一种用于探测器地外天体起飞试验的位姿及运动模拟装置
2015-12-23刘万龙孔凡超邱法维张奎好胡旭坤孙树江牛向楠
刘万龙,孔凡超,邱法维,张奎好,胡旭坤,孙树江,牛向楠
(1.北京航天试验技术研究所,北京 100074;2.北京三强同维机电液压科技发展有限公司,北京 102200)
0 引言
为了实现地外天体的表面详尽勘测,人类多次执行了地外天体的采样返回任务。1996年12月4日,美国NASA发射了“火星探路者号”探测器,并于1997年7月4日在火星表面着陆,向火星释放了人类第一部火星车[1-2]。2003年5月9日,日本用M-5 运载火箭发射了“隼鸟号”(Hayabusa)小行星探测器,对Itokawa 小行星(编号25143)进行采样勘测,并于2010年6月13日成功返回地球[3-4]。中国正在实施探月工程计划,已成功将“月兔号”月球车送上月球。而探月工程三期的主要任务是实现月面软着陆和自动采样返回,开 展月球科学探测[5-6]。
探测器在执行返回发射时,会遇到一些问题,如发射场地的地形对发射位姿的影响。探测器在研制中需要针对此问题开展充分的评价试验。在高真空环境下,探测器进行返回发射时还会受到发动机羽流的影响。在返回模块与着陆模块完全分离过程中,由于受到排放空间的限制,使发动机羽流效应更加明显,羽流扰动力可能对发射起飞造成较大影响。在空间环境模拟试验中测量和评价羽流力矩对返回模块的影响同时,还需要对返回模块的位姿和运动进行模拟。模拟试验须在真空舱内进行,通过位姿及运动模拟装置改变返回模块的姿态和运动。
1 位姿及运动模拟装置的用途与组成
按照试验需要,位姿及运动模拟装置具备静态位姿调整和动态位姿调整的功能,要求在真空舱内完成模拟试验。返回模块竖直安装在承力支架上,上端与力测量装置相连;着陆模块安装在位姿及运动模拟装置上,位于返回模块的正下方,通过位姿及运动模拟装置来改变着陆模块与返回模块之间的相对位姿和相对运动,如图1所示。
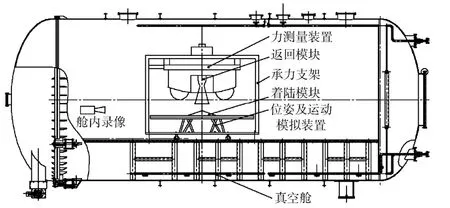
图1 位姿及运动模拟装置在真空舱内安装示意图 Fig.1 Schematic diagram of the attitude and motion simulation device in the vacuum chamber
真空舱内设有三排导轨,位姿及运动模拟装置固定在导轨上。位姿及运动模拟装置的位移、角度、加速度等参数测量信号为4~20 mA 电流信号,各种信号控制电缆通过真空插头穿入真空舱。通过真空机组、液氮热沉、氦深冷泵使真空舱内环境满足模拟试验的空间环境要求。
1.1 位姿及运动模拟装置主要技术指标
位姿及运动模拟装置的主要技术指标如下:
1)静态位姿调整
① 着陆模块沿-z轴移动范围为0~400 mm, 位移控制精度优于1 mm;
② 着陆模块沿x轴移动范围为-100~100 mm,位移控制精度优于1 mm。
③ 着陆模块绕y轴转动范围为-6°~6°,角度控制精度优于0.1°。
2)动态位姿调整
① 可带动着陆模块沿-z轴方向快速移动,并要求其运动加速度与返回模块起飞时一致,测量系统的反应灵敏度优于10 ms,加速度曲线如图2所示。
② 静态承载能力>1.5 t,并确保在试验过程中不发生形变和位移。
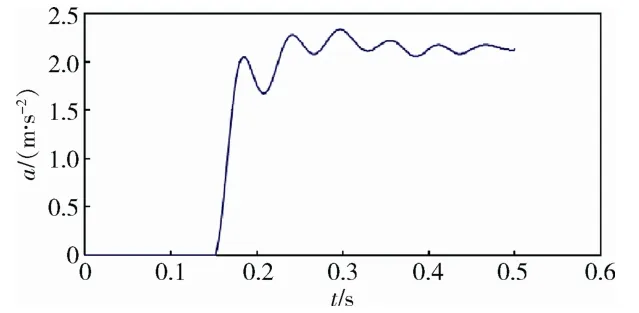
图2 返回模块起飞的加速度曲线 Fig.2 The acceleration curve of return module takeoff
1.2 位姿及运动模拟装置方案选择
位姿及运动模拟装置的工作原理类似于飞行模拟器[7]。根据试验的需要,位姿及运动模拟装置采用了六自由度Stewart 平台的结构形式,由上平台、下平台、6 个数字信号控制的电动作动器、控制系统和控制软件等组成(参见图3)。其中上平台与着陆模块相连,下平台与真空舱内的导轨相连。该装置可在其运动极限范围内,根据软件灵活设定其上平台的姿态和运动过程。电动作动器是一种技术先进的加载实验设备[8],不需要使用液压油及冷却水等,其突出的优点是无爬行现象、无噪声、无油、体积小、重量轻。电动作动器的传动部分采用了高精度的丝杠和润滑装置,可以长期使用免维护。
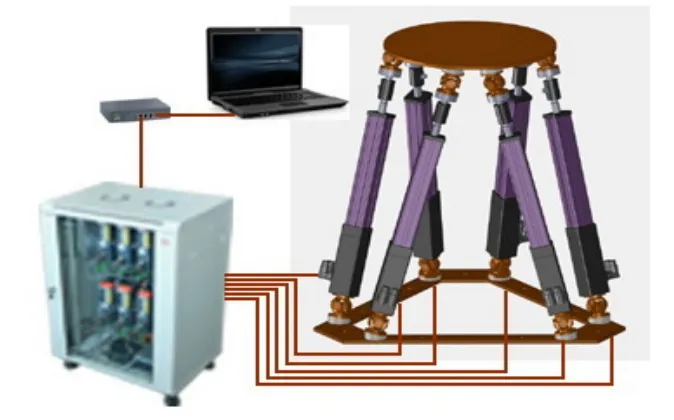
图3 运动模拟装置示意图 Fig.3 Schematic diagram of the motion simulation device
六自由度Stewart 平台的运动描述采用2 个坐标系,上平台运动采用Oxyz动坐标系,下平台采用O′x′y′z′ 静坐标系(又称参考坐标系)。动坐标系的原点选取为负载物和上平台的综合质心,垂直方向为z方向,x方向和y方向如图4所示。

图4 运动平台的坐标定义 Fig.4 Coordinates for the motion platform
1.3 位姿及运动模拟装置的平台设计
位姿及运动模拟装置的运动控制原理为:在位移控制模式下,设定上平台期望的姿态运动波形,据此波形可以求出每一个时刻点上的期望姿态Q=(q1,q2,q3,q4,q5,q6),根据该期望姿态进一步计算出相应的位移控制指令 即各作动器的伸缩量ΔLi,并传送给控制器进行实际的控制操作,该计算过程称为位置逆解[9-10]。根据位姿及运动模拟装置主要技术指标设计的平台结构及尺寸如图5所示。中位时,x方向位移范围为 ±470 mm,y方向位移范围为±440 mm,z方向最大位移为490 mm,绕x轴和y轴的转动角度范围分别为±22°和±21°。作动器全收缩状态时的两端球铰中心距为800 mm,作动器行程为450 mm。

图5 平台结构及外形尺寸 Fig.5 Overall dimensions of the platform
2 模拟装置的控制系统
2.1 平台的控制原理
平台运动控制系统是一种典型的多轴实时运动控制系统[11],传统的控制方式有电液驱动、电动驱动。本文设计的控制系统采用了可编程计算机控制器、数字智能伺服系统和专用软件操作系统来实现平台的控制。
平台采用集中管理、分散控制的上位机+下位机的模式,其中上位机采用工控机,主要完成指令的输入,平台的位姿逆解计算,参数的设定,控制过程的实时显示,数据处理、存储、打印以及系统安全保护;下位机由主控制器、6 个驱动与执行机构(由驱动器和作动器组成)以及传感器组成,主要是执行指令并完成动作和数据采集及反馈。控制系统结构原理如图6所示。上位机与主控制器间通过实时以太网通信方式传输指令和参数,而主控制器通过实时通信网络控制驱动与执行机构来驱动平台,实现运动控制。数据采集和处理采用专用高速数据处理模块,将各个传感器采集到的数据传送至主控制器,并通过与上位机之间的通信接口,将数据实时显示和存储在上位机中,以便用户进行数据比较、分析计算。
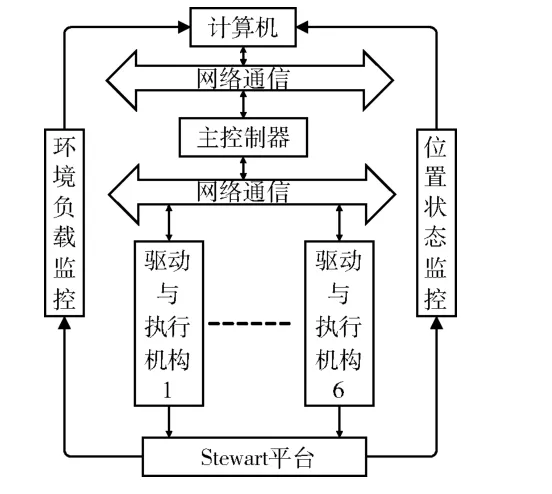
图6 控制系统结构图 Fig.6 The control system structure
2.2 上位机控制
上位机控制软件在Windows 操作平台下,利用VisualC++语言和面向对象的软件开发方法设计了上位机控制软件,以实现可视化用户界面。上位机与下位机之间的通信采用标准的以太网通信接口。用户通过上位机进行相关的数据输入、参数设定、路径规划、任务指定等工作。上位机的主要任务是指令控制和实时监测当前的工作情况,对它的人机交互功能、安全性和可靠性要求极高。因此,在选择上位机时既要考虑软件资源需求又要考虑硬件性能。上位机的主要功能如下:
1)控制指令的输入和调节参数的设定,可自动或者手动调整运行参数,如位移及速度控制指令等。上位机对位移传感器检测到的各作动器位置信号与指令给出的6 个自由度位置信号进行比 较,形成闭环控制,适时适当调整控制回路增益和参数。
2)实时可靠地反映当前的运行状态,监测各点传感器反馈的信号,如平台状态、作动器位移、各点载荷等,实现各种数据的实时显示、存储、打印等功能。
3)实现运行过程的故障报警以及对整个系统的监控和安全保护功能。实时监测平台的工作情况和关键指令的动作,通过软件限位保护确保平台的运动安全。
2.3 下位机控制
下位机工作过程主要有:
1)主控制器通过网络通信接收上位机给定的位姿信号并处理后,再通过网络通信向驱动器发送控制指令,驱动作动器平滑、稳定地伸缩。
2)接收传感器实时采集的平台姿态、过载、振动等信息,并将实时检测到的位移反馈给上位机;方便在上位机界面上观察。
下位机的主控制器拥有多任务的分时操作系统,系统功能强大,具有可靠性高、实时性强、稳定性好、效率高等优点。主控制器与上位机间采用实时以太网进行数据通信,各通道驱动执行机构通过网络通信与主控制器相互通信,还可实现人机对话。实现了实时控制与高速数据采集,从而保证了多通道的同步性控制精度在0.01 mm之内。下位机根据上位机下达的指令完成相应的控制,同时又向上位机反馈相应的位移和负载数据,在上位机进行实时显示和监控。
3 软件功能简介
位姿及运动模拟装置的软件系统可以实时显示平台的动画效果,并与实际平台保持同步,使用户可以生动、形象地在线观察平台的运动情况。软件界面如图7所示。
软件可以设置各种位移波形,如地震波、随机波、正弦波、三角波、方波等,并可以修改波形幅值及频率的大小及循环次数,观察实时反馈数据及图形,进行各种分析试验。软件可保存传感器所采集的试验数据,以数值和相关曲线的形式实时地显示平台的运动情况并对试验数据进行分析。具有位移闭环控制功能、输入波形与实际运动波形的比较功能、在线模拟运行功能(可以事先预测用户给定的位姿是否处于平台的正常运动空间内)。
软件设置了多种保护功能,如作动器的位移和载荷的超限保护,进行在线模拟运行检测时的位移限值保护及报警(如果超出了正常运动空间范围,则会启动位移限值保护及报警,可避免正式运行时发生意外)。

图7 软件界面 Fig.7 The software interface
4 结束语
本文借用六自由度Stewart 平台的设计思想设计了用于探测器地外天体返回起飞试验的位姿及运动模拟装置,根据模拟试验的需要,该装置主要具有静态和动态位姿调整的功能,其中静态位姿调整用来模拟地形不平对探测器返回模块返回起飞的影响,动态位姿调整用来模拟返回模块与着陆模块之间的相对运动,能够满足探测器在地外天体返回起飞过程中位姿及运动的模拟试验要求。
(References)
[1] Folkner W M,Kahn R D,Preston R A.Mars dynamics from Earth-based tracking of the Mars Pathfinder lander[J].Journal of Geophysical Research,1997,102(E2): 4057-4064
[2] Folkner W M,Yoder C F,Yuan D N.Interior structure and seasonal mass redistribution of Mars from radio tracking of Mars Pathfinder[J].Science,1997,278(5): 1749-1752
[3] 庞统.日本隼鸟号小行星探测器返回地球[J].国际太空,2010(8): 28-33
[4] 羽子.日本隼鸟号小行星探测器起死回生[J].国际 太空,2011(1): 29-31
[5] 栾恩杰.中国的探月工程——中国航天第三个里程碑[J].中国工程科学,2006,8(10): 31-36 Luan Enjie.China’s lunar exploration program The third milestone for China’s space industry[J].Engineering Science,2006,8(10): 31-36
[6] 何绍改.回: 探月的飞越——九天揽月之四[J].国防科技工业,2007,16(10): 73-75 He Shaogai.Back: Flying over the moon - fourth step of plucking the moon out of the sky[J].Defense Science &Technology Industry,2007,16(10): 73-75
[7] 杨灏泉,赵克定,吴盛林,等.飞行模拟器六自由度运动系统的关键技术及研究现状[J].系统仿真学报,2002,14(1): 84-87 Yang Haoquan,Zhao Keding,Wu Shenglin,et al.Key technologies and developing state of 6-DOF motion system for flight simulator[J].Journal of System Simulation,2002,14(1): 84-87
[8] 蒋栋,赵争鸣,郭伟,等.双余度电动作动器电气设计与实验[J].清华大学学报: 自然科学版,2008,48(1): 5-8 Jiang Dong,Zhao Zhengming,Guo Wei,et al.Design and experiment of double redundancy electrical- mechanical actuator[J].Journal of Tsinghua University: Science &Technology,2008,48(1): 5-8
[9] 黄昔光,廖启征.空间6R 串联机器人机构位置逆解新算法[J].北京航空航天大学学报,2010,36(3): 295-298 Huang Xiguang,Liao Qizheng.New algorithm for inverse kinematics of 6R serial robot mechanism[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(3): 295-298
[10] 王战中,杨长建,刘超颖,等.MATLAB 环境下六自由度焊接机器人运动学逆解及优化[J].机械设计与制造,2013,41(7): 182-184 Wang Zhanzhong,Yang Changjian,Liu Chaoying,et al.Kinematics inverse solution and optimization of 6DOF welding robot with MATLAB[J].Machinery Design &Manufacture,2013,41(7): 182-184
[11] 韩庆瑶,赵忠华.基于NURBS 的复杂曲线多轴运动控制轨迹生成的研究[J].机床与液压,2014,42(8): 106-109 Han Qingyao,Zhao Zhonghua.Study of multi-axis motion controlled trajectory generation of complex curves based on NURBS[J].Machine Tool &Hydraulics,2014,42(8): 106-109
