粒子滤波法在移动物体定位中的应用
2017-05-10高嵩
高嵩

摘 要:本文就粒子滤波在移动物体定位应用展开的研究中,论述了PFLT的设计,希望由此能够为相关领域的研究带来一定启示。
关键词:粒子滤波;移动物体定位;应用
中图分类号:TP393 文献标识码:A
所谓PFLT,指的是一种基于粒子滤波的目标定位算法,这一算法本身能够较好应用于人或无人机的定位中,而这种定位的实现也使得PFLT具备着较高的实用价值。不同于传统的MTLL策略,PFLT进行的移动物体定位能够大大提高这一定位的效率,并实现电池消耗的较好降低,这自然使得PFLT能够较好应用于多种领域之中。
1.基于WSN的移动物体定位与跟踪概述
对于基于WSN的移动物体定位与跟踪来说,其本身具备着四方面特性,表1对这一特性进行了较为全面的展示,结合这一展示我们能够更加全面的了解基于WSN的移动物体定位。
图1描绘了移动物体定位和追踪示意图,结合该图我们能够发现,在具体基于WSN的移动物体定位与跟踪中,距离移动物体一定距离的传感器检测节点会在能够进行物体定位与追踪时进入工作状态,其他时间则处于休眠状态,这样就较好满足了移动物体定位和追踪的需求。在这一移动物体定位和追踪中,基于粒子滤波的目标定位算法PFLT能够取得更为优异的使用效果。
1.1系統模型设计
结合上文内容,我们就可以设传感器网络节点集合为
这里的N指的是传感器的网络节点数量,而后我们可以假设传感器节点位于一个二维空间区域R内,这样我们就可以得出
这里的A(R)和λ代表的是R的面积与节点密度。
1.2 PFLT设计
由于PFLT属于一种基于粒子滤波的目标定位算法,所以我们首先需要考虑动态状态空间下的随机滤波问题,结合公式x1+1=F(x1,Nt)与公式y1=G(xt,Vt),我们能够发现,非线性、非高斯的噪声是无线传感器网络的实际情况,所以在给定测量序列y0∶t的情况下估算xt这一移动物体位置的状态,是我们的具体工作目标。而结合公式分母P(yt|y0∶t-1)为测量值向量,我们能够得出基于序列重要性采样的形式构建,即
在本文基于粒子滤波的目标定位算法进行的移动物体定位应用中,笔者采用了保存于跟踪数据缓冲Buf中的数据来有效近似物体追踪的时空数据,而因为这种时空数居的有效,也使得本文进行的研究采用了根据Buf中最近两次物体位置信息和定位时间点进行移动物体定位与跟踪的策略,这一策略的采用使得本文所进行的粒子滤波在移动物体定位中应用展开的研究得以更好实现。结合图2采样空间图我们能够发现,我们能够得出:
这一公式的得出需要以物体在时刻t的位置于图2所示扇形区域均匀分布为前提。
不同于传统的粒子滤波,基于粒子滤波的目标定位算法PFLT采用的是误差容忍方式进行数据的存储和预测,这就使得应用粒子滤波的目标定位算法PFLT能够大大减少网络中通信的相关开销,这对于移动物体定位的更好实现自然会给予较好的支持,而这一功能的实现则源于基于粒子滤波的目标定位算法PFLT能够容忍个位置信息误差,这就使得这一算法的应用能够在客观上降低网络中数据刷新的次数,这点在笔者进行的模拟实验中也得到了较好的验证。
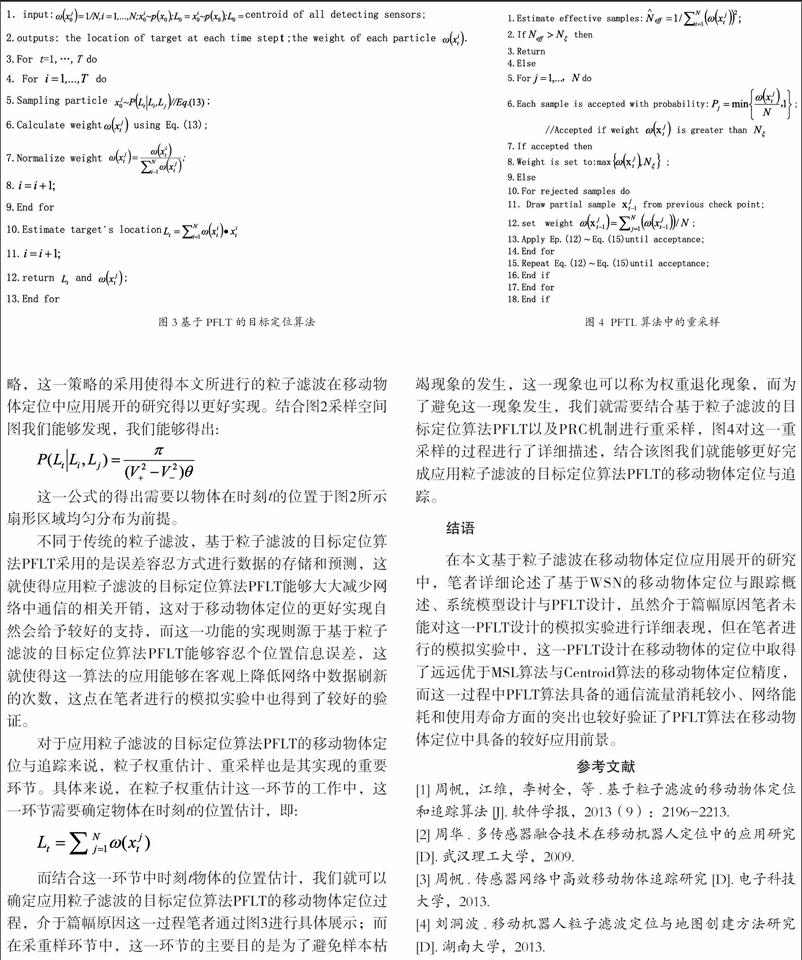
对于应用粒子滤波的目标定位算法PFLT的移动物体定位与追踪来说,粒子权重估计、重采样也是其实现的重要环节。具体来说,在粒子权重估计这一环节的工作中,这一环节需要确定物体在时刻t的位置估计,即:
而结合这一环节中时刻t物体的位置估计,我们就可以确定应用粒子滤波的目标定位算法PFLT的移动物体定位过程,介于篇幅原因这一过程笔者通过图3进行具体展示;而在采重样环节中,这一环节的主要目的是为了避免样本枯竭现象的发生,这一现象也可以称为权重退化现象,而为了避免这一现象发生,我们就需要结合基于粒子滤波的目标定位算法PFLT以及PRC机制进行重采样,图4对这一重采样的过程进行了详细描述,结合该图我们就能够更好完成应用粒子滤波的目标定位算法PFLT的移动物体定位与追踪。
结语
在本文基于粒子滤波在移动物体定位应用展开的研究中,笔者详细论述了基于WSN的移动物体定位与跟踪概述、系统模型设计与PFLT设计,虽然介于篇幅原因笔者未能对这一PFLT设计的模拟实验进行详细表现,但在笔者进行的模拟实验中,这一PFLT设计在移动物体的定位中取得了远远优于MSL算法与Centroid算法的移动物体定位精度,而这一过程中PFLT算法具备的通信流量消耗较小、网络能耗和使用寿命方面的突出也较好验证了PFLT算法在移动物体定位中具备的较好应用前景。
参考文献
[1]周帆,江维,李树全,等.基于粒子滤波的移动物体定位和追踪算法[J].软件学报,2013(9):2196-2213.
[2]周华.多传感器融合技术在移动机器人定位中的应用研究[D].武汉理工大学,2009.
[3]周帆.传感器网络中高效移动物体追踪研究[D].电子科技大学,2013.
[4]刘洞波.移动机器人粒子滤波定位与地图创建方法研究[D].湖南大学,2013.
