中继系统在无人机电力巡视中的应用
2015-12-16宋福根黄俊璞
宋福根,林 韩,黄俊璞
(1.福建省福州大学,福州 350108;2.国网福建省电力公司,福州 350003;3.福建省电力试验研究院,福州 350007)
目前,我国110kV以上的电力线路近九十万公里,人工巡线作业工作量巨大,投入巨大的人力物力对输电线路进行定期巡视检查。传统的人工巡线工作方式效率较低,给安全管理带来许多隐患,对于保证电网的安全运行极为不利。随着无人飞行器技术的不断发展,由于无人机技术具有不受地形环境限制等多种优势,其搭载的可见光、红外热成像设备具有对运行电网准确的隐患发现能力[1]。因此该技术已成为应对各种自然灾害以及电网运行巡检、监控、维护、地理图实时成像更新的有力工具,并逐步代替传统的巡线工作方式[2]。
因很多输电线路分布在崇山峻岭之间,传统的“点对点”通信模式(即任务机通过无线链路直接与地面车载设备进行数据通信)很容易因为山峰等障碍物而阻隔通信,使得目前无人机只能在可视范围内飞行,限制了通信距离[3],并且伴有通信盲点的存在,在山区环境下其影响更为明显,给无人机巡线的效果和安全性带来极大挑战。因此,实现无人机的超视距、大范围的巡视飞行是无人机能否成功应用于大电网巡视的关键,而其关键技术就是通信中继技术的突破。因此,研究无人机的中继通信系统,实现无人机的超视距、远程飞行越来越具有重要意义。
国内外很多学者对无线通信中的中继通信方式的选择和算法都做了很多研究,特别是近年来随着无人机技术的不断进步和广泛应用,对无人机中继方式的选择和应用研究取得很大的成就。文献[3]提出了一种新的基于多级中继的无人机多链路定位方法,描述了无人机多级中继的选择和该方法与捷联惯导系统的组合。文献[4-6]对基于跨层机制和协作通信机制的中继方案选择做了详细说明,提出了基于放大重传和解码重传下最佳协作中继的选择准则。文献[7]提出了利用商业或军用通信卫星作为空中中继平台,建立无人机卫星中继数据链,实现我国远程无人机系统的超视距遥控、遥测和侦察信息实时传输的解决方案。文献[8]提出了应用于无人直升机上的中继转发系统的方案,论述了该系统的设计方案、总体结构、工作过程以及实现时遇到的技术难点、解决方案。文献[9]提出一种以无人机平台为基础的超视距多链路中继概念。综合上述文献,无人机由于不同的应用场合限制,无法利用某一种中继方式实现无人机超视距大范围的飞行,必须对各种中继方式进行对比分析,根据应用场合选择适合的中继方式才具有实际意义。
1 目前主要的无人机中继方式
无人机中继方式种类较多,下面主要就其中2类主要的中继通信方式进行分析。
1.1 基于地面中继节点的通信方式
基于地面中继节点的无线通信方式根据地面中继节点的特点,可细分为两类:基于公网资源的中继方式和基于自建地面中继节点的地面中继通信方式,下面分别就其通信系统的组成和特点进行讨论研究。
(1)基于公网通信中继方式
基于公网通信(GSM/GPRS/EVDO/WCDMA)中继方式即利用目前已经架设的3G通信网络作为信号通道进行双向信号的传输。该中继方式由于采用现有的公网通信网络,因而具有覆盖面广,运行成本低等优点;但是由于公网的设计要求不同于无人机通信指标的要求,所以也存在如下缺陷:
1)时延问题。采用双边拨号,延时3~6s;若采用3G网络传输图像,延时5~10s。即便是通信畅通的情况下,从发现问题到最终控制命令执行,延时8~16s。
2)安全问题。采用公网拨号,每个拨号端(地面站和任务机)各占用1个IP,都完全没有防护地暴露在公网,特别是任务机上不太可能安装一台专门的防火墙,任何人均可向任务机发送数据,可能造成严重后果。
3)高空效应。通信公司的宏基站采用定向天线,基站一般高40m,下倾角为12°~16°,在高层连接不稳定(主要是宏基站折射反射后到高层的信号,导致信号频繁切换通信掉线)。
4)覆盖问题。3G网络覆盖不完善,山区没有用户,并且建设的可能性很小。同时在高山上架设基站干扰范围大且易产生谷底“塔下黑”现象。
(2)基于自建地面中继节点的中继方式
这种方式存在通信延时较大、中继节点不一定在线路走廊等问题,可采用基于自建地面中继节点的中继方式来加以改善。该中继方式即在制高点上的输电杆塔安装中继转发设备,多方位布点,实现巡视范围的全覆盖。并且可以利用输电杆塔作为中继设备的搭载平台,电力供应可以采用微型风光互补供电系统或感应取电方式实现免维护;利用电网GIS系统进行中继站的规划选址。
基于自建地面中继的无人机通信系统示意图如图1所示。

图1 基于自建地面中继的无人机通信系统
基于地面中继的无人机通信系统由无人机载宽带无线图传设备、电力塔以及变电站接收中继设备、测控车接收中继设备、指挥中心接收和管理软件等几部分组成。测控车与无人机链路为双向链路,支持反向飞控数据链路。同时,测控车与指挥中心间也可实现音视频双向链路。前方无人直升机设备采集的视频可以通过变电站中继后传输到测控车,也可以传送到指挥中心,同时无人直升机可通过电力铁塔端的上行数据链路接收来自于测控车的飞控指令。
从其通信链路系统的组成可以看出,该中继方式具有可沿线路走廊布置地面中继节点,同时可利用电力系统自身杆塔等设备作为中继设备安装支点等优势。但是也存在地面自建中继节点较多,点多面广且户外安装的中继站工作环境恶劣,将来面临着设备老旧、维护更新等工作,并且维护成本较高。受铁塔高度的限制,通信中继覆盖范围仍然有限,无法突破100km以上的测控距离。
1.2 基于空中中继节点的无线通信方式
针对地面中继通信方式存在的布点过多、造价偏高以及灵活性较差等方面的不足,可采用基于空中中继节点的无线通信方式来完善[5-6]。基于空中中继节点的无线通信方式根据中继节点的特点,可细分为基于卫星中继方式和基于机载空中中继平台的无线通信方式两类。
(1)卫星中继方式
卫星中继方式主要通过通信卫星作为信号中继节点,由任务机发送图形、图像数据到通信卫星,之后再由中继卫星转发信号到地面控制站接收;同时地面控制站也可以通过向中继卫星发送控制信号等再中继转发至任务机,从而实现超视距飞行。
卫星中继方式具有全天候、全覆盖、通信灵活可靠等优点。但是按卫星通信来设计,每次飞行需专门申请卫星通道,除申请费用外,每分钟通道占用费用约10元,一次飞行费用(含申请费用)约上万元。通常卫星中继方式传输延时一般在3s以上,目前还不能完全满足无人机长时间贴近输电线路飞行的高精度、实时飞控要求。此外,卫星接收天线在无人机上的安装、定向、旋翼的影响等问题也尚未完全解决并取得试验成果,因此该中继方式在无人机电力线路巡检中的实际应用还有诸多技术问题有待解决。
(2)基于机载空中中继平台的无线通信方式
由于基于卫星中继的无人机电力线路巡检通信方式目前还未达到实用阶段,当前可采用基于机载空中中继平台的无线通信方式来对空中中继技术进行完善,该无线通信方式由前端无人机载发射端站、中继无人机站和地面站3部分组成。机载空中中继模式即在数据链路上增加一台中继飞机,任务机采集到的图像和遥测信号首先通过无线链路发送给中继机,通过中继机转发给地面测控车载终端,相反,地面测控车的控制指令也通过中继机转发给任务机终端,控制任务机的工作状态。在执行任务前,需在“无人机电力线路综合巡检控制系统”中预先规划好中继飞机的中继空域和巡检飞机的起飞点,中继飞机就位后无人直升机起飞执行巡视任务。基于机载空中中继的无人机通信系统示意图如图2所示。
该系统由于采用无人机作为中继平台,所以可以通过控制中继无人机的飞行高度实现超大范围的数据链路双向通信,同时其通信延时一般在200ms以内,而且可支持高速大流量的双向数据传输[10]。但是由于其引入了一台无人机作为中继,所以操作人员需同时操作至少两台无人机(任务机和中继机),操作控制较复杂,同时整个系统在前期设计和成本投入等都较大。
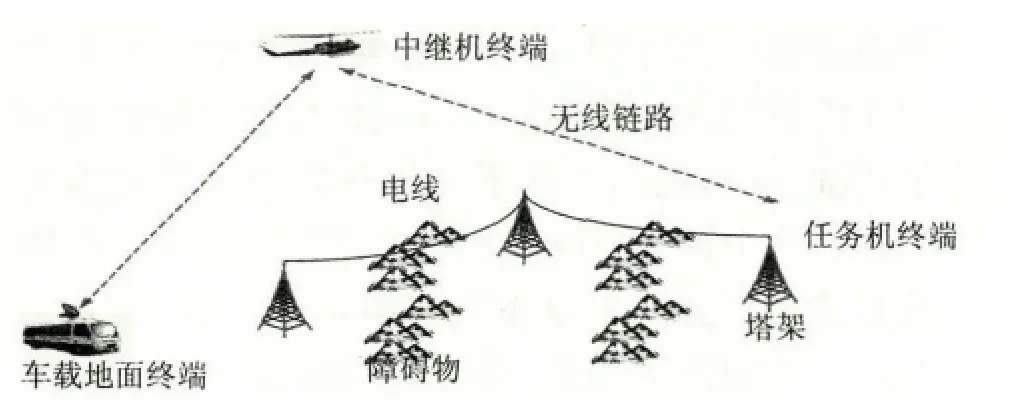
图2 基于机载空中中继的无人机通信系统示意图
2 电力系统无人机中继方式应用研究
基于地面自建中继的无人机中继测控链路稳定可靠,如条件允许可在变电站附近设中继站,利用光纤将测控车的数据传回指挥中心。所以地面中继方式具有链路稳定可靠,同时可以利用现有电力设备实现中继通信的优点[8]。
基于机载空中中继平台的无线通信方式通过增设一架中继无人机,搭载小型中继转发设备实现空中中继。中继飞机快速灵活,可任意机动到所需工作的空域,不受地型限制,同时中继转发设备仅需一套,维护及采购成本较固定。无人机可长时间在海拔数千米高空盘旋,执行中继通信任务,能够在很大范围内创造“地面站-中继无人机-巡检无人机”之间的通视条件,可以大大降低中继设备和前端发射机的功率,减轻设备重量和功耗。能够实现2W前端发射,5W中继,100km的通信测控能力,通信时延能够控制在200ms以内。这是其他几种方案所无法比拟的优势[11]。
针对地面中继和空中中继各自存在的局限,可结合两者优势,取长补短,同时通信光缆已在电网中广泛应用,可以采用光纤加无线混合中继模式,该通信系统如图3所示。
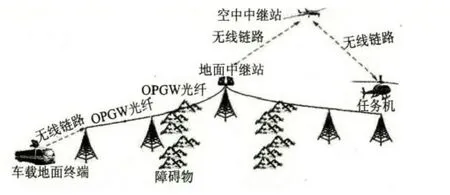
图3 基于光纤加无线混合中继的无人机通信系统
该通信方式不仅可以利用电力系统自身的设备资源,大大减少前期的成本投入和地面中继节点的数目,同时由于光纤具有通信“零”延时的优势,则可以大大加大空中中继方式的巡视范围,同时又可以克服通信延时这一颈项,因此是电力系统无人机巡检的主流中继通信技术。
3 结论
无人机作为电力系统电力线路巡检及防灾减灾的重要应用,为了实现超视距大范围的飞行,中继系统至关重要。由于基于自建地面中继和机载空中中继各自的优点,其在无人机中继中的应用越来越受到欢迎。
针对某些固定线路的定期巡检作业及平原地带的电网巡检应用,可通过在地面制高点安装中继,实现大范围的通信覆盖,这样既能大大减少地面中继的安装数量,同时成本投入也较少而且操作较简便。而对于一些突发的防灾减灾等巡视工作,则可利用基于机载空中中继的通信方式,利用中继飞机在数千米高空飞行实现其远距离通信的优越性,实现在特殊状况下的无人机巡视。因此,在无人机巡检中,可以采用以机载空中中继为主,地面自建中继为辅的综合巡检方式,实现大范围超视距巡检。为了减少前期成本投入,充分利用电力系统自身资源,采用基于光纤加无线混合中继的无人机通信方式将越来越受到欢迎。因此基于光纤加无线混合中继的无人机通信方式已经成为电力系统无人飞行器超视距巡视的一个重要发展研究方向,具有重要的实际应用意义。
[1] 张 柯,李海峰,王 伟.浅议直升机作业在我国特高压电网中的应用[J].高电压技术,2006,32(6):45-46.ZHANG Ke,LI Hai-feng,LI Wei,et al.Analysis of Helicopter Patrol Application Prospect in China's UHV Grid[J].High Voltage Engineering,2006,32(6):45-46.
[2] 于德明,沈 建.直升机与人工巡视效果对比分析[J].中国电力,2008,11(3):41-45.YU De-ming,SHEN Jian.Contrastive analysis of helicopter and manual patrol effect[J].Electric Power,2008,11(3):41-45.
[3] 诸燕平,黄大庆.基于多级中继的无人机多链路定位研究[J].仪器仪表学报,2006,27(2):29-32.Zhu Yang-ping,Huang Da-qing.Multipath geolocation method of UAV based on multilevel relay[J].Chinese Journal of Scientific Instrument,2006,27(2):29-32.
[4] 邹玉龙,郑宝玉.基于跨层机制的最佳协作中继选择及其系统实现[J].通信学报,2008,8(7):35-38.ZOU Yu-long ZHENG Bao-yu.Implementation of the optimal cooperative relay selection based on cross-layer mechanism[J],Journal on Communications.,2008,8(7):35-38.
[5] 顾文珊,张会生,李立欣,等.基于协作通信的最佳中继选择方案[J].信息安全与通信保密,2010(2):59-61.GU Wen-shan,ZHANG Hui-sheng,LI Li-xin,et al.A Best Relay Selection Scheme Based on Cooperative Communication[J].China Information Security,2010(2):59-61.
[6] 尹露娟,苑津莎.一种基于跨层机制的中继选择策略及实现[J].电力系统通信,2009,30(11):67-70.YIN Lu-juan,YUAN Jin-sha.Implementation of relay selection based on cross-layer mechanism[J].Telecommunications for Electric Power System,2009,30(11):67-70.
[7] 孟立峰.无人机系统的卫星中继数据链[J].飞行器测控学报,2012(5):24-27.MENG Li-feng.Satellite Relay Data Link for UAVs[J].Journal of Spacecraft TT&C Technology,2012(5):24-27.
[8] 郑 锴,童利标,陆文骏.应用无人机实现地面无线传感器网络通信中继的探讨[J].现代电子技术,2007,30(23):40-41,50.ZHENG Kai,TONG Li-biao,LU Wen-jun.Discussion on the Communication Relay of the Wireless Ground Sensor Network by Using UAV[J].Modern Electronic Technique,2007,30(23):40-41,50.
[9] 常啸鸣,张晓林,鲍君海,等.用于无人驾驶直升机的中继转发系统设计[J].北京航空航天大学学报,2009,35(6):747-752.CHANG Xiao-ming,ZHANG Xiao-lin,BAO Jun-hai,et al.Design for repeater system with wideband and high sensitivity used in pilotless helicopter[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(6):747-752.
[10] 欧阳键,庄 毅,薛 羽,等.非对称衰落信道下无人机中继传输方案及性能分析[J].航空学报,2013,34(1):130-140.OU yang-Jian,ZHUANG Yi,XUE Yu,et al.UAV Relay Transmission Scheme and Its Performance Analysis over Asymmetric Fading Channels[J].Acta Aeronautica et Astronautica Sinica,2013,34(1):130-140.
[11] 徐赞新,袁 坚,王 钺,等.一种支持移动自组网通信的多无人机中继网络[J].清华大学学报(自然科学版),2011(2):150-155.XU Zan-xin,YUAN Jian,WANG Yue,et al.UAV relay network to provide communications in mobile ad hoc networks[J].Journal of Tsinghua University(Science and Technology),2011(2):150-155.