基于OOSM-PF的微弱目标检测前跟踪*
2015-12-26谭顺成王国宏于洪波关成斌
谭顺成,王国宏,于洪波,关成斌
(海军航空工程学院信息融合技术研究所, 山东烟台 264001)
基于OOSM-PF的微弱目标检测前跟踪*
谭顺成,王国宏,于洪波,关成斌
(海军航空工程学院信息融合技术研究所, 山东烟台264001)
摘要:由于量测数据预处理以及通信延迟等因素的影响,集中式融合跟踪系统面临着无序量测的问题。针对低信噪比和无序量测情况下的微弱目标检测与跟踪,提出了一种基于无序量测和粒子滤波的检测前跟踪方法,然后将该方法的性能与顺序量测滤波方法以及丢弃无序量测方法的性能进行分析对比。仿真结果表明,该算法可以有效处理无序量测问题,实现对微弱目标的有效检测和跟踪,其目标跟踪精度接近顺序量测滤波的跟踪精度。
关键词:无序量测(OOSM);粒子滤波(PF);检测前跟踪(TBD);微弱目标跟踪
0引言
目前的OOSM滤波方法主要包括4种:丢弃OOSM法、重滤波法、数据缓存法以及直接更新法等[1]。其中直接更新法利用OOSM更新当前时刻的状态估计,具有存储量小,计算量小,跟踪精度接近有序量测滤波等特点,是目前国内外学者研究的重点[2-10]。但是,以上方法都是针对目标信噪比较高的情况,没有涉及目标的检测问题,难以实现对低信噪比下的微弱目标进行有效跟踪。据作者所知,目前尚未有关于低信噪比下的OOSM滤波方法的报道。
检测前跟踪算法[11-14]是一种复杂环境下对微弱目标进行探测的有效方法,而基于粒子滤波的TBD算法因对非线性非高斯系统具有较好的适应性,是目前研究的热点[12-14]。文中充分利用TBD算法在检测和跟踪微弱目标方面的突出优点,提出了一种低信噪比情况下基于OOSM-PF的TBD方法,同时实现OOSM情况下对微弱目标的有效检测和跟踪。仿真结果表明了该算法的有效性和优越性。
1基于OOSM-PF的TBD方法
1.1 系统模型
(2)wk为过程噪声,其协方差为Qk,k-1。
(3)定义目标初始存在概率η1=P{E1=1}。

(4)其中:
(5)

(7)

(9)式中:Ci(xk)和Cj(xk)表示所有受目标影响的分辨单元坐标(i,j)的集合。
1.2 OOSM下的粒子权重更新
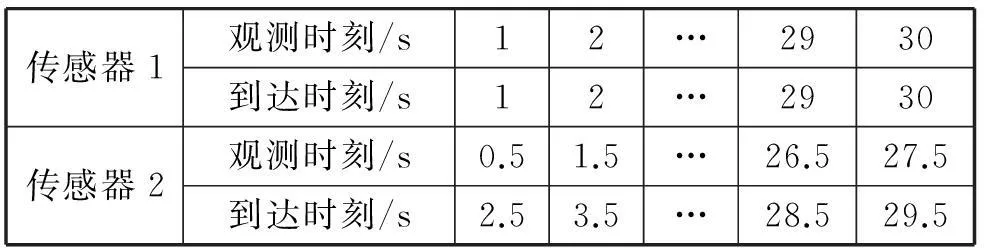
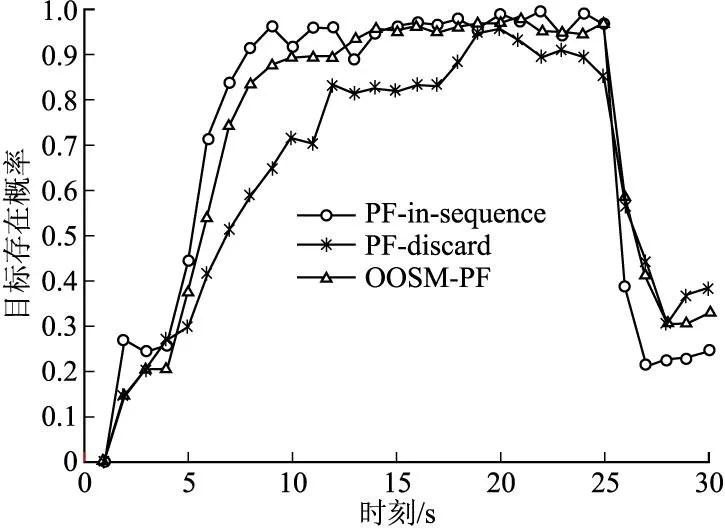
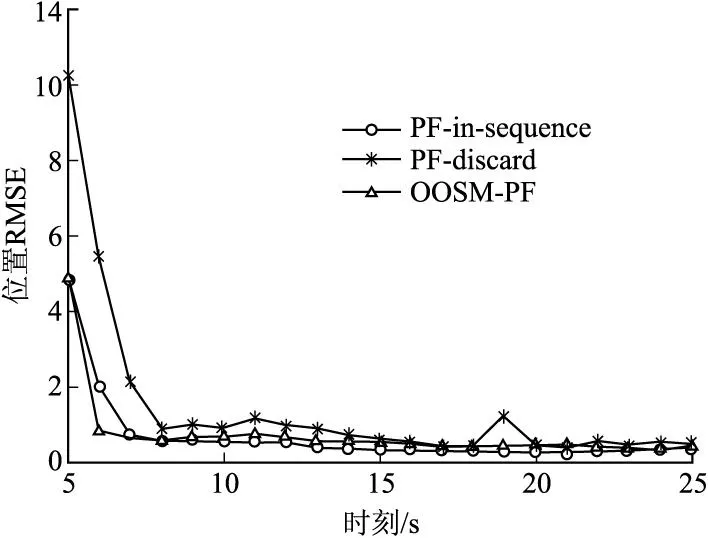
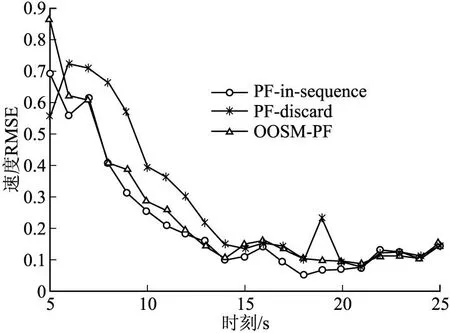
假设k时刻的量测zk被确定为无序量测,即其被观测到的时刻满足tk p(x0:k|z1:k)=p(x0:k-1|z1:k-1)× p(zk|xk)p(xk|xb,xa)p(x0:k-1|z1:k-1) (10) (14) (15) (16) 步骤1:k=0,根据初始分布得到初始化粒子集S0,令Ω0={S0}; 步骤2:令k=k+1,判断zk是否为无序量测,这里分两种情况进行处理: 情况1:zk不是OOSM 3)粒子权重更新,引入像素似然比[11]: (17) (18) (19)4)粒子重采样[11] (20) 得到Sk,文中采用系统重采样法进行粒子重采样。 (22) 6)利用Sk对Ωk-1进行更新,得到Ωk,转步骤2。 情况2:zk为OOSM 1)根据OOSM的被观测时刻tk确定OOSM的前一时刻b以及后一时刻a; 2)粒子状态预测及粒子权重更新,对任意r∈{1,2,…,N}同样分两种情况进行讨论: 3)粒子权重更新,同情况1的3); 4)粒子重采样 (23) 值得注意的是,此处仅利用OOSM更新k-1时刻的粒子权重,然后在此基础上进行重采样; 2实验仿真 本节设置一个与文献[11]相同的机动弱目标的运动场景进行实验仿真,滤波器的基本参数也同文献[11]。不同之处在于文献[11]采用的单传感器,不存在OOSM问题。 设有两个传感器对目标进行观测,采样间隔均为1 s。表1描述了融合中心收到量测数据的时序情况,每个量测数据标有观测时刻和传感器ID号。 表1 各传感器量测观测时刻和实际到达时刻 从表1可以看出,传感器2的量测较传感器1的量测延迟了2个时刻到达,为多步延迟OOSM的情况。 为了验证算法的性能,将文中构造的算法与顺序量测滤波方法和丢弃OOSM方法进行仿真分析和比较。为方便描述,此处以PF-in-sequence、PF-discard以及OOSM-PF分别表示顺序量测滤波方法、丢弃OOSM方法以及文中算法。图1~图3分别给出了3种算法估计的目标存在概率、估计的目标位置均方根误差(RMSE)以及估计的目标速度RMSE,仿真结果为30次Monte Carlo仿真取平均的结果。由仿真条件可知,第5 s至25 s目标真实存在于监测区域,其他时刻监测区域内不存在目标。 由仿真结果可知,文中构造的OOSM-PF算法与PF-in-sequence算法性能相当。此外,若假定某一时刻估计的目标存在概率大于或等于0.6(如图中虚线所示),则认为当前时刻监测区域内存在目标,PF-in-sequence和OOSM-PF均只延迟1个时刻即检测出目标,当滤波达到稳定后,其估计的目标存在概率较高,接近于1,而PF-discard则延迟了4个时刻才检测出目标,且滤波达到稳定后其估计的目标存在概率较其他两种算法低,如图1所示。从图2和图3可以看出,PF-in-sequence和OOSM-PF比PF-discard具有更快的收敛速度。 图1 估计的目标存在概率 图2 估计的目标位置RMSE 图3 估计的目标速度RMSE 3结论 为解决低信噪比和OOSM情况下的微弱目标跟踪,文中研究了一种基于OOSM-PF的微弱目标TBD方法。仿真结果表明,该算法对微弱目标的检测与跟踪性能接近于顺序量测滤波算法的性能,可以有效实现无序量测情况下对微弱目标的有效检测与跟踪。 参考文献: [1]王炜, 黄心汉, 王敏. 无序量测滤波更新算法综述 [J]. 控制与决策, 2012, 27(1): 1-7. [2]BAR-SHALOM Y, CHEN H M, Mallick M. One-step solution for the multistep out-of-sequence-measurement problem in tracking [J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 27-37. [3]BAR-SHALOM Y, HUIMIN C. IMM estimator with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 90-98. [4]ZHOU W H, LI L, CHEN G H, et al. Optimality analysis of one-step OOSM filtering algorithms in target tracking [J]. Science China Information Sciences, 2007, 50(2): 170-187. [5]ZHANG K S, LI X R, ZHU Y M. Optimal update with out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2005, 53(6): 1992-2004. [6]SHEN X J, ZHU Y M, SONG E B, et al. Optimal centralized update with multiple local out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2009, 57(4): 1551-1562. [7]ORTON M, MARRS A. Particle filters for tracking with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(2): 693-702. [8]CHEN J G, LI J, GAO X B. Single-step-lag OOSM algorithm based on unscented transformation [J]. Science China Information Sciences, 2011, 54(3): 664-673. [9]余安喜, 杨宏文, 胡卫东, 等. 无序量测的次优递推滤波器 [J]. 电子学报, 2004, 32(6): 960-964., 黄心汉, 王敏. 无序量测滤波更新算法综述 [J]. 控制与决策, 2012, 27(1): 1-7. [2]BAR-SHALOM Y, CHEN H M, Mallick M. One-step solution for the multistep out-of-sequence-measurement problem in tracking [J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 27-37. [3]BAR-SHALOM Y, HUIMIN C. IMM estimator with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 90-98. [4]ZHOU W H, LI L, CHEN G H, et al. Optimality analysis of one-step OOSM filtering algorithms in target tracking [J]. Science China Information Sciences, 2007, 50(2): 170-187. [5]ZHANG K S, LI X R, ZHU Y M. Optimal update with out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2005, 53(6): 1992-2004. [6]SHEN X J, ZHU Y M, SONG E B, et al. Optimal centralized update with multiple local out-of-sequence measurements [J]. IEEE Transactions on Signal Processing, 2009, 57(4): 1551-1562. [7]ORTON M, MARRS A. Particle filters for tracking with out-of-sequence measurements [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(2): 693-702. [8]CHEN J G, LI J, GAO X B. Single-step-lag OOSM algorithm based on unscented transformation [J]. Science China Information Sciences, 2011, 54(3): 664-673. [9]余安喜, 杨宏文, 胡卫东, 等. 无序量测的次优递推滤波器 [J]. 电子学报, 2004, 32(6): 960-964. [10]葛泉波, 冯肖亮, 徐廷梁. 不确定无序量测系统的最优网络化状态估计 [J]. 电子学报, 2011, 39(3A): 7-13. [11]RISTIC B, ARULAMPALAM S, GORDON N. Beyond the Kalman filter [M]. Artech House, 2004: 239-251. [12]RUTTEN M G, GORDON N J, MASKELL S. Recursive track-before-detect with target amplitude fluctuations [J]. IEE Proceedings Radar, Sonar and Navigation, 2005, 152(5): 345-352. [13]HLINOMAZ P, HONG L. A multi-rate multiple model track-before-detect particle filter [J]. Mathematical and Computer Modeling, 2009, 49(1/2): 146-162. [14]LONG Y L, XU H, AN W, et al. Track-before-detect for infrared maneuvering dim multi-target via MM-PHD [J]. Chinese Journal of Aeronautics, 2012, 25(2): 252-261. 收稿日期:2014-05-27 基金项目:国家自然科学基金(61179018;61102165;61102167;61002006);航空科学基金(20115584006);“泰山学者”建设工程专项经费资助 作者简介:谭顺成(1985-),男,湖南湘潭人,讲师,博士,研究方向:信息融合、雷达数据处理。 中图分类号:TN953 文献标志码:A OOSM-PF Based Weak Target Track-before-detect TAN Shuncheng,WANG Guohong,YU Hongbo,GUAN Chengbin (Institute of Information Fusion Technology, Naval Aeronautical and Astronautical University, Shandong Yantai, 264001, China) Abstract:entralized fusion tracking system out-of-sequence measurement (OOSM) due to the factors as different pre-processing time and communication delay of measurements. of weak target detection and tracking with low signal-to-noise ratio (SNR) and OOSM, a track-before-detect (TBD) method proposed based on OOSM and particle filter (PF). Furthermore, the performance of the proposed method compared with that of traditional discarding method and in-sequence measurement filtering method. The simulation results demonstrate that the proposed method can solve the problem of OOSM and detect and track weak target efficiently with the performance of target tracking is close to that of the in-sequence measurement filtering. Keywords:out-of-sequence measurement (OOSM); particle filter (PF); track-before-detect (TBD); weak target tracking


1.3 基于OOSM-PF的算法实现