调制反射激光通信系统及关键技术
2015-12-07王霞张立中孟立新
王霞,张立中,2,孟立新,2
(1.长春理工大学 机电工程学院,长春 130022;2.长春理工大学 空地激光通信国防重点学科实验室,长春 130022)
自由空间激光通信(FSO,Free Space Optical Communication)具有通信速率快、通信容量大等优点,被广泛应用于各领域。传统FSO链路的两端都需要配置收发机,体积、重量、功耗较大,限制了FSO的应用。从信息不对称和承载能力不对称两个方面考虑,研究轻小型、低功耗非对称激光通信链路具有重要意义。逆向调制式激光通信系统(MRR FSO)免去了链路一端的收发机及捕获、对准、跟踪系统,具有体积小,重量轻,功耗低等特点[3],有效的解决了传统FSO的应用限制,其应用越来越受到重视,成为空间激光通信中的一种必然发展趋势。本文将对调制反射激光通信系统的组成和原理进行分析,对光学系统和调制系统的类型进行比较,最后获得较为合适的总体方案。
1 调制反射激光通信系统
1.1 系统组成
图1所示为调制反射激光通信系统示意图。系统主要包括两部分,一部分为光收发机,其中包括发射天线、接收天线和解调单元等,光收发机主要用于询问光发射以及调制光接收、探测和处理,是链路的主机;另一部分为调制反射系统,包括光学系统和光调制器两部分,光调制器用于实现空间光调制,光学系统可使光束按原路返回,从而与光收发机构成通信光闭环系统,同时也能够为光收发机跟踪系统提供目标光源。
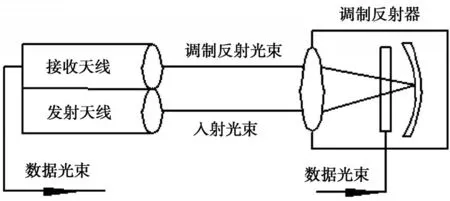
图1 调制反射激光通信系统示意图
1.2 系统工作原理
图2所示为调制反射激光通信系统原理图。光收发机的发射天线发射询问光束至调制反射系统,MRR探测到询问光束时,信号处理系统将会驱动光调制器对询问光束进行数据加载,实现询问光束的调制,然后调制后的数据光束经光学系统反射回光收发机的接收器,接收器将获取的数据信号发送到信号处理系统,对信号进行处理[1]。

图2 系统原理图
1.3 调制反射激光通信系统特点
系统只有一个光收发机,为半双工工作模式,适合于非对称信息传输[4],图3是美国海军研究院卫星-地面下行通信链路示意图;系统更轻、功耗更小,使用更加灵活[2];通信时光束经过两次信道,信道影响较常规激光通信要恶劣。

图3 美国卫星-地面下行通信链路示意图
2 调制反射系统
调制反射器(MRR)是调制反射激光通信系统的核心,MRR系统包括光学系统和光调制器。光学系统可使询问光束按原路返回,光调制器用于实现空间光调制,从而与光收发机构成通信光闭环系统。
2.1 光学系统
目前用于MRR的光学系统有角反射镜和猫眼系统。
2.1.1 角反射镜
图4所示为角反射镜工作原理。角反射镜为三面直角棱镜,可反射各种到达棱镜面的光线或光束,无论光线从哪个方向射入,它都能将入射光线逆原方向反射回去。

图4 角反射镜工作原理
图5所示为采用角反射镜时调制反射链路示意图。基于角反射镜可将入射光原路返回的特性,将光调制器放置在角反射镜的一个面上,实现对入射光的调制后,通过角反射镜将调制后的数据光束反射回光收发机,从而达到信息传输的目的。

图5 角反射镜的调制反射链路示意图
2.1.2 猫眼系统
如图6所示,猫眼系统由透镜和光敏面组成,入射光经透镜到达光敏面,光束经光敏面反射按原路返回。猫眼效应反射光具有原路返回特性和准直特性,且原路返回特性不受入射光影响,同时猫眼效应反射光强度比一般漫反射强度高2~4个量级。

图6 猫眼系统
图7所示为采用猫眼系统时调制反射通信链路示意图,将调制器放置在猫眼系统焦平面处的光敏面上,入射光束经猫眼到达调制器,对光束进行数据加载后,由光敏面将数据光束按原路反射回光收发机,实现链路通信。

图7 猫眼系统的调制反射链路示意图
2.1.3 角反射镜和猫眼系统的比较
角反射镜简单方便且制造费用较低,但采用角反射镜作为MRR的光学系统时,要求光调制器的尺寸较大以匹配角反射镜的口径,而调制器的尺寸越大调制速率越低,这就出现了光学系统口径与调制速率之间的矛盾[8]。采用猫眼系统时,因为调制器放在猫眼系统的焦平面处,焦平面处光束汇聚,所需调制器的尺寸较小,因此可以获得较高的调制速率。另外,若将调制器分割成若干像素块,由于光束汇聚,同一时间内只需对调制器的一部分进行驱动,能大大降低功率消耗[5]。但猫眼系统相对于角反射镜制造费用较高。
2.2 光调制器
用于MRR的光调制器主要有多量子阱(MQW)调制器、微机电系统(MEMS)调制器、液晶调制器、相位调制器等,不同的调制器调制特性也有所不同。
2.2.1 多量子阱调制器
多量子阱(MQW)调制器最早由美国海军研究实验室NRL(Navy Research Laboratory)提出,多量子阱调制器包括一个N型InP底,一个1.3微米厚的固定InGaAs/InAlAs材料的耦合多量子阱层,由高掺杂P型InGaAs薄层覆盖的P型InAlAs顶[7]。工作波长由多量子阱层确定,涵盖的波段约为1550nm。图8所示为集成光电接收器的MRR MQW。

图8 集成光电接收器的MRR MQW
NRL于2000年在小型旋翼无人机上安装了口径5mm的MQW MRR,实现通信速率400Kbps~2Mbps,通信距离35~65m的原理试验。于2006年开展了采用猫眼镜头的长距离通信研究,实现通信距离7km,通信速率45Mbps的激光通信试验[6]。NRL和美国国家航空航天局(NASA)联合开展了空间用调制反射镜阵列MODRAS(Modulating Retro-reflector Array in Space)试验,试验设计指标为通信速率12Mbps,卫星轨道高度400km,通信波长为1064nm。图9所示为美国NASA母星与小卫星间通信示意图。

图9 美国NASA母星与小卫星间通信示意图
2.2.2 微机电系统
MEMS回复调制器是采用微机械变形镜或衍射光栅结构,通信范围为0.1~10km,采用变形镜的MEMS的远程调制速率达100kHz,采用衍射光栅结构MEMS调制器最高调制速度可达1Mbps,然而此时需要λ/4的机械挠度,且调制器的波长和角度需要匹配,因此可用视场通常只有6°或更小。MEMS调制器较MQW调制器速度要低很多,但是制造费用和对环境敏感程度较MQW调制器也低很多。图10为Trevor K Chan和Joseph E Ford提出的MEMS回复调制器示意图。
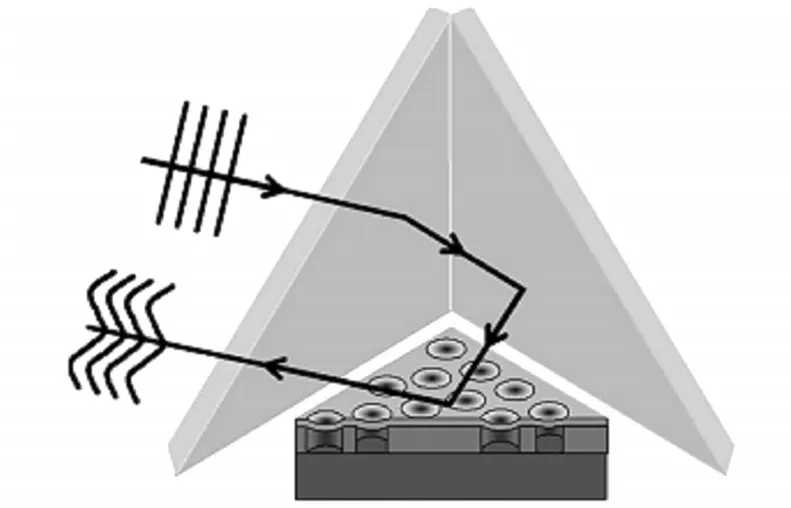
图10 Trevor K Chan和Joseph E Ford提出的MEMS回复调制器示意图
2.2.3 铁电液晶调制器
图11所示为铁电液晶寻址光调制器的示意图。液晶材料的光学性质可通过电场而改变,铁电液晶的响应速度可达微秒量级,因此作为光调制层,液晶材料被广泛应用,铁电液晶空间光调制器具有响应快、开关功耗低以及双稳态开关特性等优点,但其调制速率只能达到几十kHz。
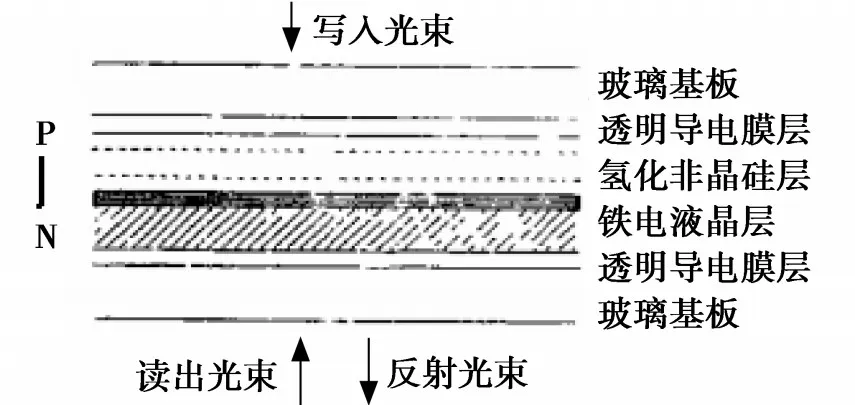
图11 铁电液晶寻址光调制器示意图
3 应用展望
由于MQW具有较高的调制速率,而猫眼能够解决光学系统和光调制器的矛盾,所以猫眼和MQW组成的MRR系统成为MRR FSO技术的主要研究方向。图12所示为猫眼多量子阱MRR。基于调制反射激光通信系统的结构特点,该通信链路可广泛应用于无人机、飞机、侦察车、卫星、水下通信链路等对载重、功耗和体积等有限制的通信链路,配合射频通信实现安全可靠信息传输,应用前景广阔,对未来激光通信的发展具有重要的意义。

图12 猫眼多量子阱MRR
[1]张来线,孙华燕.猫眼逆向调制自由空间激光通信技术的研究进展[J].中国光学,2013,6(5):681-691.
[2]丁德强,柯熙政.非对称回复反射自由空间光通信链路性能[J].应用科学学报,2010,28(4):337-341.
[3]MahaAchour.Free-spaceopticalcommunication by retro-modulation:concept,technologies and challenges[J].Proc.of SPIE,2004,56(14):52-63.
[4]Mark plett,William S.Rabinovich,etc.Free-space opticalcommunication link across 16 kilometers over the Chesapeake Bay to a modulated retroreflector array[J].Optical Engineering,2008,47(4):1-10.
[5]William S,Rabinovich Peter G,Goetz Rita Mahon,et al.45-Mbit/s cat’s-eye modulating retro-reflectors[J].Optical Engineering,2007,46(10):1-11.
[6]Rabinovich W S,Mahon R.45 Mbps cat’s eye modulating retro-reflector link over 7 Km[J].Proc.of SPIE,2206,63(4):1-11.
[7]王健华,金峰,俞谦,等.InGaAs/InAlAs多量子阱电吸收光调制器[J].半导体学报,1998,19(1):43-49.
[8]孙华燕,张来线.逆向调制自由空间激光通信技术研究进展[J].激光与光电子学进展,2013,50(4):1-9.
