双余度机电静压伺服机构的故障隔离与重构技术研究
2015-12-08赵守军
赵 春,赵守军,何 俊,陈 鹏,曲 颖
(北京精密机电控制设备研究所,北京100076)
·工程技术·
双余度机电静压伺服机构的故障隔离与重构技术研究
赵 春,赵守军,何 俊,陈 鹏,曲 颖
(北京精密机电控制设备研究所,北京100076)
针对高可靠应用需求,介绍一型双余度机电静压伺服机构试验样机,采用一台非对称式液压作动器及与其集成于一体的两套伺服电机泵驱动组件。重点分析了余度机电静压伺服机构故障隔离和重构技术方案,采用含M型工位的两位四通电磁换向阀实现故障通道的隔离与卸荷,提出故障工况下将剩余正常通道的位置误差比例增益加倍的控制律重构方法。理论分析和故障模拟试验数据表明,双余度机电静压伺服机构具备突出的可靠性设计优势和良好的故障容错能力,具有应用于载人航天运载火箭的价值。
机电静压;双余度;故障隔离;重构;运载火箭
1 引言
机电静压伺服机构(Electro-Hydrostatic Actuator,EHA,也称电静液伺服作动器)通过伺服电机驱动双向定量泵实现液压作动器两腔流量的精确快速调节,最终通过负反馈闭环控制实现作动器活塞位置的精确快速控制。相比传统的阀控电液伺服机构(Electro-Hydraulic Actuator,EH),消除了伺服阀前置级喷嘴抗污染能力差、易于堵塞的致命故障模式;相比滚珠丝杠类机电伺服机构(Electro-Mechanical Actuator,EMA),消除了机械传动机构的卡死故障模式,保留了电力驱动的使用维护方便性和高效率,同时继承了液压作动器的强大输出力能力[1-4]。三者原理对比如图1。
因此,机电静压伺服机构以其较高的固有可靠性、良好的使用维护性和易实现大功率等特点,成为飞机功率电传(Power-By-Wire)舵控作动系统的主选方案[5,6],已在欧洲空中客车A380和美国联合战斗机F35等飞机上成功应用[6,7],也成为我国航空领域近年来研究和攻关的重点[8]。在航天领域,此技术对载人运载火箭也有很强的吸引力。

图1 三种伺服机构工作原理比较图Fig.1 The comparison of three servo actuators’schematic diagrams
对于机电静压伺服机构,定量泵中高速精密运动副密集,与伺服电机及配套的电子控制驱动部分一起是可靠性相对薄弱的环节,但由于是液压控制,很容易通过多台液压泵的并联冗余设计得到解决[1,9]。此外,多台液压泵并联也可以增大功率输出能力。载人航天追求极致的可靠性指标,摇摆发动机实现推力矢量控制的伺服机构功率也较大,采取冗余设计的机电静压伺服机构提供了较理想的技术方案[3],但系统相对复杂,在国内研究很少。
对应用于航天的伺服机构,因受空间布局限制,液压作动器不能采取航空中通常用到的作动器活塞串联冗余设计方式[4],只能在可靠性薄弱的核心部件采取冗余设计,但要求能够自动消除一度故障影响,即“一度故障容错能力”(One Fault Tolerant),也因此在航天伺服控制中称作“余度设计”。例如,三余度阀控伺服机构的伺服阀即采用三套力矩马达和液压放大器前置级,通过阀芯位置和伺服作动器输出位置的两级闭环反馈自动消除一度故障影响[9]。
因此,故障隔离与重构成为高可靠机电静压伺服机构的关键技术。本文设计了双余度机电静压伺服机构试验样机,提出了故障隔离与重构方案,进行了模拟故障工况下的系统初步性能试验,表明双余度机电静压伺服机构具备突出的可靠性设计优势和良好的故障容错能力。
2 试验样机设计方案及工作原理
设计双余度机电静压伺服机构及其控制驱动器试验样机,工作原理简图如图2[10],机电静压伺服机构如图3,控制驱动原理图如图4[11],高度集成的一体化伺服电机泵如图5,基本设计参数如表1。
将柱塞式定量液压泵、永磁同步式伺服电机和旋转变压器同轴集成设计在一个壳体内,形成一个产品,称为伺服电机泵(Servo Motor Driven Pump,SMDP),在控制上与伺服电机相同,但输出的是液压流量而不是机械转角。采用两套相同的伺服电机泵及控制驱动装置,形成液压作动器的两个控制通道,此处称作通道A和通道B。每个通道输出液压流量的隔离控制由液压泵出口的含M型工位的两位四通电磁换向阀实现。
采用非对称的单出杆液压作动器设计,以适应现有试验系统较短轴向安装尺寸限制,但在无杆腔内部中心增加一个固定套筒,使得两腔作用面积比接近1,近似于对称作动器,以减小油箱体积。内置测量作动器活塞位移的传感器,一端固定在套筒内,一端连接在移动的活塞杆上。两个不同方向运动时的不对称流量由增压油箱和液控单向阀调节:当活塞由小端朝大端运动时,液控单向阀打开,大端排出的相对于小端的多余油液通过单向阀进入油箱;相反方向运动时,液控单向阀关闭,电机泵速度增加,增压油箱补充大端运动需要的较多油液。增压油箱也防止液压泵的气蚀及补偿系统内泄漏。
电气部分采用控制器和驱动器一体化设计方案。控制器的核心是数字信号处理器(Digital Signal Processor,DSP),实现作动器位置环、电机速度环和电流环的三环闭环控制及系统性能补偿计算;同时,实现永磁同步电机的正弦波调制控制,生成控制伺服电机的PWM信号。电机驱动器的核心是IGBT模块及功率驱动电路。伺服控制驱动器与外部采用CAN总线通讯。两个电气通道之间采用422内部总线通讯。
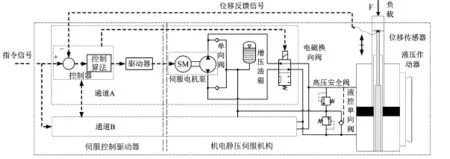
图2 双余度机电静压伺服机构工作原理简图Fig.2 The schematic diagram of the dual redundancy EHA

图3 伺服控制驱动器A通道工作原理简图Fig.3 The schematic diagram of the servo controller and driver of the channel A
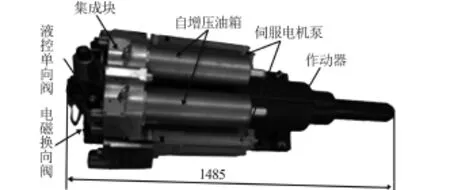
图4 双余度机电静压伺服机构图Fig.4 The picture of the dual redundancy EHA
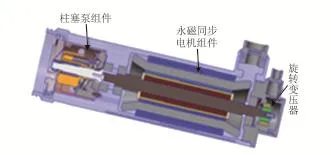
图5 伺服电机泵设计图Fig.5 The cross section of the servo motor driven pump

表1 双余度机电静压伺服机构基本设计参数表Table 1 The basic design parameters of the dual redundancy EHA
为消除作为核心部件的伺服电机泵及其电控部分的一度故障影响,系统采用如下的故障隔离与重构方法:
1)正常工况下,通道A和通道B同时工作,两个伺服电机泵各承担作动器控制流量的1/2;
2)假设通道A故障,包含驱动器、伺服电机和液压泵等可能的故障,电磁换向阀断电,切断液压泵与作动器的液流通道,利用电磁换向阀的M型工位实现液压泵的卸荷;
3)在电磁换向阀动作的同时,发信号给通道B,通道B的控制器改变控制律,将伺服电机泵的转速提高一倍,保持液压作动器位置闭环控制的性能不变,即实现一度故障容错能力。
3 控制律重构方法分析
控制律重构是余度机电静压伺服机构实现“一度故障容错能力”的关键,由软件实现。
因配置及其设计参数完全相同,忽略A、B两个通道的差异,系统控制方框图简化表达如图6。
位置回路的开环特性表达为:

其中,为方便表达,将位置闭环控制算法拆解为两部分,即位置误差比例增益Kp和表达为集中控制传递函数的位置特性补偿算法Gb。将伺服电机动态特性表达为Gsm,作动器在负载下的动态特性表达为GL。此外,Dp是液压泵的排量,A是液压作动器的作用面积,Kn是等效的电机转速系数,Kx是位移传感器变换系数,均是常数,s则是拉普拉斯算子。
一个通道故障工况下,如果另外一个通道控制律不变,位置回路的开环增益则会降低一半,动态品质将显著变差。要保证系统的原有品质,剩余一个通道的增益必须要增大。控制律重构设计如下:一个通道故障时,剩余的正常通道将位置误差比例增益加倍,由Kp增大至2Kp。从而保证系统特性不变。
可以看出,余度机电静压伺服机构的控制律重构技术途径简单明了,只需改变位置回路的位置误差比例增益,而对位置回路的其它特性补偿算法、伺服电机回路的的控制算法不需要采取任何措施,这充分显示出机电静压伺服机构的余度设计优势。

图6 系统控制方框简图Fig.6 The block diagram of the control system
4 仿真分析及试验验证
搭建双余度机电静压伺服机构的AMESim仿真模型[10],简要表达如图7。
以试验样机为试验对象,搭建试验系统,利用阀控液压作动器加载,进行故障隔离与重构模拟试验,试验现场如图8。
为对比系统隔离与重构前后的性能差异,设计试验程序如下:
1)0 s起,通道A和通道B同时工作;
2)40 s时刻,模拟通道B故障,切换通道B的电磁换向阀,同时通道A位置误差比例增益加倍;
3)80 s时刻,模拟通道B恢复,通道A和通道B同时工作;
4)120 s时刻,模拟通道A故障,切换通道A的电磁换向阀,同时通道B位置误差比例增益加倍;
5)160 s时刻,模拟通道A恢复,通道A和通道B同时工作。
整个过程中,对作动器施加的位置信号为:

施加外负载力为:

截取40 s时模拟通道B故障时刻前后以及80 s时模拟通道B恢复工作时刻前后的位置、电机转速、电机电流和作动器两腔压差的仿真与实测试验曲线如图9~图12(通道A故障工况及恢复的曲线近似,不再给出)。
分析故障工况下的伺服机构对指令信号的频域响应如表2[12]。

图7 双余度机电静压伺服机构AMESim仿真模型Fig.7 The AMESim simulation model of the dual redundancy EHA

图8 双余度机电静压伺服机构试验系统Fig.8 The experiment system for the dual redundancy EHA

图9 作动器位置响应的仿真与实测试验曲线Fig.9 The simulation and experiment curves of the actuator’s position responses

表2 位置响应曲线频域分析结果Table 2 The frequency domain analysis result of the position responses
试验数据分析表明:
1)系统的试验曲线与仿真结果吻合,作动器在正常和故障工况下均能有效抵抗外负载干扰,稳定跟随指令信号动作;
2)一个通道故障时,剩余的正常通道的电机泵转速加倍,输出流量也因此加倍,作动器的控制流量能力不变,位置回路的幅频和相频特性保持了原有品质;
3)系统还具备故障通道的快速恢复能力,两个通道电机泵快速协同工作,位置控制特性不受影响。
分析认为,不同通道下的少许性能差异源于伺服电机泵的内泄漏等个性。通道A单独工作时,幅值比-0.26 dB稍优于双通道的-0.38 dB,相位滞后-55.4°也稍优于双通道的-59.3°。通道B单独工作时,性能与双泵相当。
因此,系统具备良好的一度故障容错能力。
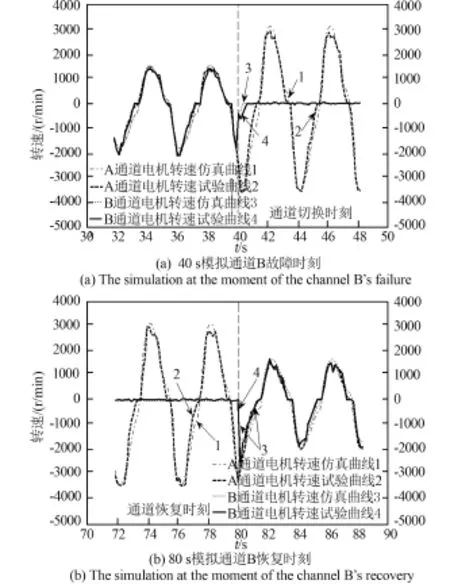
图10 电机转速仿真与实测试验曲线Fig.10 The simulation and experiment curves of the motors’rotation speeds

图11 电机q轴电流仿真与实测试验曲线Fig.11 The simulation and experiment curves of the motors’q-axis currents

图12 作动器两腔压差仿真与实测试验曲线Fig.12 The simulation and experiment curves of the differential pressure for the actuator
5 结论
针对双余度机电静压伺服机构初步研究成果,总结如下:
1)液压泵的流量输出相加特性使得机电静压伺服机构可以方便实现更高等级的余度设计,例如三余度或四余度,只需在液压泵出口设置换向阀实现彼此的隔离。而对于采用滚珠丝杠传动和齿轮减速器的机电伺服机构,由于要通过齿轮机构实现故障隔离与协调,更复杂,技术难度也更大。
2)机电静压伺服机构余度设计优势还在于可方便实现大载荷和大功率输出能力。本文中的样机采用液压作动器可以可靠实现300 kN的推力和近10 kW的功率输出。其中,伺服电机泵虽然是新产品,但在部组件层级有良好的航天产品基础,进一步改进可以可靠实现6000 rpm的转速和21 MPa的负载压力,单套对应功率可达到15 kW,单个液压作动器配四套电机泵就可实现60 kW的功率输出。相反,要开发60 kW的航天用伺服电机或液压泵,难度和技术风险都很大。
3)对于我国未来更大推力的载人运载火箭需要的典型40 kW伺服功率而言,采用四余度设计可实现一度故障工况下的全功率能力、两度故障工况下的75%功率能力、三度故障工况下的37.5%的功率能力。由于航天伺服控制的瞬时大功率、经常性小功率功率谱特点以及伺服电机和液压系统较强的短时过载能力,余度机电静压伺服机构具备值得信赖的故障容错能力。
4)相比传统的阀控液压伺服机构,机电静压伺服机构也具有结构一体化设计的先天优势,可彻底消除独立的液压能源系统和外部液压导管,密封可靠性显著提高,使用维护方便性与机电伺服机构接近。
5)本文开展的余度机电静压伺服机构研究还在于初期阶段,试验样机系统频带还很窄,结构设计还不够紧凑。国内较大功率的快响应机电静压伺服机构也有研究成果[13],且液压产品具备高集成结构设计的天然优势,都有解决的工程基础。
6 结束语
作为近年来国外航空领域已取得充分发展的先进技术,机电静压伺服机构(EHA)因其电力驱动、高可靠设计、大功率等特点,对我国载人航天运载火箭有较大的应用价值。本文通过双余度机电静压伺服机构原理性样机设计和试验研究,提出了故障隔离及重构方法,表明系统具备良好的一度故障容错性能,同样技术可拓展应用至更高余度等级的设计。
(
)
[1]Garrison M,Davis M,Steffan S.Human-rated upper stage thrust vector control system architecture selection[C]//43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference&Exhibit.July,2007:Cincinnati,OH.
[2]Vanthuyne T.An electrical thrust vector control system for the VEGA launcher[C]//Proceedings of 13th European Space Mechanisms and Tribology Symposium-ESMATS 2009’,Vienna,Austria 23-25 September 2009.
[3]曾广商,赵守军,张晓莎.我国载人运载火箭伺服机构技术发展分析[J].载人航天,2013,19(4):3-10.Zeng Guangshang,Zhao Shoujun,Zhang Xiaosha.Technology development analysis of Chinese servo-mechanism for human-rated launch vehicles[J].Manned Spaceflight,2013,19 (4):3-10.(in Chinese)
[4]McCullough K R.Design and Characterization of a Dual Electro-Hydrostatic Actuator[D].Hamilton:McMaster University,2011.
[5]Navarro R.Performance of an electro-hydrostatic actuator on the F-18 systems research aircraft[R].NASA/TM-97-206224,1997.
[6]Cooper M A.Simulating Actuator Energy Demands of an Aircraft in Flight[D].Cranfield:Cranfield University,2014.
[7]Le Tron X.A380 Flight Controls Overview.DGLR.[2012].http://www.fzt.haw-hamburg.de/pers/Scholz/dglr/hh/text_2007_09_27_A380_Flight_Controls.pdf
[8]李军,付永领,王占林.机载电静液作动系统的发展 现状与关键技术研究[J].航空制造技术,2005(11):73-77.Li Jun,Fu Yongling,Wang Zhanlin.Present development status and key technology research of airborne electro-hydrostatic actuation system[J].Aeronautical Manufacturing Technology,2005(11):73-77.(in Chinese)
[9]曾广商,沈为国,石立,等.高可靠三冗余伺服机构系统[J].航天控制,2005,23(1):35-40.Zeng Guangshang,Shen Weiguo,Shi Li,et al.High-reliable triple redundancy servomechanism system[J].Aerospace Control,2005,23(1):35-40.(in Chinese)
[10]齐海涛,付永领.基于AMESim的电动静液作动器的仿真分析[J].机床与液压,2007,35(3):184-186.Qi Haitao,Fu Yongling.Simulation of electro-hydrostatic actuator based on AMESim[J].Machne Tool&Hydraulics,2007,35(3):184-186.(in Chinese)
[11]陈恒.基于DSP的永磁同步电机控制系统的研究[D].南京:南京理工大学,2010.Chen Heng.Research of permanent magnet synchronous motor control system based on DSP[D].NanJing:Nanjing University of Science and Technology,2010.(in Chinese)
[12]赵守军,许文波.基于虚拟测试的伺服系统频率特性Matlab求解方法和应用[C]//第五届全国流体传动与控制学术会议暨2008年中国航空学会液压与气动学术会议,2008.Zhao Shoujun,Xu Wenbo.Virtual-testing-based Matlab Solution to frequency characteristics of servo systems and its applications[C]//The 5th Nation Academic Conference on Fluid Power Transmission and Control&China Aviation Society Hydraulic and Pneumatic Conference,2008.(in Chinese)
[13]何俊,赵守军,曲颖,等.一种高紧凑整体化机电静压伺服机构研究[C]//中国航空学会航空机电、人体与环境工程学术会议,2013.He Jun,Zhao Shoujun,Qu Ying,et al.Study on a high compact and integrated electro-hydrostatic actuator[C]//2013 Conference on Aviation Electromechanical,Human and Environmental Engineering,China Society of Aeronautics and Aerospace,2013.(in Chinese)
Study on Fault Isolation and Reconfiguration for Dual Redundancy Electro-Hydrostatic Actuators
ZHAO Chun,ZHAO Shoujun,HE Jun,CHEN Peng,QU Ying
(Beijing Institute of Precision Mechatronics and Controls,Beijing 100076,China)
For highly reliable applications,a dual redundancy electro-hydrostatic actuator(EHA) was introduced,where a non-symmetrical hydraulic actuator and two sets of servo motor driven pump were integrated into a monolithic structure.A technical approach to isolate faults and reconfigurate the system was introduced and analyzed.Two-position-four-way directional solenoid valves having M type positions were used to isolate the fault channel and to unload the corresponding pump.A control law was reconstructed that the position error gain in the remaining normal channel was doubled.Theoretical analysis and experimental simulations were conducted.It shows that redundant Electro-Hydrostatic Actuators have the outstanding advantage for highly reliable designs and good fault tolerant performance,valuable to be applied to manned space launch vehicles.
electro-hydrostatic actuator;dual-redundant;fault isolation;reconfiguration;launch vehicle
V448.122
A
1674-5825(2015)03-0205-07
2015-03-17;
2015-04-14
赵春(1988-),男,硕士研究生,研究方向为运载火箭推力矢量伺服控制技术。E-mail:zhao.c1988@163.com