利用A3数码航摄仪进行复杂地形控制点布设的研究
2015-12-11蒋春华中国科学院大学北京100049中国科学院地球物理研究所大地测量与地球动力学国家重点实验室湖北武汉430076
蒋春华(1.中国科学院大学,北京100049;2.中国科学院地球物理研究所大地测量与地球动力学国家重点实验室,湖北武汉430076)
一、引 言
航空摄影测量技术经历了模拟摄影测量和解析摄影测量阶段,发展到今天的全数字摄像测量阶段,已经成为快速测绘大面积4D产品的最重要手段[1]。随着航空摄影技术在测绘行业中应用越来越广泛,航摄领域出现了一大批数码航摄仪。目前以A3为代表的倾斜摄影仪崭露头角,A3航摄仪不仅测量快速、精确、经济,能够减少野外作业,减轻劳动强度,而且不受地理条件的限制,因此是以后大面积数字成图的一个重要发展方向。但是,目前在A3航摄仪外业控制布设方面并没有明确的指导方法,现有航空摄影测量的相关技术规范主要针对传统的摄影测量方式,传统外业控制布点时在航向上主要由所跨的基线数决定,如果A3航摄仪还用所跨基线数来确定控制点分布,会产生太多不必要的外业控制点,无形中给外业增加不必要的工作量[2]。另外,现有的数字航空摄影测量外业控制点布设方案较少且存在一定的局限性,并不能完全适应于A3航摄仪。外业控制测量及控制点布设方面,理论支撑或可借鉴的生产经验也不多[3]。
本文针对A3航摄仪外业控制点布设,提出了5种控制点的布设方案,通过试验区数据解算,比对在不同控制点布设方案下,空三处理结果中地面定向点和检查点的精度变化,分析其变化规律性。提出一种既能满足航测内业量测精度要求又能减少外业工作量的合理布点方案,为A3航摄仪在生产应用中提供可靠的控制点布设参考方案。
二、A3航摄仪优势分析
A3数字成像系统包括宽幅航空摄影相机与自动化数据处理系统两部分。同常规数码航摄仪相比,A3航摄仪具有以下优势:①影像分辨率高,A3相机搭载300 mm的镜头,采用长焦距光学镜头获取高分辨率影像;②数据精度高,影像的高重叠度使得其点位精度较常规数码航摄仪更高;③生产作业效率更高,A3最大可获取约62 000像素×8000像素的超宽幅影像图,同时地面处理系统对数据进行全自动化处理。A3航摄仪参数见表1。
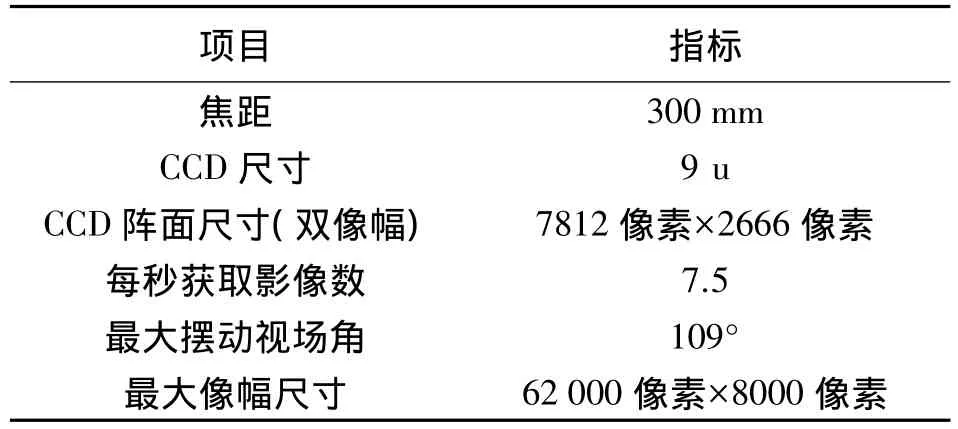
表1 A3相机参数表
三、试验概述
本次试验选取中国西南山区某地作为试验区,飞行区域内有平地、丘陵地和高山地,在该区域内,分别采用密周布点、稀疏密周布点、拐点加中间布点、拐点布点、无控制点方案共5种布点方案进行试验。
1.试验区域概况
该试验区位于经度 105°43'30″—106°03'01″,纬度 32°36'04″—32°41'52″,面积大约 300 km2。周边多山区,最高点海拔1370 m,最低点海拔530 m,高差800多米,地形较为复杂,具有一定的代表性。
2.航摄参数
本次试验采用A3航摄仪进行作业,航摄比例尺为1 ∶11 100,相对航高 3300 m,地面分辨率0.1 m,试验区内航线共有7条,航线间距1700 m,航线长27~29 km,航向重叠度58%~67%,旁向重叠度60%~65%,航拍影像用来制作1∶1000的数字正射影像DOM,飞行质量和影像质量良好,可以满足空三加密的要求。
3.影像数据空三处理分析
空三加密对最终的成图精度有很大影响,其原理是以一张像片组成的一束光线作为一个平差单元,以中心投影的共线方程作为平差的基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共光线实现最佳交会,将整体区域最佳地纳入到控制点坐标系中,从而确定加密点的地面坐标及像片的外方位元素。像点、摄站及待求物方地面点遵循以下共线方程式[4]

共线方程线性化后误差方程表示为

误差方程法方程为

空三精度方面,区域网平差的平面精度与周边的平面控制点密度及航带数有关,在区域网边缘有较密的平面控制时,其平面精度与区域网大小关系极小,同时与区域网内部平面控制关系也极小。区域网平差高程精度与高程控制航向跨度有关[5]。
A3地面处理系统Block Adjustment模块完成影像的同名像点匹配和光束法区域平差,由于A3系统旋转相机特殊的成像方式(框幅+扫描式),可获得高重叠度的影像,同一点在多达数十幅上有影像响应,可通过数十个多余观测(共线方程)获得解算,整个过程中,通过对像片间上百万个联接点的自动计算处理得到高精度的空三结果。
4.试验技术方案与精度分析
由于A3航摄仪跟常规的数码航摄仪在像幅面大小和成像方式上都有不同,考虑到试验区域地形复杂,为了最大限度地降低外业作业工作量,同时又保证达到成图精度要求,对试验区采用密周布设控制点,所有的控制点都为平高点。在能够野外布设控制点的情况下,航向每隔5 km布设一个点,旁向每隔5 km布设一点,整个区域共布设15个控制点,控制点分布如图1所示,本次试验像控点采用GPS RTK施测,布设像控点均按平高点要求进行布设。像控点距超宽幅影像边缘不应少于1.5 cm,像控点选在影像清晰的明显地物点、接近正交的线状地物交点、地物拐角点或固定的点状地物上,局部高程变化小且点位周围相对平坦[6]。

图1 控制点布设示意图
在整个数据处理过程中空三处理是保证精度的主要环节,对试验区影像处理的过程中,按照一定的分布规律逐渐减少控制点参与空三解算,控制点选取按照下面5种方案:①密周布点:所有15个外业控制点参加光束法平差;②稀疏密周布点:按照旁向每隔5 km、航向每隔10 km一个平高点,共选取9个平高点;③拐点加中间布点:选取四周4个拐点和中心点,共5个平高点;④拐点布点:只选取四角4个平高点[7];⑤无控制点:无控制点参与解算。对上述5种控制点布设方案,依次进行空三解算,空三处理后,地面定向点结果见表2。
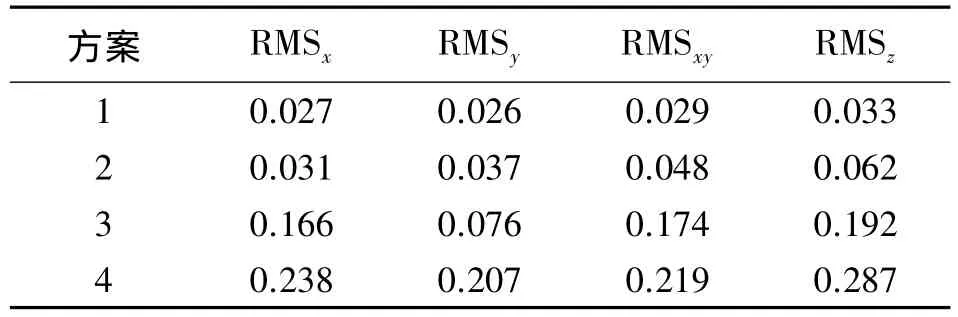
表2 光束法平差结果 m
表2中,RMSx为定向点北坐标x的中误差;RMSy为定向点东坐标y的中误差;RMSxy为定向点的平面中误差;RMSz为定向点的高程中误差[8]。无控制点的情况下空三结果通过检查点核算,对地面多余控制点进行检核计算,多余控制点精度见表3。

表3 检查点精度结果 m
表3中,Mx为检查点北坐标x的中误差;My为检查点东坐标y的中误差;Mxy为检查点的平面中误差;Mz为检查点的高程中误差[9]。根据地形图航空摄影测量内业规范可知,1∶1000山地空三地面定向点、多余控制点限差表见表4[10]。
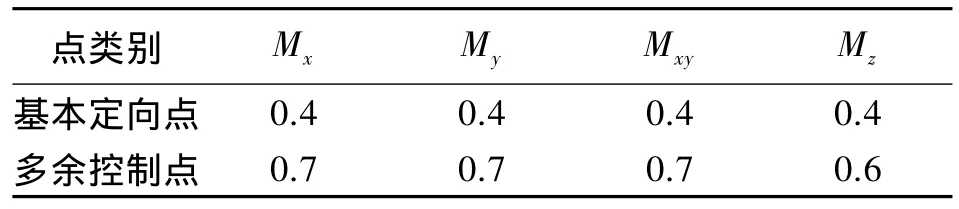
表4 1∶1000山地空三定向点、多余控制点限差表m
通过比较表2、表3和表4可知:密周布点法、稀疏密周布点法、拐点加中间布点、拐点布点、无控制点布设这5种控制点布设方案都能够满足精度限差要求。密周布点法和稀疏密周布点解算精度很理想;拐点加中间布点和拐点布点解算中误差明显加大;由地面检查点结果可知,无控制点布设情况下解算结果检查点中误差最大。总体来看,随着像控点之间间隔距离的增加,参与解算像控点减少,定向点和检查点的点位中误差和高程中误差呈增大的趋势。
四、结 论
综合试验生产工作量情况和各项成果的精度可得出以下结论:
1)采用A3航摄仪进行山地区域航空摄影作业时,在控制点布设方案的选择中,如果作业范围较小可以选择无控制点方案。但是范围较大的情况下,为了保证空三结果精度更优,选择拐点加中间布点方案,在4个拐点与中心位置各布设一个控制点对整个区域进行控制,这样整体空三的精度更可靠。
2)对于大范围测区,建议按照稀疏密周布点布设方案,如果条件允许,5~10 km布设一个平高点,对于困难区域,可适当放宽一点。
3)由于A3航摄仪的特殊作业方式,本次试验中无控制点空三解算后,精度可以达到要求,但是对于常规框幅式及推扫式数码航摄仪无控制点布设方案的可行性,还需进一步试验。
[1]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.
[2]何文林,郭文.航空摄影测量像片控制点布设方案研究[J].四川测绘,2003,26(1):43-48.
[3]祝晓坤,张海涛,董明.基于数理统计分析的数字摄影资料空三布点方案选择[J].北京测绘,2006(4):1-5.
[4]张剑清,潘励,王树根.摄影测量学[M].2版.武汉:武汉大学出版社,2009.
[5]吴巧玲.大比例尺数码影像航测像控布点方案探讨[J].测绘通报,2009(5):35-37.
[6]安金玉,方源敏.基于DMC-Ⅱ数码航空摄影测量区域网布设研究[J].价值工程,2013(31):219-221.
[7]朱士才,羌树华,邹学忠,等.数码航摄(DMC)像控布设方案研究[J].现代测绘,2008,31(6):9-10.
[8]朱陈明,赵力彬,李庆东.基于DMC数码影像的数字摄影测量精度探讨[J].测绘标准化,2010,26(3):19-22.
[9]赵云昌,丁莹莹.SWDC数码航摄区域网控制点布设的精度试验[J].山东国土资源,2009(12):31-33.
[10]国家测绘局.GB 7930—87 1 ∶500、1 ∶1000、1 ∶2000地形图航空摄影测量内业规范[S].北京:中国标准出版社,1987.