一种参数化轨迹增强的TBD算法
2015-12-22何嘉懿廖桂生杨志伟孙存光
何嘉懿,廖桂生,杨志伟,孙存光
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
一种参数化轨迹增强的TBD算法
何嘉懿,廖桂生,杨志伟,孙存光
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
针对高机动目标在低信噪比情况下难以稳定跟踪的问题,利用检测前跟踪思想,提出一种综合利用目标状态与轨迹增强算子来实现闭环反馈的高机动目标跟踪新方法.首先,针对多帧原始数据进行非参数化的航迹起始批处理操作,得到目标点迹集合;然后,依据实时更新的目标状态参数和量测误差设计相应的参数化轨迹增强算子;最后,结合当前量测并使用参数化轨迹增强操作进行预测跟踪.该方法在轨迹增强操作时充分利用了多帧的量测和状态,具有闭环反馈特性,实现了检测跟踪一体化处理,能够提高低信噪比条件下的检测跟踪准确度和精度.仿真实验表明,所提方法与经典检测前跟踪方法相比,在实时性上更优,且在性能上近似;相比高斯和滤波方法在稳定跟踪性能和跟踪精度上都有较大改善.
目标跟踪;检测前跟踪;多帧检测;航迹起始;边缘检测
针对低信噪比情况下的检测跟踪问题,为避免因信噪比低而造成的目标漏检情况,通常采用检测前跟踪(Track Before Detect,TBD)方法.TBD方法利用目标运动特性将目标检测问题简化为轨迹检测问题,没有门限判别造成的信息损失,经过多帧积累,检测结果与目标航迹同时得到.
典型的TBD算法[1-13]可分为TBD批处理算法和TBD递归算法两大类.其中TBD批处理算法有三维匹配滤波算法[1-2]、高阶相关算法[3]、基于投影变换算法[4]、多假设检验算法[5]、动态规划算法[6-7];典型的TBD递归算法包括递归贝叶斯滤波算法[8-10].三维匹配滤波算法是针对所有可能的目标轨迹设计一系列相应的三维匹配滤波器组,挑选输出信噪比最高的滤波器,并通过该滤波器所对应的状态确定目标在图像中的位置和运动轨迹.但该方法需预知目标的速度信息,当速度未知时,会有严重的失配损失.高阶相关算法是利用目标轨迹点的时空相关性,将轨迹点从噪声、杂波中区别开来.基于Hough变换方法是利用投影变换算法的典型代表,Hough变换法对于直线的检测和估计是很有效的,但对于复杂曲线的检测则存在计算复杂和需要大存储空间等缺点.基于多阶段假设检验TBD算法属于穷尽搜索方式,需要计算图像序列中所有可能的轨迹,当序列帧数变长时,轨迹的数目呈爆炸式增长,运算量巨大.基于动态规划的TBD算法将针对目标轨迹的搜索转变为多阶段决策优化问题,利用量测数据产生的值函数及设定的门限值判定是否宣布检测结果.基于递推贝叶斯滤波的TBD算法是利用前一时刻目标状态的后验概率密度以及当前时刻的最新量测估计当前时刻目标状态的后验概率密度.
上述TBD算法均存在计算复杂性高、实时性差等问题.笔者提出一种基于参数化轨迹增强的多帧TBD算法,通过采用有限步记忆递推更新的方式来引入跟踪思想,实现了检测跟踪一体化处理,能显著降低TBD算法的计算量;同时采用参数化的边缘增强处理实现了增强算子与目标状态估计的闭环反馈,具有在线更新特性,提高了低信噪比下的稳定跟踪性能.仿真实验表明,文中提出的基于参数化边缘增强TBD新方法能以较低的运算复杂度获得与TBD批处理方法相近的性能,稳定跟踪的信噪比门限能够降低到6dB,在低信噪比环境下对于机动目标可实现检测跟踪一体化处理.
1 动态模型和量测模型
假设雷达扫描跟踪时,第k帧量测数据有斜距rk、方位角αk、俯仰角βk、多普勒频率fd,k、幅度Ak等.以传感器图像距离-多普勒图像为例,目标轨迹状态矢量Xk=[rk,fd,k,Ak]T,其中rk、fd,k和Ak分别表示目标在距离多普勒图像中的距离门数据、多普勒数据和接收信号幅度.距离多普勒图像中的目标轨迹可表示为

其中,Fk是系统动态模型,wk表示由模型不精确和其他因素引入的过程噪声,协方差矩阵为Qk.
假设传感器产生整个监视跟踪区域的二维灰度图像,每一帧图像有Nr×Nfd个分辨单元(即像素点),其中,Nr表示距离单元数目,Nfd表示多普勒单元数目,文中不考虑距离模糊和多普勒模糊问题.
第k帧的每一个分辨单元(i,j),i=1,…,Nr,j=1,…,Nfd,对应区域的强度量测数据为

其中,H1表示目标存在,H0表示目标不存在;是(i,j)处的量测噪声,协方差矩阵为Rk,假设各个分辨单元及各帧图像之间,量测噪声相互独立.为目标对分辨单元(i,j)的信号强度贡献.
同理,可针对方位-俯仰图,距离-时间图,距离-方位图使用该算法进行跟踪.
2 算法描述
检测前跟踪方法不执行门限判别,没有信息损失,通过多帧数据的非相干积累,能够在低信噪比情况下进行探测-跟踪处理操作.但常规TBD算法计算复杂度高,笔者提出一种基于参数化轨迹增强的多帧TBD算法(记为PTE-TBD),算法流程如图1所示.该算法首先进行非参数化航迹起始批处理操作,获得目标状态的初始值;然后进行参数化轨迹增强操作.在参数化轨迹增强操作中,增强算子由目标状态估计实时更新,其走向由目标运动参数决定,宽度由量测误差决定,长度由积累数决定.PTE-TBD算法通过采用递推更新的方式引入跟踪思想,能显著降低TBD算法的计算量.另外,PTE-TBD算法使用增强算子对目标轨迹进行增强检测,关联多帧的量测,能够降低噪声对状态估计的影响;并且具有闭环反馈特性,能够提高目标跟踪准确度.算法操作步骤详细说明如下:
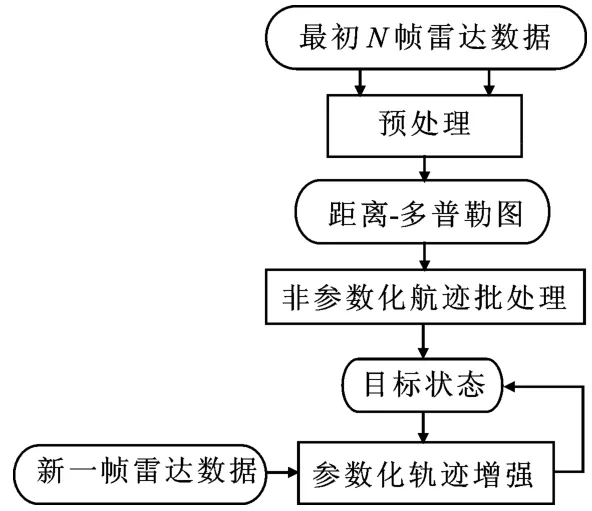
图1 文中算法框图
Step1 预处理步骤.针对N帧原始雷达数据进行数据预处理以使空间时间对准,得到距离-多普勒图像.
对应距离-多普勒图像的量测数据可用集合表示为

Step2 非参数化航迹批处理操作.对于距离-多普勒图像进行非参数化航迹批处理操作,即传统的图像域航迹起始方法,没有任何先验信息,得到目标轨迹,即得到N个时刻的目标距离、多普勒信息.
非参数化航迹批处理操作得到的起始目标轨迹用点迹集合表示为

其中,T1:N表示目标的轨迹点集合,Xk=[rk,fd,k,Ak]T,表示目标在第k帧对应的目标点迹状态矢量,rk、fd,k和Ak依次表示目标第k帧在距离-多普勒图像域中横轴方向距离门数据、纵轴方向多普勒数据与幅度.
根据单目标起始轨迹{T1:N}={Xk,k=1,…,N},容易得到对应的目标运动状态参数cX.将此处非参数化航迹批处理操作得到的起始目标轨迹状态和运动状态参数作为参数化轨迹增强的初始值.
Step3 参数化轨迹增强操作.图像中的边缘检测算子一般是普适性的,缺乏数据自适应能力.当已知一段边缘,可以依据这一已知边缘段的信息推知其相邻单元的边缘,做相应的增强.基于这一处理思路,采用参数化轨迹增强操作,框图如图2所示.依据第m步的目标状态信息Xm和Pm,确定出第m+1步L(奇数)个可能的目标轨迹走向,即可得到滤波器参数l=1,…,L,又对应L个匹配的增强算子滤波器.分别使用这L个滤波器对输入量测进行状态滤波,各滤波器结果按走向可能性加权Wl,l=1,…,L,得到最终的目标状态Xm+1,Pm+1.
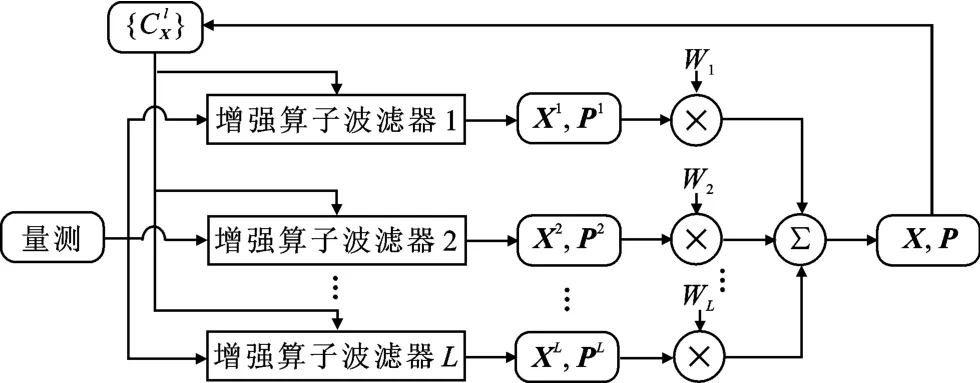
图2 参数化轨迹增强操作框图

在参数化轨迹增强操作中,增强算子滤波器的使用能够提高低信噪比环境下的目标检测跟踪性能;多方向的加权融合操作,能够降低目标状态估计的起伏.
3 仿真实验
为了说明该算法的检测和跟踪性能,进行了如下仿真实验.
(1)高斯背景.地基雷达观测空中飞行目标,观测空间范围为103~106 km,方位角0°~90°.将雷达置于坐标原点,建立如图3(a)所示的坐标系.观测初始时刻,目标位于图示坐标系的(98 668 m,35 912 m)处,首先沿Z轴正向以200 m/s的速度运动10 s,然后进行转弯运动10 s,设角速度为0.05πrad/s,最后沿Y轴负向以200 m/s的速度运动10 s.雷达扫描周期为0.1 s,距离分辨率为20 m,观测时长为30 s,则共有150个距离分辨单元,300个时间帧.则信噪比为6 dB时目标轨迹的距离-时间图像如图3(b)所示,针对地基对空观测数据,跟踪的结果如图3(c)所示.
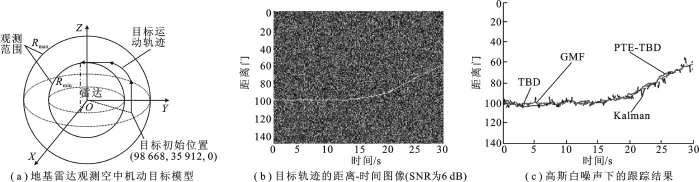
图3 高斯背景下仿真示例
(2)海杂波背景.假设岸基雷达天线架高H=310 m,以垂直雷达所在海岸线方向为X轴方向,平行海岸线方向为Y轴方向,垂直向上重力反方向为Z轴方向建立如图4(a)所示的坐标系.则雷达位置坐标为(0,0,310),海面快艇目标以为中心(41 800,41 000,0),半径400 m进行匀速圆周运动,角速度为0.2πrad/s,假设观测初始时刻目标位(41 800,41 400,0).距离分辨率为15 m,观测时长为5 s,则共有100个距离分辨单元,1 000个时间帧.则信杂噪比为6 dB时目标轨迹的距离-时间图像如图4(b)所示.针对地基对海观测数据,跟踪的结果如图4(c)所示.从中可以看出,海杂波背景跟踪结果比高斯白噪声背景差一些,同时卡尔曼滤波方法不适用于目标机动场合,文中参数化轨迹增强TBD方法、高斯和滤波方法和TBD批处理算法都能完成跟踪,文中方法的跟踪误差比高斯和滤波方法的小一些,与TBD批处理算法的结果相近.

图4 海杂波下的仿真示例
(3)算法性能仿真.为了衡量算法的检测性能和跟踪性能,参考文献[14],采用如下一些性能评估量进行性能评估:
①使用均方根误差评估跟踪到的目标轨迹与真实轨迹之间的定位偏差,均方根误差的计算公式为

②目标检测概率,最终检测跟踪到的目标轨迹是正确的在真实目标轨迹总长中的比例.

③目标连续可靠检测概率,连续3帧均跟踪到真实目标的比例.

④目标检测虚警概率,最终检测跟踪到的目标轨迹不正确的比例.

为对比该算法、TBD批处理算法、高斯和滤波方法及Kalman跟踪方法的算法性能,进行了100次蒙特卡洛实验.跟踪结果的均方根误差、稳定跟踪概率、目标检测可靠跟踪概率和目标检测虚警概率随信噪比变化曲线分别依次为图5(a)、(b)、(c)和(d).其中,参数化轨迹增强掩膜模板长度为40个像素单元时,使用文中PTE-TBD算法对机动目标跟踪时,如图中“●实线”所示.使用TBD批处理算法跟踪时,如“★点线”所示.使用高斯和滤波方法,设计目标状态模型个数4个,系统噪声模型个数2个,量测噪声模型个数1个,虚警概率10-2情况下跟踪时,如“虚线”所示.使用Kalman算法跟踪时,如“◆点划线”所示.从图中可以看出,当信噪比大于等于6 dB时,参数化轨迹增强方法和TBD批处理方法的目标检测概率高于0.9,目标检测可靠跟踪概率也高于0.9,目标检测虚警概率低于0.1,此时目标跟踪均方根误差小于3个距离单元.而高斯和滤波方法需要在信噪比高于9 dB时,Kalman跟踪方法需要在信噪比高于13 dB时,才能达到目标检测概率高于0.9、目标检测可靠跟踪概率也高于0.9、目标检测虚警概率低于0.1的条件,此时目标跟踪均方根误差小于3个距离单元.从算法性能曲线中可以明显得到如下结论:文中算法能达到TBD批处理算法的检测跟踪性能,优于高斯和滤波算法,相比传统检测后跟踪的方法在性能上可以提升7 dB的性噪比.所提方法能够在信噪比低至6 dB时稳定有效跟踪到机动目标.

图5 高斯白噪声背景下检测、跟踪性能对比曲线
4 结束语
在探测跟踪远距离、回波信号微弱的小机动目标时,TBD技术与DBT技术相比,能够避免因信噪比低而造成的航迹漏检问题,可以提高检测概率.但常规TBD算法均存在计算复杂度高的问题,文中基于检测前跟踪思想,提出一种目标状态与轨迹增强算子闭环反馈实时更新的多帧数据检测前跟踪新方法.该方法通过采用有限步记忆递推更新的方式,引入跟踪思想,从而实现检测跟踪一体化处理;同时采用参数化的轨迹增强处理辅助实现目标检测与跟踪,具有闭环反馈性能,能够提高目标跟踪准确度.仿真实验分析表明,PTETBD方法能以较低的运算复杂度获得与TBD批处理方法相近的性能,能够在信噪比低至6 dB时稳定有效跟踪机动小目标.
参考文献:
[1]Reed I S,Gagliardi R M,Stotts L B.Optical Moving Target Detection with 3-D Matched Filtering[J].IEEE Transactions on Aerospace and Electronic Systems,1988,24(4):327-336.
[2]Chen Y.On Suboptimal Detection of 3-dimensional Moving Targets[J].IEEE Transactions on Aerospace and Electronic Systems,1989,25(3):343-350.
[3]Liou R,Azimi-Sadjadi M R.Dim Target Detection Using High Order Correlation Method[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(3):841-856.
[4] 左磊,李明,张晓伟,等.基于改进Hough变换的海面微弱目标检测[J].电子与信息学报,2012,34(4):923-928. Zuo Lei,Li Ming,Zhang Xiaowei,et al.Small-target Detection in Sea Clutter Based on Improved Hough Transform[J]. Journal of Electronics&Information Technology,2012,34(4):923-928.
[5]Blostein S D,Huang T S.Detecting Small Moving Objects in Image Sequences Using Sequential Hypothesis Testing[J]. IEEE Transactions on Signal Processing,1991,39(7):1611-1629.
[6]Yi W,Morelande M R,Kong L,et al.An Efficient Multi-frame Track-before-detect Algorithm for Multi-target Tracking[J].IEEE Journal of Selected Topics in Signal Processing,2013,7(3):421-434.
[7]Grossi E,Lops M,Venturino L.A Novel Dynamic Programming Algorithm for Track_before-detect in Radar Systems [J].IEEE Transactions on Signal Processing,2013,61(10):2608-2619.
[8]Georgy J,Noureldin A,Mellema G R.Clustered Mixture Particle Filter for Underwater Multitarget Tracking in Multistatic Active Sonobuoy Systems[J].IEEE Transactions on Systems,Man,and Cybernetics,Part C:Applications and Reviews,2012,42(4):547-560.
[9]Boers Y,Driessen J N.Multitarget Particle Filter Track before Detect Application[J].IEE Proceedings-Radar,Sonar and Navigation,2004,151(6):351-357.
[10]杨威,付耀文,龙建乾,等.基于有限集统计学理论的目标跟踪技术研究综述[J].电子学报,2012,40(7):1440-1448. Yang Wei,Fu Yaowen,Long Jianqian,et al.The FISST-based Target Tracking Techniques:a Survey[J].Acta Electronica Sinica,2012,40(7):1440-1448.
[11]张鹏,张林让,胡子军.HPRF雷达距离延拓检测前跟踪方法[J].西安电子科技大学学报,2014,41(5):207-212. Zhang Peng,Zhang Linrang,Hu Zijun.Tracking-before-detection Method Based on Range Extension for HPRF Radars [J].Journal of Xidian University,2014,41(5):207-212.
[12]高永婵,廖桂生,朱圣棋.复合高斯噪声中知识辅助的贝叶斯Rao检测方法[J].西安电子科技大学学报,2013,40 (6):46-51. Gao Yongchan,Liao Guisheng,Zhu Shengqi.Knowledge-aided Bayesian Rao Detection Approach in Compound Gaussian Noise[J].Journal of Xidian University,2013,40(6):46-51.
[13]李翠芸,江舟,姬红兵.一种新的未知杂波环境下的PHD滤波器[J].西安电子科技大学学报,2014,41(5):20-27. Li Cuiyun,Jiang Zhou,Ji Hongbing.Novel PHD Filter in Unknown Clutter Environment[J].Journal of Xidian University,2014,41(5):20-27.
[14]Deng X,Pi Y,Morelande M,et al.Track-before-detect Procedures for Low Pulse Repetition Frequency Surveillance Radars[J].IET Radar,Sonar&Navigation,2011,5(1):65-73.
(编辑:王 瑞)
Efficient track-before-detect algorithm based on the parameterized track enhancement
HE Jiayi,LIAO Guisheng,YANG Zhiwei,SUN Cunguang
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
To address the problem of detection and tracking in the environment of a low SNR,we propose a new multi-frame track-before-detect algorithm.First of all,the nonparametric tracking initial is made based on the unthresholded multi-frame data.The target’s plots can be obtained.Then the track enhancement operator is designed making use of the parameter of the target’s state and the measurement imprecision error.Finally,using the designed operator to do the parameterized track enhancement,the results of tracking can be obtained.The algorithm possesses the characteristics of close loop feedback between the state of the target’s trajectory and the track enhancement operator,which can improve the accuracy of detection and tracking and realize joint detection and tracking in a low SNR environment. Simulation results show that compared with the traditional track-before-detect the proposed method can obtain similar performance.The method can track stably in the case where the signal-to-noise ratio is 6 dB.
target tracking;track-before-detect;multi-frame detection;track initial;edge detection
TN95
A
1001-2400(2015)06-0017-06
10.3969/j.issn.1001-2400.2015.06.004
2014-05-31
时间:2015-03-13
国家重点基础研究发展计划资助项目(2011CB707001);中央高校基本科研业务费资助项目(K5051302007);长江学者和创新团队发展计划资助项目(IRT0954)
何嘉懿(1988-),女,西安电子科技大学博士研究生,E-mail:jyhe07056@126.com.
http://www.cnki.net/kcms/detail/61.1076.TN.20150313.1719.004.html
