卫星导航系统接收机原理与设计——之二
2015-12-20刘天雄
+ 刘天雄
卫星课堂
卫星导航系统接收机原理与设计——之二
+ 刘天雄
第二十六讲
2 接收机组成
2.1天线
2.2射频前端
2.2.1结构组成
2.2.2信号带宽
2.2.3从射频信号到中频基带信号
2.3数字信号处理模块
3 工作流程
上世纪九十年代,全球只有美国的GPS和俄罗斯的Glonass两大全球卫星导航系统,其中美国的GPS系统得到了广泛应用,第一代GPS用户接收机可以同时处理4~5路导航信号,只能给出用户的位置坐标信息。目前随着欧洲的Galileo以及中国的北斗(BDS)全球卫星导航系统的建设,卫星导航接收机相关技术也日臻完善,目前一般的导航接收机可以同时处理10或12路导航信号,某些高端接收机甚至可以同时处理上百路导航信号,极大地改善了信号的完好性和位置解算精度。
尽管对于不同的应用场景,对接收机的解算需求可能不同,由此导航接收机的实现方式可能也不完全相同,例如某些导航接收机还需要处理一些电离层改正、系统差分、信号完好性等辅助参数,但是卫星导航接收机的工作原理没有发生变化,不同类型的接收机工作过程基本相同。卫星导航接收机工作过程分为3个阶段,第一阶段为信号接收的射频前端处理,第二阶段为基带信号处理,包括信号的捕获和跟踪,第三阶段是求解PVT。
卫星导航接收机的每个基带信号处理通道均是独立工作,即,每个通道被接收机分配处理某颗卫星的某路信号。每个通道有捕获(Acquire)或跟踪(Track)两种工作模式。在捕获工作模式下,为了评估导航卫星(信号)是否在视界范围内,每个通道开展伪码延迟(code delay)和多普勒频移(Doppler frequency)二维搜索(2D search)。直到接收机检测到导航信号、同时估算出接收到的导航信号的伪码延迟和多普勒频移为止,基带信号处理通道始终保持在捕获工作模式。卫星导航接收机导航信号的捕获、跟踪及位置解算流程如图12所示。
信号捕获后,基带信号处理通道进入跟踪工作模式,根据载波频率和伪码相位的粗略估计值,跟踪电路利用延迟锁定环DLL和频率锁定环FLL不断分别进一步对码相位和载波频率进行更精确的同步,直到接收机本地生成的复制测距码信号与接收到的导航测距码信号完全同步,由此解调出导航电文。
在信号跟踪工作模式下,为了评估导航信号的跟踪状态,基带信号处理通道需要监控信号跟踪结果的质量。如果跟踪环路锁定检测指标低于设定的门限,则接收机认定信号处于失锁状态,基带信号处理通重新回到捕获工作模式,再次启动上述工作流程。导致信号失锁的原因有多种,例如卫星信号被遮挡、信号发生周跳(cycle slips on the signal)或者仅仅是初始捕获过程中信号噪声过大。
卫星导航信号的处理流程简述如下:
•天线单元接收卫星信号,经低噪放大器滤波放大后输出;

图12 卫星导航信号的捕获、跟踪及位置解算流程
•射频模块进行下变频、功率放大、滤波等处理,输出中频模拟信号;
•信号采样对中频模拟信号进行AD采样,输出数字中频;
•数字信号处理模块实现码跟踪、载波跟踪等处理,输出测量结果;
•定位解算处理模块根据导航电文获取卫星坐标信息和其它信息,利用多颗卫星的伪距等导航信息结果进行用户坐标定位解算,最终输出NMEA0183标准的用户坐标、时间等数据。
•导航信息处理模块得到标准NMEA0183数据后,根据应用功能的不同,将实现不同的作用,如显示、导航控制等。
•用户接口实现用户与接收机的交互以及控制。
下面以美国GPS系统比较典型的普通民用C/A码接收机和军用P(Y)码接收机为例,简述导航接收机的工作流程
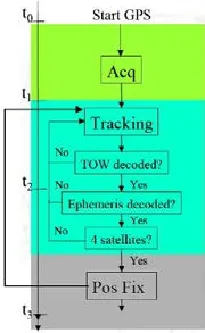
图13 GPS接收机的
第一步:信号捕获(signal acquisition)
捕获载波频率、码相位,信号捕获又称相位搜索(Search phase);
第二步:跟踪卫星(Track satellites)
利用两个耦合环路,伪码-延迟锁定环、载波-相位锁定环,调整本地复制信号;电文数据解码;
第三步:位置计算(position computation)
计算用户接收机到卫星之间的距离,卫星的位置坐标为动态已知点,卫星的轨道位置以历书和星历形式精确确定;
基带信号处理通道正常完成导航信号的捕获、跟踪后,给出伪距观测量和导航电文等信息,基于“三角定位原理(triangulate)”,接收机由此解算出用户的位置坐标、速度和时间。工作流程。
3.1民用C/A码GPS接收机的工作流程
对观测导航卫星数量的需求取决于不同的应用场景,对于水面舰艇等二维平面定位需求用户,导航接收机需要观测到与三颗导航卫星之间的距离;对于空中飞机等三维立体定位需求用户,接收机需要观测到与四颗导航卫星之间的距离。一般C/A码GPS接收机的工作流程如图13所示,
此外,卫星导航接收机还能利用以往历史定位解算数据或者最近解码的信息帮助跟踪环路提高信号捕获、跟踪的效率,例如,为了估计视场范围内哪些导航卫星可见,并由此将基带信号处理通道分配给可见的卫星,导航接收机可以利用存储电文的历书信息估计特定时段内可视导航卫星的编号,卫星编号与伪随机测距码一一对应,由此能够有效地提高对导航信号的捕获速度。因此,基带信号处理通道对导航信号的捕获方式可以分成“冷启动(cold start mode)”、“温启动(warm start mode)”和“热启动(hot start mode)”三类,简述如下:
•冷启动(cold start mode):接收机没有关于自身位置和可视范围内导航卫星的先验信息。由此,接收机的每个通道不得不对所有可能的卫星(信号)以及所有可能的伪码-多普勒频移对进行大量的搜索工作。只有当某个基带信号处理通道完全解码一个完整的导航电文被后,接收机通过历书信息才能推算可视范围的导航卫星,其他基带信号处理通道据此历书信息搜索可视范围表内的其他导航卫星;
•温启动(warm start mode):接收机读取自身的初始位置和卫星历书信息,例如上次关机前的位置和卫星历书信息,利用这些信息,接收机可以预测当前位置的可视范围内可能有哪些卫星,同时估计这些卫星信号的伪码延迟和多普勒频移,因此可以减少信号捕获的搜索空间。
•热启动(hot start mode):接收机有当前自身位置和可视范围内导航卫星的先验信息,因此,可以大幅度减少信号捕获的搜索空间,由此很快解算出用户位置。
3.2 军用P(Y)码型接收机的工作流程
GPS系统能为用户提供标准定位服务SPS和精密定位服务PPS,只有经过美国国防部授权的用户才能使用精密定位服务PPS,该服务能够提供更为精确的定位精度和授时精度。精密定位服务PPS以P(Y)码为基础,军用接收机捕获P(Y)码有C/A码引导捕获和直接捕获两种方法。P(Y)码是一种周期长、速率高的伪随机码,美军最初的设计思路是利用C/A码引导捕获P(Y)码,但在提高接收机抗干扰能力和反电子欺骗能力的诉求下,特别是对军用M码的直接捕获的要求下,对P(Y)码直接捕获成为GPS军用接收机的研究热点。
3.2.1 利用C/A码引导捕获P(Y)码
先捕获C/A码,再通过C/A码信息捕获P(Y)码是时域处理中的一种简便方法。通过搜索和检测,当接收机本地复制码和接收到的卫星测距码相关值最大时,表明接收机成功捕获C/A码。电文译码后,通过子桢遥测字TLM找到子桢的码相位,通过子桢交接字HOW找到字符计数的起始时间。如果没有出现误码,那么C/A码和P码是完全同步的,然后将C/A码产生的脉冲输入到P码生成器,这时本地产生的P码与接收到的P码是同步的。然后和C/A码捕获过程一样,对P码进行捕获、跟踪和解调,得到P码伪距后解算得到用户PVT。为防止漏捕,常常启动P码生成器时提前几个码片时间,再向后搜索。
通过C/A码信息捕获P(Y)码可以大幅度减少P码捕获的时间,利用C/A码引导捕获P(Y)码的过程是:
•捕获C/A码Search for a PRN C/A code lock
•跟踪C/A码、跟踪载波C/A code track, carrier track
•实现位同步、获取导航电文Obtain bit synchronization with the navigation message
•实现帧同步,即获取HOW和Z计数 Obtain frame synchronization, ie. obtain HOW and Z count
•解码Decoding
•剔除选择可用性信息 (Remove SA)
•引导捕获P(Y)码,P(Y)码锁定,载波锁定Transition to P(Y)-code, -code lock, -carrier lock
•P(Y)码数据锁定Data lock on P(Y) code
•搜索、捕获、跟踪第二颗~第四颗卫星信号Search, acquire and track 2nd to 4th SVs, up to all in view
•计算伪距和伪距变化率Take range and range rate measurements
•求解定位方程Solve for range equations
•捕获、跟踪和解调L2频点导航信号,完成双频电离层误差修正,提高定位精度。P(Y) code measurements L2 to remove ionospheric delays and refine navigation solution.
3.2.2 直接捕获P(Y)码
P(Y)码和C/A码的捕获过程都是用接收机本地复制伪码与接收到的信号伪码进行匹配和相关峰值检验,当匹配正确时将得到最大的相关峰值,从而确定伪码相位和载波频率。由于军用信号P(Y)码的速率高达10.23 Mchips/s,周期长达一星期,这就使得它不可能像C/A码那样在整个周期内搜索,更不可能将整个码信号存储在存储器中随时读取,在捕获方法上与C/A捕获存在本质区别。
对P(Y)码直接捕获的基本原理也是一个二维搜索过程,一方面,接收机需要通过移动本地伪码的相位与卫星信号测距码进行匹配,从而复现卫星的P(Y)码;另一方面,由于卫星与接收机之间相对运动所引起的多普勒效应,还需要对载波频率进行搜索。假设Δt和Δf分别表示待搜索时间范围和载波频率范围,σt和σf分别表示每次搜索的时间不确定度和载波频率不确定度,那么所需搜索的时间频率单元数为,
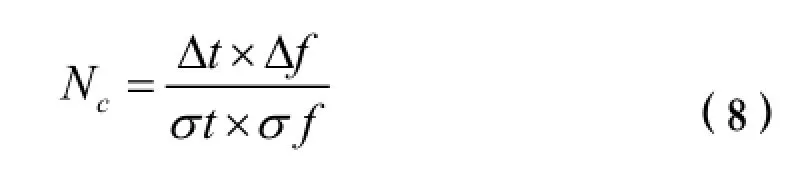
根据P(Y)码的自相关特性,时间不确定度σt一般取½码片长度,载波频率不确定度σf取值大小则与相关积分时间等因素有关。通过星历信息和其他一些网络辅助手段,可以估算待搜索时间范围Δt和载波频率范围Δf。估算精度越高,Δt和Δf越小,所需搜索的时间频率单元越小,搜索量越少,所需捕获时间越短。
若以单向串行的方式进行搜索,则平均捕获时间为,


若以双向方式从中心时刻依次向前后两个方向进行搜索,则当初始码相位服从高斯分布时对应某个固定的载波频率对码相位进行搜索的平均捕获时间为,
式(10)中,为搜索一个时间频率单元所耗费的平均时间,每产生一次虚警所消耗的时间是2。为正确码相位所在的位置。为时间频率单元数。
如前述,对P(Y)码直接捕获的实质也是用本地信号与接收到的卫星信号进行相关匹配,对P(Y)码直接捕获技术的研究大致分为两类,一类是以使用大规模并行相关器为基础的时域处理算法,在这方面以STS Y-EXPRESS ASIC为代表。另一类是以使用FFT处理技术为基础的各种频域处理算法,包括在此基础上所衍生出来的各种改进算法。两类算法的核心均是提高并行相关的能力。
时域并行相关处理算法的核心是利用并行相关器同时对多个时频单元进行搜索。在搜索前,首先根据当前接收机的位置信息、GNSS系统时间和导航卫星的轨道位置确定待搜索的时间频率范围。然后根据接收机自动增益控制器AGC所确定的干扰状况和要求的捕获概率、虚警概率等参数确定积分周期。一旦确定积分周期,每次并行搜索所能覆盖的时间频率范围以及搜索次数也就确定了。将经接收机前端处理后的卫星信号与本地伪码在并行相关器中进行相关处理,每次搜索完成后,将大于门限的峰值交给跟踪进程进行验证,以确定卫星信号的码相位和载波频率。
根据时域相关函数的傅立叶变换等于时域傅立叶变换之积的原理,可以采用傅立叶变换来进行相关计算,即频域相关技术。频域并行相关处理算法首先对卫星信号进行缓存,并作FFT处理,同时对本地伪码进行FFT共轭处理并去除多普勒频移影响,然后与卫星信号FFT处理后的结果相乘,在做IFFT处理,进行包络检测和峰值检测。若找到大于门限者就表示捕获成功,否则移动本地伪码相位,再次进行搜索。