA),上平台某一铰链点Bi在基准坐标系中的坐标为(xB,yB,zB)。其中,设dx0=xB-xA,dy0=yB-yA,dz0=zB-zA,结合没装传感器的支链图,于是有:


(3)
将上式带入整理并忽略了杆子的自重而写成矩阵的形式为:
(4)
其中,K4为动平台受到的重力,综合以上个公式可知,K1、K1’中的各个参数分别为:

其中:(xyzαβγ)工作空间点在极坐标的参数。
工作空间表面上的静力仿真:

只受重力时,即[FM]=[0 0 0 0 0 0]
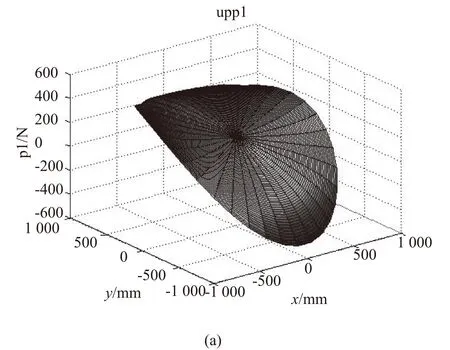

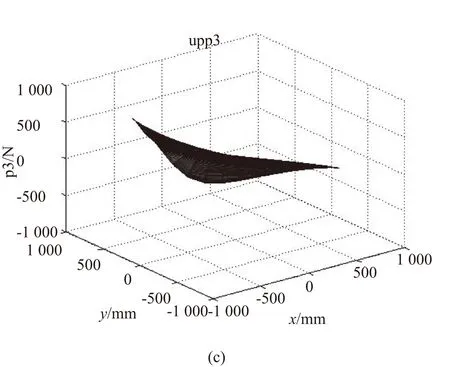
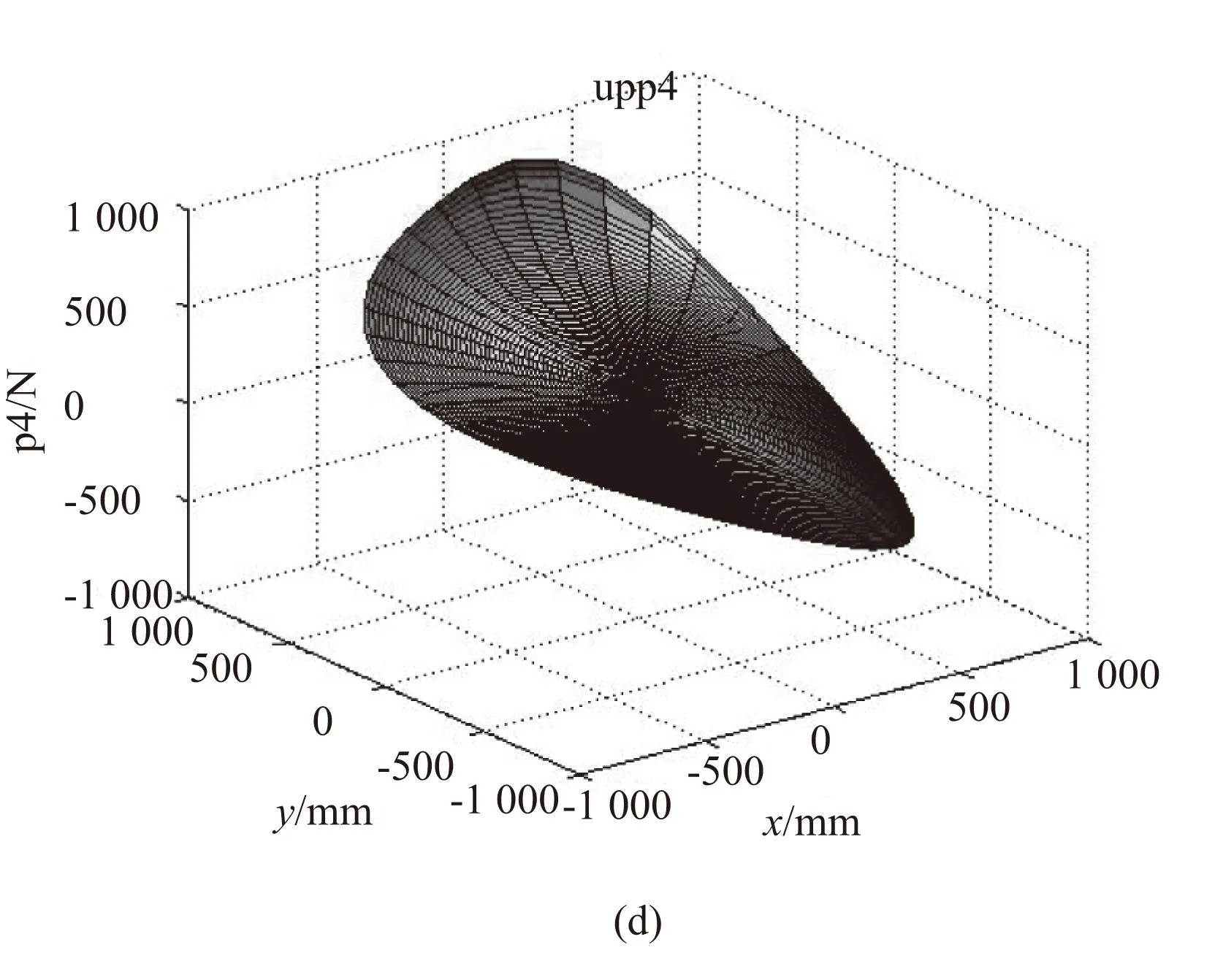
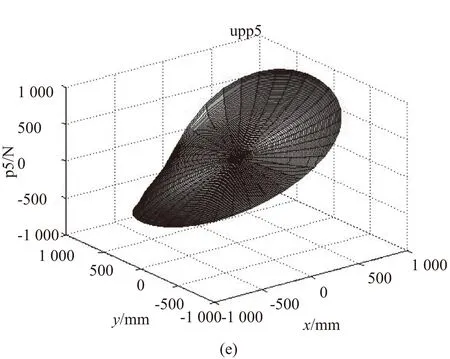
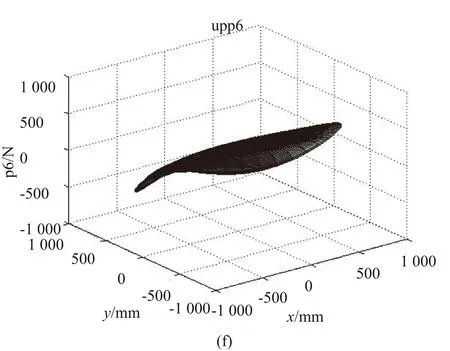
图4 6杆受力情况
当上平台受到载荷为[FM]=[1000 1000 1000 0 0 0]时受力情况如图5所示。
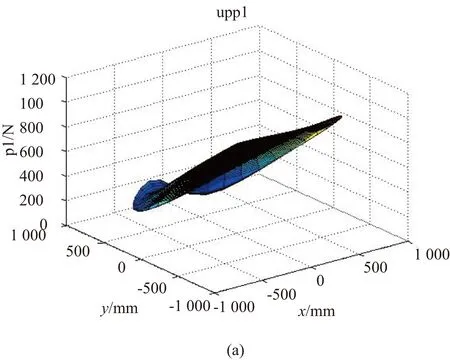
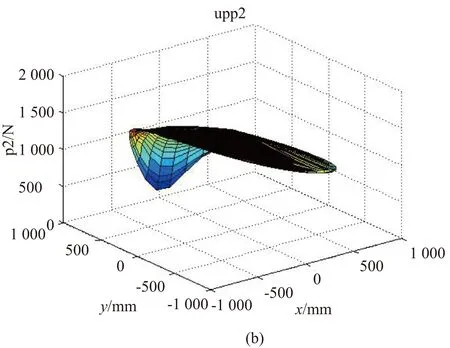
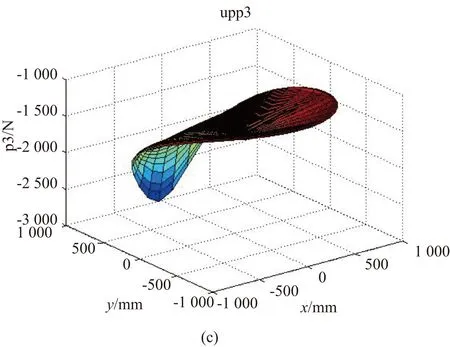
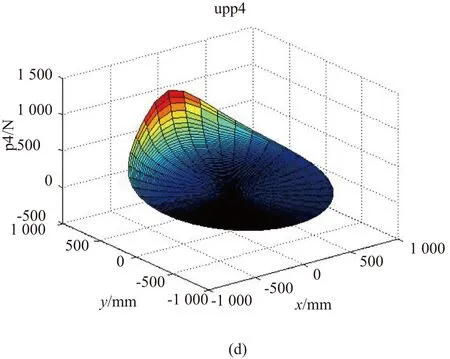

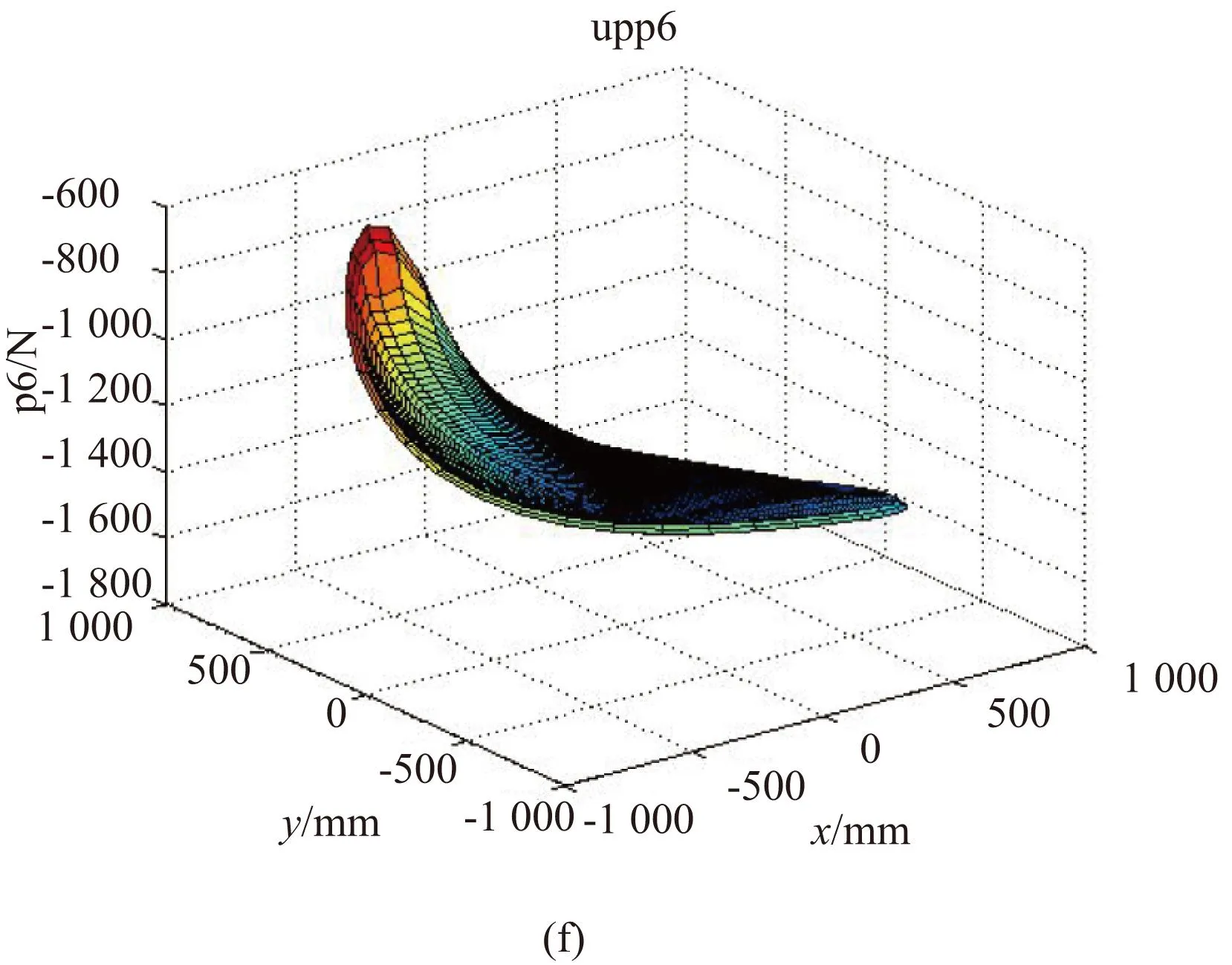
图5 受力情况
根据以上2组仿真图对比可知,动平台受到外载荷时杆子的受力范围都变大了,并且受力的对称性遭到了破坏。当坐标系的x轴或y轴与其中一条线重合时,各杆件受力就表现出对称性。由仿真数据可以看出,第1、2、5根杆子的受力都是正值,而第3、6根杆子受力都是负值。这就说明了在这样的外载荷作用下,对应于工作空间上表面的点,第1、2、5根杆子都是受压力,第3、6根都是受拉力。
3结语
由以上分析得出,上平台在外载荷力作用下,支链杆在工作空间边缘受力最大,而在工作空间中心位置受到的
力比较平均。这就说明,在实际工作中应该尽可能让并联机器人在工作空间的中心位置活动。这时各杆受力均匀,机器人的工作稳定性能好,且对杆子的损害小,也可以提高机器人的使用寿命,对试验时力的加载方式也有一定的参考作用。
参考文献:
[1] 高继良,李开明,陈有清. 3-(2SPS)并联机构的工作空间分析及结构参数对其影响分析[J]. 机床与液压,2011,39(23):51-54.
[2] 黄真,孔令富,方跃法. 并联机器人机构学理论及控制[M]. 北京:机械工业出版社,1997.
[3] 张绪华. 6-THRT并联机器人运动学性能研究[D]. 南京:南京理工大学,2004.
[4] 金振林,赵现朝,范文刚. 新型正交并联机器人静力学分析[J]. 燕山大学学报,2002,26(4):308-311.
[5] 陈文凯,刘平安. 3-RSR并联机器人静力学和刚度的研究[J]. 机械设计与制造,2006(9),113-115.
Stress Analysis of 6-THRT Parallel Mechanism Test Platform
TANG Yu-long, LI Kai-ming
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract:This paper takes the load test platform. with a symmetrical 6-THRT parallel manipulator as object of study and analyzes the relationship between the determined parallel manipulator posture and the strut displacement. It also uses the matlab software to analyzes the simulation of its entire workspace surface statics inverse and any rodvalus corresponding to the force on working space and gives a load to the parallel manipulator to study the stress changes of every branch. The result can be contributed to the development and application of the design of the driven branch and the selection of the electric cylinder.
Keywords:parallel manipulator; workspace; statics
基金项目:国家自然科学基金资助项目(51305196) 国家科技重大专项(2012ZX04002021)
收稿日期:2014-12-05
中图分类号:TH122; TP391.9
文献标志码:B
文章编号:1671-5276(2015)03-0017-04
作者简介:唐玉龙(1988-),男,黑龙江齐齐哈尔人,硕士研究生,主要研究方向为并联机构与并联机器人的结构设计与分析。