基于iBeacon基站的室内定位技术研究*
2015-12-20石志京徐铁峰刘太君刘明伟
石志京,徐铁峰,刘太君,刘明伟
(1. 宁波大学信息科学与工程学院,浙江 宁波 315211;2. 宁波大学安捷伦联合实验室,浙江 宁波 315211)
基于iBeacon基站的室内定位技术研究*
石志京1,徐铁峰1,刘太君2,刘明伟1
(1. 宁波大学信息科学与工程学院,浙江 宁波 315211;2. 宁波大学安捷伦联合实验室,浙江 宁波 315211)
提出了一种基于iBeacon基站的室内定位方案。在该技术方案中,iBeacon基站由蓝牙4.0模块组建,在需要定位的室内空间均匀部署一定数量的iBeacon基站,该基站周期性地向外界广播自己独有的与位置信息对应的UUID号。当持有蓝牙终端设备的用户进入该基站感应区,接收到基站广播的UUID号及RSSI值,通过加权的三环定位算法即可对 用户进行精确定位。实验结果表明,该方案定位精度能达到2.5m以内,满足了绝大多数的室内定位技术要求。
iBeacon基站 蓝牙4.0 RSSI 三环定位算法
1 引言
现代社会中,室内定位技术[1]越来越得到各领域的青睐。如超市里的基于位置服务的消息推送功能,需要精确定位客户在商场中的位置才能给客户准确地推送商品相关信息;又如在采矿领域中,必须精确定位工作人员在井下的位置才能在紧急时刻迅速地施以救援。然而,目前主流的GPS定位技术[2]主要用在室外场景,而在室内环境下由于遮挡物的存在使无线信号发生折射、反射以及能量衰减[3]等现象,导致定位不准确甚至不能进行定位。由此,本文提出了一种高精度的室内定位技术:基于iBeacon基站[4]的室内定位技术。该技术将基站直接部署在室内空间,解决了GPS定位不能解决的穿越遮蔽物导致定位偏差及无法穿透厚重遮蔽物等问题。
2 系统概述
本系统由一定数量的iBeacon基站和蓝牙终端组成。其中,iBeacon基站核心控制器为TI公司的CC2540蓝牙芯片。该芯片使用了最新的BLE4.0技术[5],具有功耗小、时延低、传输距离远的特点,最大限度地满足了高精度室内定位技术的要求。所有的基站都均匀地分布在所需定位的室内空间中。当所需定位人员进入该空间中,通过手持蓝牙终端接收到iBeacon基站发送的与位置相关的UUID号[6]和RSSI值[7],通过加权的三环定位算法即可定位人员在室内的坐标位置。
3 RSSI测距原理
本方案使用了基于接收信号强度RSSI值的测距方法,即通过蓝牙终端接收到iBeacon基站发送的Measured_Power(与基站相距1m时的接收功率值)和经过无线信道衰减后的RSSI值。根据无线信号在室内空间中的传播模型,最终计算出蓝牙终端距离iBeacon基站的距离。
无线信号在自由空间中的传播模型[8]为:

其中P(d)和P(d0)分别为蓝牙终端距离iBeacon基站d米和d0米处的接收功率,单位为dBm;α[9]为无线信道衰减因子,同具体无线环境紧密相关;ξ[10]为一个均值为零,服从高斯分布的随机变量。在iBeacon基站技术中固定d0为1m,P(d0)即为距离iBeacon基站1m处的接收信号强度值,其为一固定值。从而无线信号的传播模型可简化为:

其中TX和α为经验值,需要通过对大量测量数据进行拟合得到,RSSI值直接能从蓝牙终端获得,而d即为需要通过计算得到的与基站的直线距离。
4 定位算法
本系统定位算法采用加权的三环定位算法。已知各iBeacon基站的坐标为i1(i1x,i1y)、i2(i2x, i2y)、…、in(inx,iny),待定位人员坐标为(x,y),则具体算法步骤为:
首先,通过蓝牙终端找到RSSI平均值最大的2个iBeacon基站,分别记为i1、i2,然后通过上述RSSI测距算法计算出蓝牙终端距离i1、i2的距离,分别记为r1、r2,这2个值仅仅为计算值,与实际值存在偏差。假设该偏差值为t,因此蓝牙终端距离i1、i2的实际距离分别分布在[r1-t,r1+t]和[r2-t,r2+t]的区间中。分别以r1±t、r2±t为半径,以2个基站坐标为圆心来画圆,可以得到2个相交的圆环。这2个圆环的相交有3种情况,具体如图1所示,图1中阴影部分即为目标对象所有的可能区域:

图1 两环相交图
初步确定目标位置后,再通过蓝牙终端找出RSSI平均值第3大的iBeacon,记为i3。计算出蓝牙终端距离i3的距离,记为r3。以i3坐标为圆心,r3±t为半径画圆,可以得到第3个圆环。根据第3个圆环与前两个圆环的相交区域可以进一步缩小目标对象的位置范围,从而更精确地定位目标对象坐标。
在图1(a)中,两圆环相交部分有2块,如图中阴影部分s1,s2所示。第3个圆环与该两个圆环相交必与s1,s2这2个阴影块中某一块有重叠。假设为s1,3个环相交图如图2所示。如此,目标对象的坐标便可得出,即为s1的加权[11]质心坐标,权重为距离的倒数,因此图1(a)中的最终目标位置为:


图2 相交为四边形
在图1(b)中2个圆环相交部分只有1块,以M N⌒弧中点Q为分割点将该阴影部分分为2个四边形,如图3所示。之后的处理方式跟图1(a)中的处理方式相同。
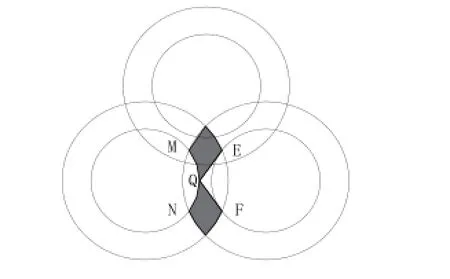
图3 相交为四边形
图1 (c)中2个环相交部分只有1块,即为阴影部分s4。第3个圆环与该2个圆环有2种相交情况,分别如图4、图5所示。

图4 相交为四边形

图5 相交为三角形
图4 中,3个环的相交部分为四边形,目标位置即为该四边形的加权质心位置,即
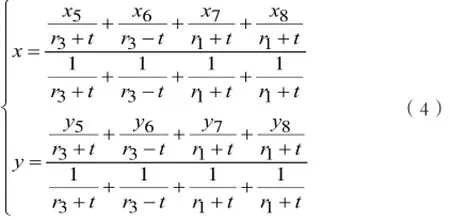
图5中,3个环的相交部分为三角形,目标位置即为该三角形的加权质心位置,即

5 测距及定位实验
5.1 测距实验
选择了一个6×12m2的空旷房间作为实验场地。首先进行测距实验:固定一个iBeacon基站于该房间中,然后分别在距离该iBeacon基站1m、1.5m、2m、…、12m处设置测试点,共23个测试点。在每个测试点上,通过蓝牙手机进行RSSI值采样,每个点共采样20次,即取20个RSSI样本点。然后对采集到的数据进行滤波[12],删除RSSI值最大和最小的各2个样本点,对剩下的16个样本点RSSI值取平均作为该测试点的最终RSSI值。对23个测试点进行测量后,得到最终的RSSI值与距离的对应关系如图6所示:
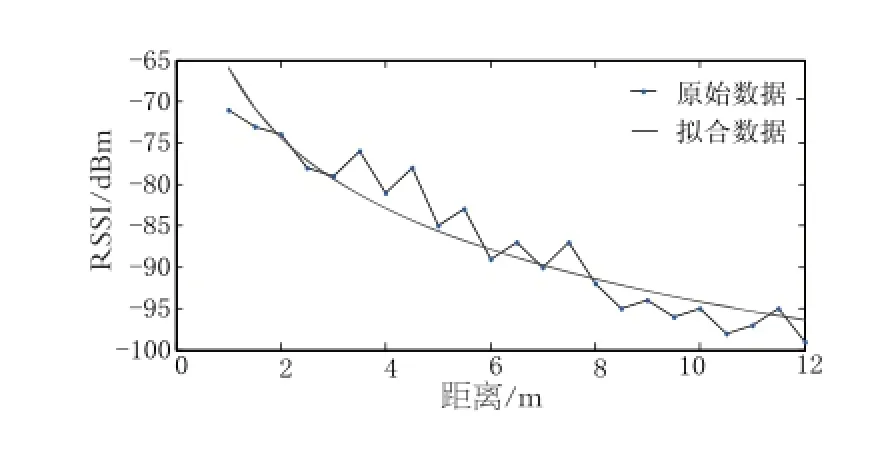
图6 RSSI值与距离d关系图
对该测试曲线用RSSI=a+blg(d)对数函数模型进行拟合,最终得到该曲线拟合函数为:

5.2 定位实验
在该6×12m2的空旷房间中部署6个iBeacon基站,然后再选取5个坐标值已知的点作为测试点,基站与测试点位置如图7所示。在所有5个测试点上,通过RSSI值和上述拟合函数计算出测试点与最近的3个iBeacon基站的距离。然后通过加权的三环定位算法最终得出测试点的坐标位置,将该坐标值与实际坐标值作比较,比较结果如表1所示。

图7 实验场地图

表1 实际坐标与计算坐标的比较结果
由表1可知该系统定位精度能达到2.5m以内。
6 结束语
本文提出了一种基于iBeacon基站的室内定位技术。首先通过RSSI值和拟合的RSSI值-距离函数,估算出目标对象与基站的直线距离;然后通过加权的三环定位算法计算出目标坐标的位置;最后通过实验对该算法进行了验证,可知该算法定位精度能达到2.5m以内,能满足绝大多数室内定位技术的要求。
[1] 赵锐,钟榜,朱祖礼,等. 室内定位技术及应用综述[J].电子科技, 2014,27(3): 154-157.
[2] 袁修孝,付建红,楼益栋. 基于精密单点定位技术的GPS辅助空中三角测量[J]. 测绘学报, 2007,36(3): 251-255.
[3] 王召召,邹澎,王瑶. 建筑物对通信信号衰减的定量研究[J]. 通信技术, 2010,43(5): 61-63.
[4] 尹贺. 利用iBeacon技术实现签到和投票功能应用研究[J]. 福建电脑, 2014(5): 137-138.
[5] 陈子龙,张红雨,李俊斌. 蓝牙4.0无线传感网数据采集及以太网传输设计[J]. 电声技术, 2013,37(10): 74-77.
[6] 马争,郝云飞. 蓝牙服务搜索的设计与实现[J]. 电子学报, 2003,31(11): 1758-1760.
[7] 方震,赵湛,郭鹏,等. 基于RSSI测距分析[J]. 传感技术学报, 2007,20(11): 2526-2530.
[8] 周艳,李海成. 基于RSSI无线传感器网络空间定位算法[J]. 通信学报, 2009,30(6): 75-79.
[9] 于慧霞. WSN中基于RSSI的加权质心定位算法的改进[J]. 电子测试, 2012(1): 28-32.
[10] 万国峰,钟俊,杨成慧. 改进的RSSI测距和定位算法[J]. 计算机应用研究, 2012,29(11): 4156-4158.
[11] 刘运杰,金明录,崔承毅. 基于RSSI的无线传感器网络修正加权质心定位算法[J]. 传感技术学报, 2010,23(5): 717-721.
[12] 刘志华,马征征,陈嘉兴. 无线传感器网络中移动节点的后验信号滤波定位法[J]. 传感技术学报, 2013,26(5): 739-744.★

石志京:硕士研究生就读于宁波大学,研究方向为无线通信技术。

徐铁峰:宁波大学教授,博士生导师,研究方向为通信与信息系统。

刘太君:宁波大学教授,博士生导师,研究方向为无线通信技术、认知无线电收发信机。
Research on Indoor Positioning Technique Based on iBeacon Base Station
SHI Zhi-jing1, XU Tie-feng1, LIU Tai-jun2, LIU Ming-wei1
(1. Faculty of Electrical Engineering and Computer Science, Ningbo University, Ningbo 315211, China; 2. Agilent Joint Laboratory of Ningbo University, Ningbo 315211, China)
A novel indoor positioning scheme based on iBeacon base station (BS) was proposed in this paper. In the proposed scheme, iBeacon BS is built by Bluetooth 4.0 module. iBeacon BSs are uniformly deployed in indoor space and these BSs periodically broadcast their own location information and the corresponding UUID. When a user with Bluetooth terminal device enters the induction zone of iBeacon BS, the user receives the UUID and RSSI broadcast by the BS. By means of the weighted three ring position algorithm, the user can be accurately positioned. Experimental results show that the precision of the proposed scheme reaches 2.5m to meet the most indoor positioning requirements.
iBeacon base station Bluetooth 4.0 RSSI position algorithm
10.3969/j.issn.1006-1010.2015.07.019
TP36
A
1006-1010(2015)07-0088-04
石志京,徐铁峰,刘太君,等. 基于iBeacon基站的室内定位技术研究[J]. 移动通信, 2015,39(7): 88-91.
国家自然科学基金项目(61171040);浙江省重大专项重点国际合作项目(2010C14007);浙江省自然科学基金(Y1101270)
2015-01-11
责任编辑:刘妙 liumiao@mbcom.cn
