面向水体的HY-1B/COCTS图像条带噪声去除
2015-12-25龚绍琦张茜茹王少峰孙德勇鲁奕岑国文哲
龚绍琦,张茜茹,王少峰,孙德勇,鲁奕岑,国文哲
(1.南京信息工程大学气象灾害省部共建教育部重点实验室,南京 210044;2.南京信息工程大学遥感学院,南京 210044;3.中国人民解放军73608部队,南京 210028)
0 引言
“海洋一号”B星(HY-1B)是我国第2颗用于海洋水色遥感的太阳准同步极轨卫星,于2007年4月11日在太原卫星发射中心成功发射,星上有效载荷为10波段的水色水温扫描仪(Chinese ocean color and temperature scanner,COCTS)和4波段的海岸带成像仪CCD。HY-1B COCTS图像在星下点的空间分辨率为1.1 km,每扫描行像元1 664个,量化等级为10 bit,其8个可见光-近红外波段和2个热红外波段能对我国海域的叶绿素、悬浮泥沙、可溶性有机物、海表温度和海冰等要素进行实时观测[1]。COCTS采用多个探测器并列扫描的方式获取数据,但多元并扫的方式使得各个探测器对地物辐射信号的光谱响应不同,导致获得的图像在沿探测器阵列的方向产生条带,特别是对地表均匀目标(如水体)探测时,条带现象尤为严重[2]。条带噪声掩盖了图像的真实辐射信息、降低了数据质量,给海洋水色要素的定量反演带来误差。因此在对COCTS图像进行定量化分析应用之前,必须消除这种条带噪声的影响。
目前,遥感图像条带噪声去除的方法有2大类:①基于频率域的滤波方法,如快速傅立叶变换法[3-4]和小波变换法[5-6]等,但此类方法很难选择正确的频率成分,会将图像中非条带信息去除,降低图像质量,使图像的灰度值变化较大;②基于图像灰度特征的统计方法,如直方图匹配法[7]、矩匹配法[8]、均衡化曲线法[9-10]及插值法[11-12]等,其中,直方图和矩匹配法都要求图像足够大且地物分布均匀。有关研究表明,矩匹配法可以获得比直方图匹配更好的效果,因此许多学者对矩匹配法提出了改进:刘正军等[13]提出了均值补偿的矩匹配法;陈劲松等[14]选择了一个与条带噪声图像相关性很高的波段作为参考图像进行矩匹配消除;张炳先等[15]提出了灰度分割的自适应矩匹配法来去除图像的条带噪声;秦雁等[16]则提出了分段线性动态矩匹配法来去除图像的条带噪声。矩匹配法在遥感图像条带噪声去除方面有很大的应用潜力。由于HY-1B/COCTS主要用于水体监测,本文将针对水体区域(即在提取水体信息的基础上),采用矩匹配法对COCTS图像进行条带噪声去除,并选用多个评价指标对噪声去除前、后的效果进行定量评价,为HY-1B/COCTS的水体遥感定量监测的前期图像处理提供技术支持。
1 数据源与方法
1.1 数据源
本文以2009年4月21日获取的覆盖渤海、黄海、东海和部分日本海的COCTS Level 1A级图像为数据源。卫星过境时天气晴朗,数据质量总体良好,仅因图像刈幅较宽,故少数区域有云覆盖。该数据由国家海洋卫星应用中心提供,图像名为H1BCLR090421025710579.L1A.HDF,共有 10 个波段,其中,B1—B8为可见光-近红外波段;B9,B10为热红外波段(表1)。
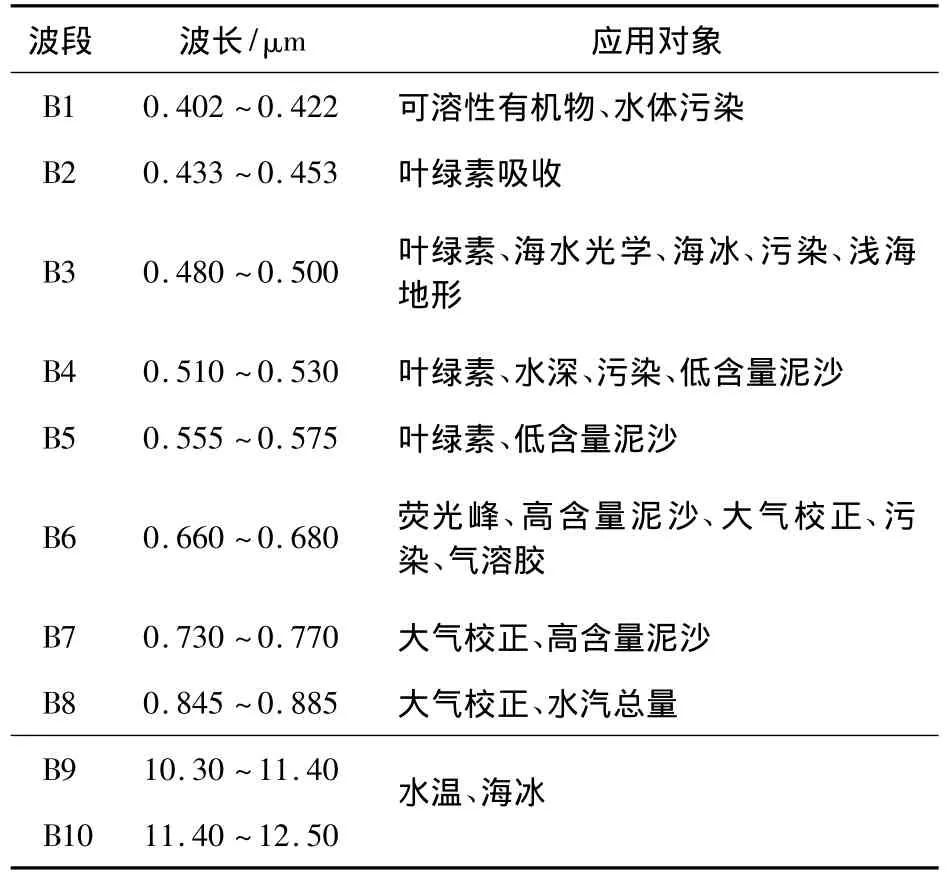
表1 HY-1B/COCTS波段设置及用途Tab.1 Band set and use of HY-1B/COCTS
本文将从原始图像中裁取包含水体的824列×1 009行的矩形区域进行处理分析。
1.2 去噪方法——矩匹配法
由于HY-1B/COCTS是采用4元双面并扫成像的,在理想情况下,4个探测器对地面光谱响应是一线性函数,即探测器的输出值Y与接收地表反射的辐射量X之间的关系可表示为:Y=aX+b(其中a和b分别为每个探测器的增益和偏移量)。实际上,由于COCTS不同探测器的增益和偏移量存在差异,导致对同一入射的辐射量X产生了不同的输出值Y,在图像上表现为周期性的条带噪声。去除条带噪声的目的就是将各探测器的增益和偏移量归一化到同一水平,使整景图像的数据看起来像是同一个探测器获得的。
假设地表均一,相邻扫描行入射的辐射量具有相同的概率分布(即均值μ和标准差σ近似相等),矩匹配法将根据一定的准则确定出参考探测器r,建立各探测器i的均值和标准差与参考探测器的均值和标准差之间的关系,计算出各探测器归一化的增益a'和偏移量b'。由此可得到去除条带噪声后图像灰度值的计算公式,即

式中:Xij和Yij分别为第i个探测器、第j个像元的条带去除前后的输出值;μr和σr分别为参考探测器r扫描行的均值和标准差;μi和σi分别为探测器i扫描行的均值和标准差。这里,参考探测器的均值μr和标准差σr分别取所有探测器扫描行均值和标准差的中值。
当图像较小且地物较复杂、不同地物的光谱差异大灰度分布不均匀时,面向所有地物的矩匹配法通常会使图像产生“带状效应”(banding effect),即沿列方向(假设探测器沿行方向扫描)图像在整体上表现出一种时暗时亮的不连续现象[13]。造成这种现象的原因是图像中的地物种类多且分布无规律,致使传感器每个探测器扫描行的输出值间变幅很大,由此得到的均值和标准差也就不同;而矩匹配法把原本非一致的各行均值和标准差都调整到某个参考行的均值和标准差上,从而导致图像上的输出值发生畸变。因此,本文针对HY-1B/COCTS的水体遥感监测,对图像的水体区域进行条带噪声去除,有效地避免了矩匹配法造成的“带状效应”。
1.3 水体信息提取方法
目前,遥感图像水体信息提取方法主要有单波段阈值法[17]、多波段谱间关系法[17]、水体指数法[18-20]和计算机自动分类法[21-22]等。其中,水体指数法充分利用了图像波段之间的地物光谱差异,能有效地把水体与其他地物区别开来。因此,利用COCTS图像的绿波段(BGreen)和近红外波段(BNIR)的灰度值,构建归一化差分水体指数NDWI=(BGreen-BNIR)/(BGreen+BNIR)。当NDWI>0时,即为水体区域。
2 结果与分析
2.1 基于NDWI的水体信息提取
图1是从HY-1B/COCTS图像中获得的可见光-近红外波段地物光谱特征曲线。
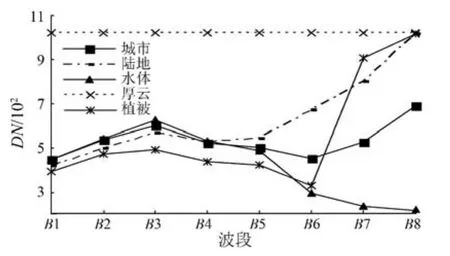
图1 HY-1B/COCTS可见光-近红外波段地物光谱特征Fig.1 Spectrum of ground objects in visible and near infrared bands of HY-1B/COCTS
从图1可以看出,厚云的光谱为一条直线,这是因为COCTS为水色遥感器,水的信息一般比较微弱,传感器在设计时就要求有很高的信噪比和辐射量化级;而云的反射率很高,云的信号使COCTS光谱过饱和,因此厚云的NDWI=0。在可见光波段,植被因为叶绿素的吸收,其光谱值比其他地物都要低,而水体、城市和陆地的光谱值比较接近;但从红光波段开始,水体与城市、陆地和植被的光谱值有了明显的差异。由于COCTS的B4和B5波段为绿波段、B7和 B8波段为近红外波段,因此参考文献[18]的方法,利用上述4个波段构建出NDWI的4种组合,即 NDWI47,NDWI57,NDWI48和 NDWI58。对上述4种组合图像的目视比较发现,在正常情况下,4种NDWI都能很好地识别水体;但当图像有薄云时,NDWI47和NDWI57(尤其是NDWI47)容易将陆地划分成水体;而NDWI58则容易将水体识别成非水体地物。只有NDWI48能将水体从云、陆地、城市和植被中识别出来。图2(a)为利用NDWI48提取的水体信息。可以看出,渤海和黄海的北部、以及东海东部因为云的存在,水体信息没有被完全提取出来,其他面积稍大的水体都被准确地提取(如胶州湾、峡山水库、长江口、杭州湾以及陆域的主要湖泊均清晰可见),表明HY-1B/COCTS构建的NDWI在提取水体信息方面的合理性和准确性。
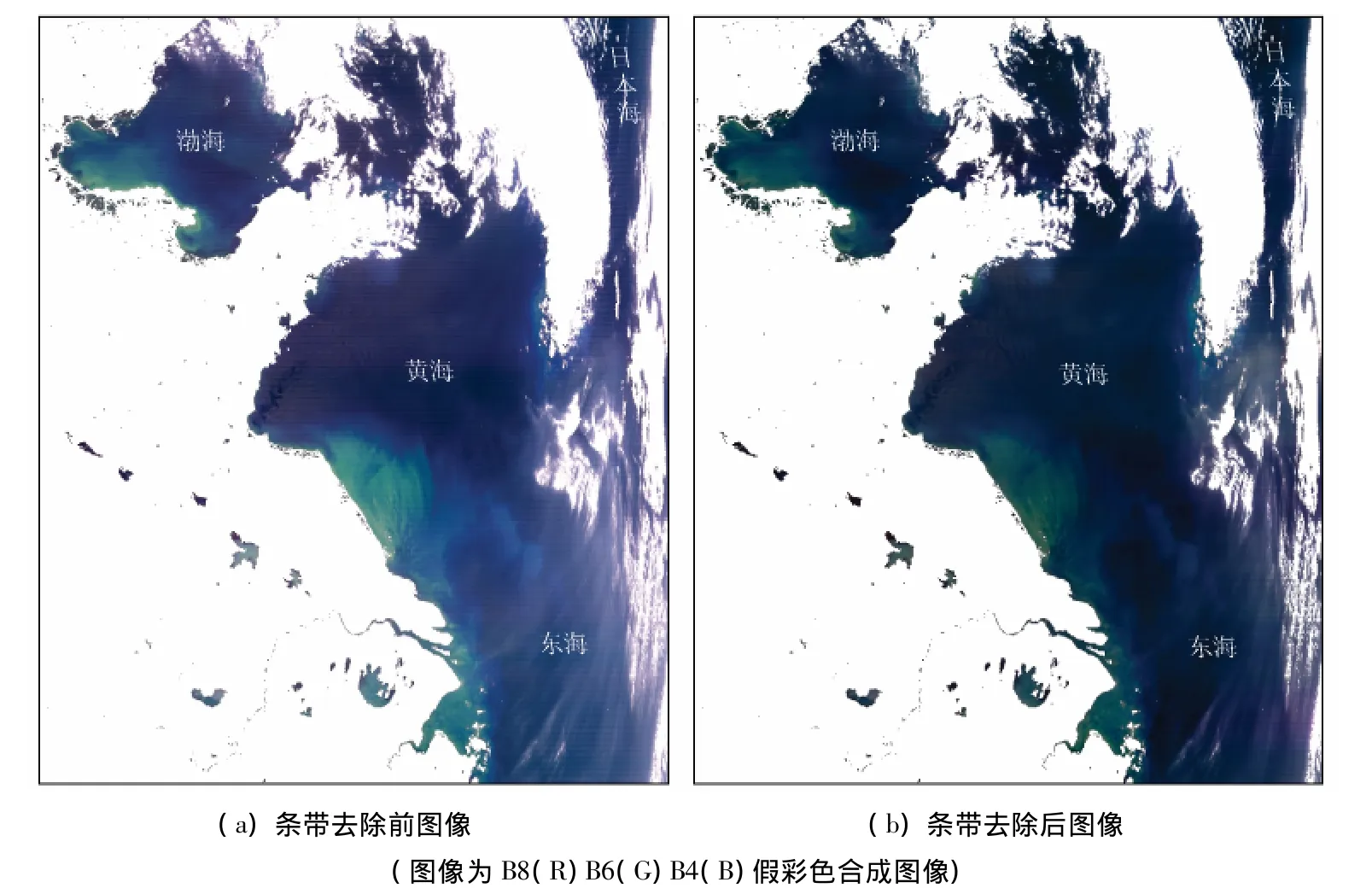
图2 HY-1B/COCTS图像水域部分条带噪声去除前后效果比较Fig.2 Comparison between pre-and post-removal of water stripe noise in HY-1B/COCTS image
2.2 COCTS图像的条带噪声去除
图2为HY-1B/COCTS图像水域部分条带噪声去除前、后的效果对比图,图像大小为824像元×1 009像元。可以看出,条带噪声在行间具有明暗交替现象(因图2(a)为缩小了的图像,故难以看清整景图像都存在条带的原始效果),在整景图像上呈周期性规律。事实上,同一水体卫星传感器接收水面反射的辐射值理应变化不大,但由于COCTS不同探测器对地物光谱响应的差异,其图像每个扫描行的灰度值存在一定的差异。利用矩匹配法对图像的水体区域进行条带噪声去除后(图2(b)),水体不同区域的灰度反差减小,色调趋向均匀,而图像的细节与纹理信息基本不变,总体视觉效果得到增强,说明本文利用矩匹配法对HY-1B/COCTS图像进行的条带噪声去除是有效的,能有效避免“带状效应”,同时也能降低不同探测器辐射值的畸变程度,使去除条带后的图像与真实图像更接近。
2.3 条带噪声去除后的图像质量评价
条带噪声去除后的图像质量评价可从2个方面入手:①根据视觉效果判断(即定性分析)。利用矩匹配法对图像水域部分进行条带噪声去除后,水体不同区域的灰度反差减小,色调趋向均匀,视觉效果得到增强(图2(b))。②根据图像灰度值变化评判(即定量统计分析)。本文通过图像的均值、标准差、信噪比、偏度、峰度、信息熵和平均梯度等 7个指标进行图像质量评价(表2)。
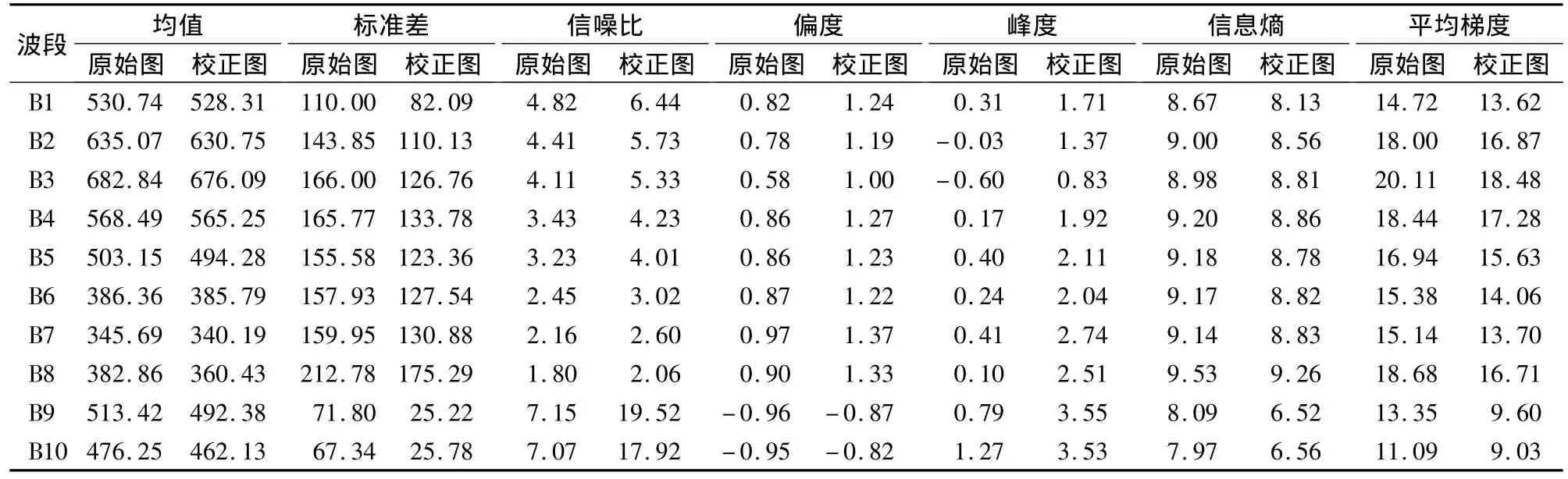
表2 HY-1B/COCTS图像去条带噪声前、后质量评价指标Tab.2 Evaluation indexes for pre-and post-removal of stripe noise in HY-1B/COCTS image
从表1可以看出,在COCTS图像去除条带噪声后,10个波段图像的均值略有减小,但都和原始图像的均值接近,基本保留了原图像的信息。图像的标准差明显减小,信噪比得到提高,尤其是B9和B10这2个热红外波段的数据更为明显。在可见光-近红外波段COCTS图像的偏度都大于0,表明图像灰度直方图的右侧有很长的拖尾,图像很多像元的灰度值大于平均值,条带噪声去除后图像偏度都有所增加,说明大于均值的像元数增加,即原图像中暗的条带变亮;而在热红外波段图像偏度都小于0,表明图像灰度直方图的左侧有拖尾,很多像元的灰度值小于平均值,条带噪声去除后图像的偏度有所增大,灰度值小于平均值的像元减少,原图像中暗的条带变亮。图像的峰度在条带噪声去除后有很大的增加,这是因为原始图像由于明暗条带的存在,像元灰度值离均值较远,图像直方图形状较平坦;条带噪声去除后图像中亮的像元得到抑制,暗像元变亮,都分布在均值附近,图像直方图形状变陡,特别是热红外波段图像直方图更接近正态分布。对于具有明暗条带的原始水域图像,信息熵和平均梯度都比较高,去除条带噪声后图像信息变得单一、灰度值趋向一致、层次减少,即熵值和平均梯度减小。以上7个质量评价指标表明,利用矩匹配法对COCTS图像水域部分去除条带噪声具有良好的效果,图像质量有明显的改善。
3 结论与建议
3.1 结论
1)对HY-1B/COCTS可见光-近红外波段地物光谱曲线的分析结果表明,由COCTS的B4和B8波段构建的归一化差分水体指数(NDWI48)能有效地将水体与其他地物区别开来,并准确地提取出水体信息。
2)在提取水体信息的基础上,利用矩匹配法能有效地去除COCTS图像的条带噪声,使水体图像的色调趋于均匀,而图像的细节与纹理信息基本不变,总体视觉效果得到增强。本文采用的面向水体的矩匹配条带噪声去除方法能有效地避免“带状效应”,同时能降低不同探测器辐射值的畸变程度,使条带噪声去除后的图像与真实图像更为接近。
3)利用图像的均值、标准差、信噪比、偏度、峰度、信息熵和平均梯度7个指标对条带噪声去除后的图像进行质量评价的结果表明,图像均值略有降低,标准差减小,信噪比、偏度和峰度都有所增加,而信息熵和平均梯度降低。这些指标很好地说明条带噪声去除后图像中的水体信息变得单一,灰度、对比度和层次减少,图像质量得到改善。
3.2 建议
1)针对HY-1B/COCTS在水色遥感中的应用特点,本文利用矩匹配法开展了面向水体的图像条带噪声去除研究。而以往的研究都是面向所有地物的,由于不同地物的光谱差异大,用矩匹配法去除图像条带噪声会产生“带状效应”。本文方法在有效去除COCTS图像条带噪声的同时,也克服了“带状效应”问题,值得推广应用。
2)由于目前图像条带噪声去除方法很多,各种方法的优缺点不同,适用范围各异。本文没有尝试其他方法对去除COCTS图像条带噪声的效果,希望能在以后的工作的进一步完善,探索更适用于HY-1B/COCTS水色定量遥感业务化需求的方法。
[1] 国家卫星海洋应用中心.HY-1B卫星介绍[EB/OL].[2007-04-11].http://www.nsoas.gov.cn/wx/channel/default2.asp.National Satellite Ocean Application Service.Introduction of HY-1B satellite[EB/OL].[2007-04-11].http://www.nsoas.gov.cn/wx/channel/default2.asp.
[2] 牛生丽,唐军武,蒋兴伟,等.HY-1A卫星COCTS数据条带消除的两种定量化方法比较[J].遥感学报,2007,11(6):860-867.Niu SL,Tang JW,Jiang XW,etal.The comparison of two quantitative striping removal algorithms for HY-1A COCTS data[J].Journal of Remote Sensing,2007,11(6):860-867.
[3] 陈劲松,邵 芸,朱博勤.中分辨率遥感图像条带噪声的去除[J].遥感学报,2004,8(3):227-233.Chen JS,Shao Y,Zhu B Q.Destriping CMODIS based on FIR method[J].Journal of Remote Sensing,2004,8(3):227-233.
[4] 杨 雪,马 骏,赖积保,等.基于傅里叶变换的HY-1B卫星影像条带噪声去除[J].航天返回与遥感,2012,33(1):53-59.Yang X,Ma J,Lai JB,etal.Destripingmethods for HY-1B satellite images based on fourier transform[J].Spacecraft Recovery &Remote Sensing,2012,33(1):53-59.
[5] 侯 波,迟耀斌,朱重光,等.一种基于小波变换去除遥感图像噪声的方法[J].遥感学报,2003,7(5):379-385.Hou B,Chi Y B,Zhu C G,et al.Remote sensing image denoising in the wavelet domain[J].Journal of Remote Sensing,2003,7(5):379-385.
[6] 陈劲松,朱博勤,邵 芸.基于小波变换的多波段遥感图像条带噪声的去除[J].遥感信息,2003(2):6-9.Chen J S,Zhu B Q,Shao Y.Destriping multi-sensor imagery based on wavelet transform[J].Remote Sensing Information,2003(2):6-9.
[7] Wegener M.Destripingmultiple sensor imagery by improved histogram matching[J].International Journal of Remote Sensing,1990,11(5):859-875.
[8] Gadallah F L,Csillag F,Smith E JM.Destriping multisensor imagery with momentmatching[J].International Journal of Remote Sensing,2000,21(12):2505-2511.
[9] Corsini G,Diani M,Walzel T.Striping removal in MOS-B data[J].IEEE Transactionson Geoscience and Remote Sensing,2000,38(3):1439-1446.
[10] 孙 凌,唐军武,张 杰.我国“海洋1号”卫星(HY-1)CCD图像数据定量化条带消除研究[J].海洋学报,2002,24(6):20-33.Sun L,Tang JW,Zhang J.A study of quantitative striping removal algorithm for HY-1 CCD data[J].Acta Oceanologica Sinica,2002,24(6):20-33.
[11] 吴 军,张万昌.MODIS影像条带噪声去除的自相关插值法[J].遥感技术与应用,2006,21(3):253-258.Wu J,ZhangW C.Destriping MODIS imageswith self-correlation interpolation algorithm[J].Remote Sensing Technology and Application,2006,21(3):253-258.
[12] 杨金红,顾松山,程明虎.插值法在去除MODIS遥感影像条带噪声中的应用[J].气象科学,2007,27(6):604-609.Yang JH,Gu SS,Cheng M H.Application of interpolationmethod in destriping MODIS images[J].Scientia Meteorologica Sinica,2007,27(6):604-609.
[13] 刘正军,王长耀,王 成.成像光谱仪图像条带噪声去除的改进矩匹配方法[J].遥感学报,2002,6(4):279-284.Liu Z J,Wang C Y,Wang C.Destriping imaging spectrometer data by an improved momentmatching method[J].Journal of Remote Sensing,2002,6(4):279-284.
[14] 陈劲松,邵 芸,朱博勤.一种改进的矩匹配方法在CMODIS数据条带去除中的应用[J].遥感技术与应用,2003,18(5):313-316.Chen JS,Shao Y,Zhu B Q.Destriping in CMODIS data by a improvedmomentmatching[J].Remote Sensing Technology and Application,2003,18(5):313-316.
[15] 张炳先,王 密,潘 俊.采用灰度分割的自适应矩匹配条带噪声去除方法[J].武汉大学学报:信息科学版,2012,37(12):1464-1667.Zhang B X,Wang M,Pan J.Destriping panchromatic imagery using self-adaptivemomentmatch[J].Geomatics and Information Science ofWuhan University,2012,37(12):1464-1667.
[16] 秦 雁,邓孺孺,何颖清,等.分段线性动态矩匹配条带去除[J].中国图象图形学报,2012,17(11):1444-1452.Qin Y,Deng R R,He Y Q,et al.Piece-wise linear dynamic momentmatching destriping[J].Journal of Image and Graphics,2012,17(11):1444-1452.
[17] 周成虎,杨晓梅,骆剑承,等.遥感影像地学理解与分折[M].北京:科学出版社,2001:68-90.Zhou C H,Yang X M,Luo JC,et al.Interpretation and Analysis for Remote Sensing Images[M].Beijing:Science Press,2001:68-90.
[18] McFeeters S K.The use of the normalized difference water index(NDWI)in the delineation of open water features[J].International Journal of Remote Sensing,1996,17(7):1425-1432.
[19] 徐涵秋.利用改进的归一化差异水体指数(MNDWI)提取水体信息的研究[J].遥感学报,2005,9(5):589-595.Xu H Q.A study on information extraction of water body with the modified normalized difference water index(MNDWI)[J].Journal of Remote Sensing,2005,9(5):589-595.
[20] 廖程浩,刘雪华.MODIS数据水体识别指数的识别效果比较分析[J].国土资源遥感,2008,20(4):22-26.doi:10.6046/gtzyyg.2008.04.06.Liao C H,Liu X H.An effectiveness comparison between water body indices based on MODIS data[J].Remote Sensing for Land and Resources,2008,20(4):22-26.doi:10.6046/gtzyyg.2008.04.06.
[21] 都金康,黄永胜,冯学智.SPOT卫星影像的水体提取方法及分类研究[J].遥感学报,2001,5(3):214-219.Du JK,Huang Y S,Feng X Z.Study on water bodies extraction and classification from SPOT image[J].Journal of Remote Sensing,2001,5(3):214-219.
[22] 曹 凯,江 南,吕 恒,等.面向对象的SPOT 5影像城区水体信息提取研究[J].国土资源遥感,2007,19(2):27-30.doi:10.6046/gtzyyg.2007.02.07.Cao K,Jiang N,Lv H,et al.The extraction of water information in urban areas based on SPOT 5 image using object-orientedmethod[J].Remote Sensing for Land and Resources,2007,19(2):27-30.doi:10.6046/gtzyyg.2007.02.07.