棉条在线检测系统的动态性能分析
2015-12-18贾成举
贾成举
(沈阳宏大纺织机械有限责任公司,沈阳 110141)
0 引言
随着电子信息技术的不断发展,当代并条机上相继采用了高性能计算机、高精度传感器、变频调速技术,这使得并条机出条速度的记录不断被刷新,目前已达到1100 m/min(立达RSB D22型并条机的车速已经达到2×1100 m/min)。自调匀整的控制技术和实现手段都在不断发展,自调匀整性能在稳步提高。
由于自调匀整控制方式的多样化,在生产不同品种棉条时的输出速度差异较大。一般的开环式匀整系统未在棉条输出端设置检测点[1],控制系统根据喂入检测信号调节牵伸倍数后直接输出须条;为在线监测匀整效果,现代智能匀整系统增加了在线检测喇叭口,使用压力或位移传感器在线检测匀整效果[2],因此,棉条在线检测系统的动态特性对检测系统精度至关重要。
通过对在线检测系统动态特性的对比分析,可以提高在线检测系统的精度,为进一步完善自调匀整系统的效果提供技术支持。
1 分析目的与主要内容
1.1 目的
比较两种在线检测系统的结构特点和动力学特征,给出优化检测结构的方向,提高检测精度。
1.2 主要内容
分析的主要内容有两方面:① 分析比较两种机构对检测系统的影响;② 对检测机构进行振动模态分析。
2 检测机构模型简化
A型检测装置的结构如图1所示,后压辊的位置固定,前压辊绕轴z转动,棉条从前、后压辊间穿过,棉条厚度的变化使得前压辊在平衡位置绕z轴微小振动[3]。经牵伸后的棉条厚度变化量非常小,角度变化量θ很小,sinθ≈θ成立,位移传感器检测到的位移信号x≈R sinθ≈Rθ。将系统简化为单自由度质量—弹簧—阻尼振动系统,如图1所示。
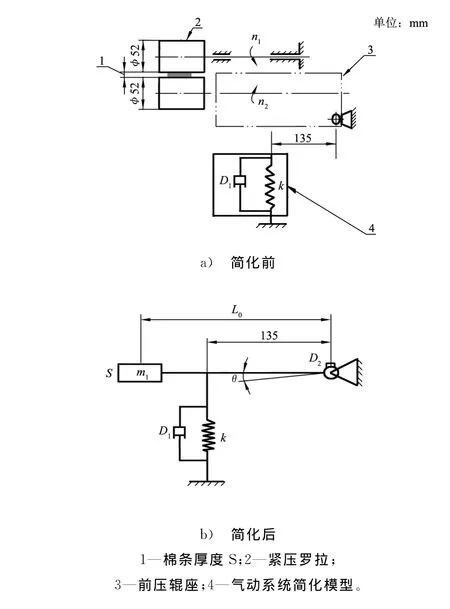
图1 A型检测装置示意
B型检测装置的结构见图2。与A型的分析方法完全相同,忽略掉摩擦阻尼,仅考虑气缸附加的粘性阻尼。
3 检测系统的瞬态分析
瞬态响应为系统在某一输入信号的作用下输出量从初始状态到稳态的响应过程。系统性能指标在时域和频域内都可以提出,时域内体现得更直观,因为一般储能元件收到输入信号时不能立即反应,表现出一定的过渡过程[4]。时域分析性能指标是以系统对单位阶跃信号输入的瞬态相应给出。在这里,由于气动系统阻尼的复杂可变性,给出系统有可能存在的3种阻尼形式,以B型检测装置为例。

图2 B型检测装置示意
3.1 欠阻尼
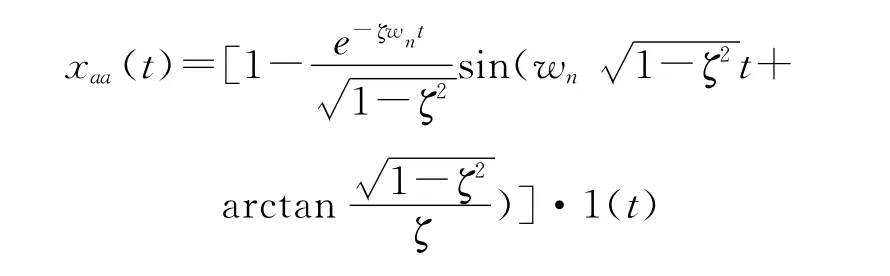
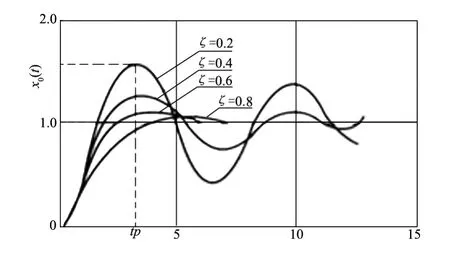
图3 欠阻尼二阶系统的单位阶跃响应
求解时域分析性能指标:
a) 峰值时间tp:响应曲线从零时刻到达峰值的时间,即响应曲线从零上升到第1个峰值点所需要的时间。
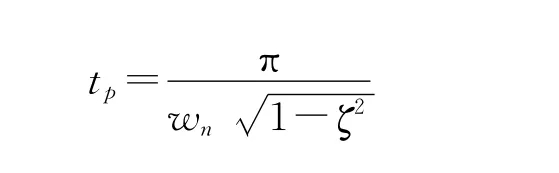
从上节稳态分析可知:

wn(A型)>wn(B型),所以 A 型比B 型首先到达峰值。
b) 最大超调量Mp:单位阶跃输入时,响应曲线的最大峰值与稳态值的差,通常用百分数表示。

ζ(A 型)>ζ(B 型),所以 Mp(A 型)<Mp(B型)。
c) 调整时间ts:响应曲线达到并一直保持在允许误差范围内的最短时间。以进入±5%的误差范围为例[6]。
当阻尼比ζ较小时,有

因为n(A型)>n(B型),A 型检测装置的调整时间比B型短,响应速度较B型快。
3.2 临界阻尼
当ζ=1时,称为临界阻尼,响应曲线如图4。由图可见,系统没有超调。
3.3 过阻尼
当ζ>1时,称为过阻尼,响应曲线如图5。由图5可见,系统未超调,且过渡时间较长。一般二阶系统都有正阻尼,此时系统是稳定的。这种情况对应气缸内的摩擦阻尼和粘性阻尼增大后,此时系统在给定位移阶跃信号下,运动非常缓慢,甚至很快停在某个位置,并没有到达平衡点,这是因为前压辊不断克服较大的阻尼,系统的能量大都损耗在克服阻尼上。
通过比较两种结构的时域性能指标可以看出,A型检测装置的响应速度比B型快,超调量较小,系统是稳定的。
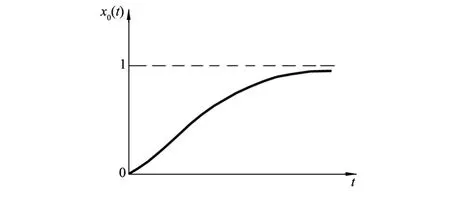
图4 临界阻尼二阶系统的单位阶跃响应

图5 过阻尼二阶系统的单位阶跃响应
4 压辊形状对监测系统的影响
棉条经过压辊的瞬间,棉条与压辊可以近似为线面接触,如图6所示,黑色区域为棉条,可得棉条的截面积:

图6 压辊形状的影响
其中:
S(t)——棉条的截面积;
L——棉条的宽度,对于光辊,棉条的宽度不受束缚,可自由膨胀,所以LA型较大,而阶梯压辊限定了棉条宽度LB型。
所以LA型>LB型。
任意两个时刻的棉条厚度差:
ΔXA型=ΔS/LA型
ΔXB型=ΔS/LB型
因此,ΔXA型<ΔXB型。
棉条截面积相等的前提下,通过阶梯压辊的棉条变化量较光辊大,也意味着同样的棉条阶梯压辊的输入信号更强而更容易被检测到。
棉条截面积相等的前提下,棉条厚度的变化量与棉条宽度成反比;为保证检测的准确性,必须保证棉条宽度精确。对于光辊,棉条的宽度是自由膨胀形成的,不精确;但是,这种结构对光辊的加工和安装精度要求不严格,即使光辊沿轴向窜动,对宽度的影响也不大。对于阶梯压辊,棉条的宽度是靠压辊间的阶梯形成的,压辊台面的加工误差、轴向的窜动都会使L值发生变化,直接影响检测信号的准确性[7]。
综上,对于检测系统而言,阶梯压辊更有利于信号的检测,但对其机械加工精度和安装精度要求较高。光辊结构棉条的宽度是自由膨胀形成的,故检测精度不高、信号较弱;但是,对其机械加工精度和安装精度要求不高。
5 前压辊的振动模态分析
在系统分析时,将研究对象看成一个系统进行研究,在理论计算中将分析对象简化为一个具有质量的实体,实体的振动是一致的,这对分析和把握整个系统的特性很有必要。事实上,质量实体本身也有弹性刚度,在对刚体结构进行优化或者考察装置中某个具体部位的振动形式时,就有必要对结构进行模态分析。
所谓模态就是零部件的振动形式,刚体结构在不同方向的振动频率不同,也对应着不同的振动形式。当刚体结构确定时,振动形式只与刚体的约束形式有关,不同的约束形式对刚体的刚度影响程度不同,有的增强刚度,有的削弱刚度。
5.1 无约束时模态分析
无约束时模态分析去掉整个气动部分,只考虑前压辊刚体结构的特性。
不加约束时,B型检测装置去掉导轨,只是分析振动刚体的振动模态。6个自由度上无任何约束,故无振动;从第7个模态到第11个模态可以看出,两者的振动频率很接近,说明两个结构的原始特征很相近,这与事实相符合,验证了模拟是正确的,见表1。

表1 无约束状态下的振动模态列表
5.2 有约束时模态分析
加上约束后,A型检测装置为摆臂悬臂结构,B型检测装置为平动结构,平动结构的频率远大于摆臂结构,摆臂结构对刚体刚度的削弱较大,见表2。
综上所述,A型和B型检测装置的前压辊结构相似,但约束形式不同,前者为转动,后者为平动。通过仿真分析可知:未添加约束之前,两者的振动频率很接近,说明两个结构的原始特征很相近,这与事实相符合;加上约束后,摆动结构对刚体刚度的削弱较大,平动结构的频率远远大于摆臂结构。从材料力学的角度出发能够更形象的解释这种现象,平动结构相当于简支梁,抗弯刚度较大,摆动结构相当于悬臂梁。

表2 加约束条件后的振动模态列表
6 结论
6.1 从系统的角度出发,小阻尼情况下A型检测装置的共振频率和阻尼比大于B型;对于瞬态阶跃信号的响应速度较快、超调量较小;气动系统的阻尼和弹性是变化的,但只要阻尼非负系统未超调则仍然稳定。
6.2 位移传感器监测系统对压辊的加工精度和材料的热膨胀性能要求比较高;而乌斯特监测系统压辊只起到输送棉条的作用,对监测系统影响非常小。
6.3 阶梯压辊更有利于信号的检测,也对机械加工精度和安装精度要求较高;而光辊结构,棉条的宽度是自由膨胀形成的,检测精度不高、信号较弱,但是对机械加工精度和安装精度要求不太严格。
6.4 根据模态分析,A型检测的结构形式对本身刚度削弱的程度要大于B型,振动剧烈的位置集中在检测片上,应尽量减小检测片的质量,提高其刚度。
[1]秦贞俊.现代棉纺纺纱新技术[M].上海:东华大学出版社,2008:44-59.
[2]祝伯荣.自调匀整装置[M].北京:纺织工业出版社,1986:101-115.
[3]陈立善.自调匀整装置在并条机上的应用[J].棉纺织技术,1994,22(2):71-73.
[4]栾爱燕.高速并条机自调匀整装置的研制[D].青岛:青岛大学,2005.
[5]段学闯.基于自适应控制和模糊控制的并条机自调匀系统的研究[D].上海:东华大学,2012.
[6]康强,苏玉恒.在线检测技术在纺纱中的应用[J].河南纺织高等专科学校学报,2006,18(2):24-26.
[7]郭月洋,陈瑞琪.棉纺设备自调匀整系统发展方向的探讨[J].棉纺织技术,2002,30(5):29-32.
