一种有效提高CE-1卫星卸载前后精密星历衔接精度的定轨策略*
2015-12-05段建锋曹建峰段成林
段建锋 曹建峰,2 张 宇 陈 明,2 王 健 段成林
1. 北京航天飞行控制中心,北京100094
2.航天飞行动力学技术重点实验室,北京100094
人类对月球的探测活动从20 世纪50年代末开始至今,已有半个多世纪的历程,取得了巨大的成就[1]。美国、俄罗斯与欧洲在该领域走在世界的前列,先后共有12 名宇航员登上了月球,获得了大量的科学信息,深化了人类对月球、地球和太阳系的认识,同时发展了完备的深空航天器测量技术及航天器定轨定位技术[2]。此外,日本在该领域的发展也达到相当的水平[3]。我国的科研人员对探月相关问题也进行了自己的研究[4-5],并在21 世纪初提出了符合我国国情的探月计划:整个计划可分为绕月飞行、月面软着陆和采样返回3个阶段。嫦娥一号卫星任务实现了第一阶段,即绕月探测的任务。
嫦娥一号卫星由运载火箭“长征三号甲”在2007年10月24日成功发射并准确入轨。经3 次近月制动控制后,于2007年11月7日进入了平均高度200km、周期127min 的工作圆极轨道,也称为使命轨道。
由于嫦娥一号卫星自主飞行过程中的姿态保持采用动量轮控制[6-7]的方式,嫦娥一号卫星在调相轨道段、地月转移轨道段动量累积较少,动量轮卸载主要安排在轨控前,并尽量与调姿过程相结合。在环月飞行阶段,嫦娥一号卫星建立三轴定向姿态模式,受月球重力梯度不均的影响,其动量矩会增加,为了防止动量矩对嫦娥一号卫星姿态的影响,使用安装在嫦娥一号卫星内部的动量轮吸收卫星的动量矩增量,但当扰动力矩累积到一定程度时,动量轮转速会达到饱和,这时需要通过喷气对动量轮进行卸载,把飞轮中的动量矩卸到系统外部。嫦娥一号卫星环月工作段一般1 ~2d 会卸载一次[8-9]。由于卸载喷气时会对卫星本体产生附加的加速度,动量轮卸载对卫星的轨道有明显的影响。喷气卸载过程中嫦娥一号卫星上的各种科学载荷都在运转,各项科学试验也在进行。为了后续各项科学试验得出准确的分析结果,有必要得到包括喷气卸载过程在内的卫星精密星历。
动量轮卸载过程复杂,很难用简单模型模制其产生的附加加速度。如何提高动量轮卸载情况下的轨道确定精度是定轨中的一个重要问题。目前正常的策略是对其进行截断计算,但星历衔接段的精度得不到满足,甚至出现km 量级的误差,本文通过对卫星发动机喷气卸载进行分析,建立常值动力学模型[10],继而分析其对卫星轨道的影响,可以得出卸载对卫星轨道及卫星卸载前后精密星历的精度都有影响,通过对不同轨道计算策略的对比分析,得出一种可以有效提高卸载前后精密星历衔接段精度的轨道计算策略。
1 喷气卸载模型
卫星环月段总的加速度可描述为:

其中,r 为卫星的位置矢量;am为月球产生的质点引力加速度;ase为太阳及地球产生的质点引力加速度;ans为由月球引力位的非球形部分产生的非球形引力加速度;asr为由太阳辐射压产生的加速度;atac为由卫星姿态控制系统调整过程引起的加速度;at为由卫星发动机推力产生的加速度;awol为由卫星动量轮卸载引起的加速度;还有其它的加速度如由相对论引起的加速度、由天体潮汐引起的加速度等,这里统称为。
对于嫦娥一号卫星测控过程,卫星动量轮卸载是通过喷气调姿实现的,在其它摄动加速度都已知的情况下,本文主要讨论awol。
在通常情况下,由于嫦娥一号卫星的动量轮喷气卸载持续时间比较短,因而可假定awol等效为轨道坐标系下x,y,z 方向上的常值作用力模型,因此有:

其中,ax0,ay0,az0为常值,可作为已知量使用,或者作为动力学方程中的待估参数求解。而卸载作用时间为卸载持续时间。
卸载的相关信息如卸载时间点及卸载持续时间包含在卫星的遥测参数中,因此卸载的作用力可由遥测参数进行估算,该估算值可作为卸载作用力参数估值的初值使用;若无该信息(如测控区外卸载情形),则可设置其初值为0,再进行解算[12]。
2 卸载对CE-1 卫星轨道影响分析
在嫦娥一号卫星进入绕月工作轨道后,卫星的卸载较为频繁。表1 中给出了进入使命轨道后一周的卸载信息,包括卸载时刻及卸载时长。
可以通过卸载前后位置速度的偏差来分析嫦娥一号卫星卸载对轨道的影响。以表1 中第1 段及第2 段卸载为例,分别考虑两段卸载进行定轨获得的星历)作为其基准星历,同时以卸载前的数据定轨直接外推得到的星历)作为比较星历,两段星历分别进行差分得到星历偏差量),再转换到RTN 方向,结果如图1 和2 所示。

表1 嫦娥一号卫星环月段一周卸载信息
从图中可以看出在卸载时刻之后δR 的沿迹方向(T)上存在发散现象,预报12h 后位置误差在T方向有100m 量级,而在卸载之前两段星历的位置误差T 方向约在50m 量级内,卸载时刻后δV 在径向(R)存在发散情况,预报12h 后速度误差在R 方向有10cm/s 量级,而在卸载前该误差为1cm/s 量级。此图也说明卸载对卫星轨道即卫星精密星历有较大影响,并且该影响主要是在卫星位置的沿迹(T)方向及速度的径向。

图1 2007年11月10日卸载引起的位置速度变化
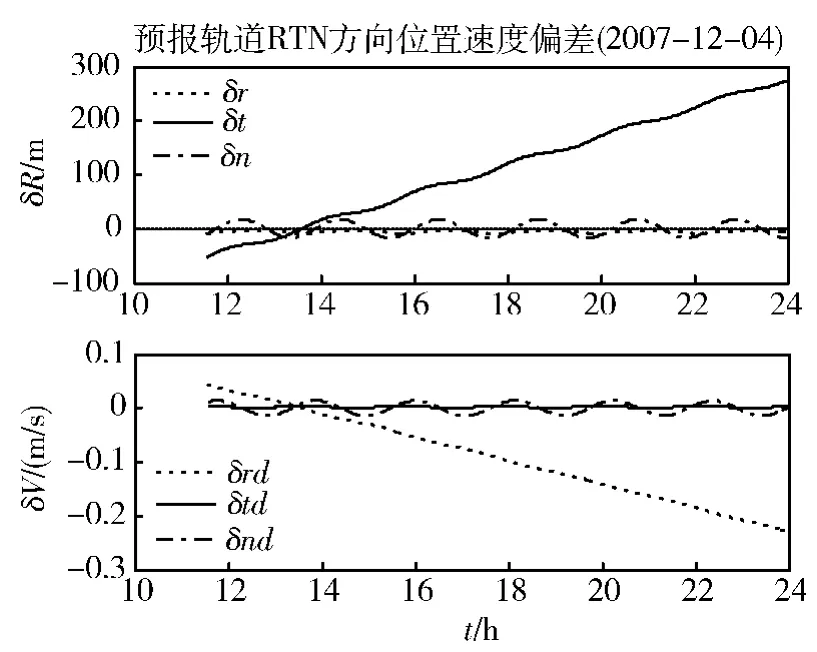
图2 2007年12月04日卸载引起的位置速度变化
3 解算策略及定轨分析
3.1 解算策略分析
为了提高卸载前后定轨精度,在轨道改进过程中需要考虑卸载带来的影响。一种有效的处理方法是在轨道改进过程中解算卸载的等效加速度。不同的定轨策略直接影响到定轨结果,有必要对定轨策略的有效性进行分析,以得到嫦娥一号卫星环月期间的精密星历。
本文采用的定轨软件为北京航天飞行控制中心自行开发研制的探月卫星定轨软件ODB。一般情况下,环月轨道段定轨基本策略设置如表2 所示。
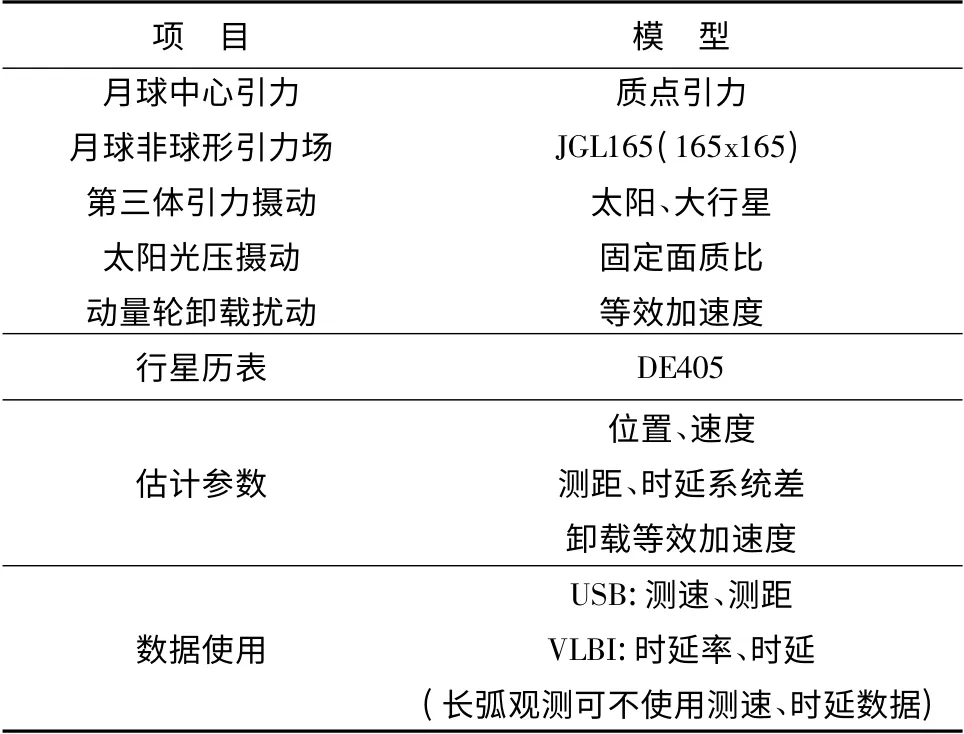
表2 环月段基本定轨策略
表2 中列出了在定轨时主要考虑的摄动源及使用的基本模型。在解算时还需要考虑测距系统差和时延系统差,计算过程中测距的系统差在30m 量级,时延的系统差为3m 量级,时延率的系统差为3mm/s 量级。除此之外,在卸载情况下解算时,轨道历元应置于卸载之后。
本文制定了卸载解算1 次、2 次、3 次及更多的4 次等策略并进行分析,比较这几种策略在解算时单次迭代时间及精密星历衔接段在T 方向上的精度,结果如表3 所示。通过比较,只解算1 次卸载在单次迭代时间上有优势,但在具体解算卸载时,如果使用1 天1个弧段进行解算,在测控数据充足的情况下可以实现,并且精度可以达到100m 的量级。但是,当嫦娥一号卫星转入长期管理时,测控资源的安排会相应减少,测控弧段也会大大减少,一般1 天只有2 ~3 圈的数据,这样便会出现卫星卸载前数据不够或者卸载后数据不够的情况,于是如表3 中所示,星历衔接段T 方向精度并无太大优势;解算3 次卸载的单次迭代时间开始加长,但是在计算过程中发现精密星历衔接处精度并不稳定,当数据弧段足够长及数据质量好的情况下,星历衔接段T 方向的精度可以达到优于100m 量级,表3 中使用一个月数据计算结果表明平均精度约为250m。随着卸载次数的增加,数据使用量也相应增加,这时单次迭代所需时间进一步加长,但无法继续提高轨道改进精度及精密星历衔接段的精度,反而会增加解算的困难,降低解算效率,甚至无法改进成功;如若进行2次卸载解算,单次迭代时间为42.3s,仅比解算1 次卸载所需时间多10s,但是在衔接段T 方向上的平均精度是4 种策略中最好的,精度优于100m,很好地弥补了上述其余3 种解算策略的不足。

表3 不同卸载次数解算情况下所需时间、T 方向精度比较结果
通过上述分析,本文制定了以下策略:用2 天的数据综合起来进行解算,需要解算2 次卸载,若在数据弧段较充足及数据质量较好的情况下,可以使用3 天的数据进行3 次卸载解算。在解算下一个弧段时,将上一个弧段卸载后的数据也加进来一起使用,使用重叠弧段法保证前后两弧段精密星历衔接处的精度。这种轨道解算策略即可保证卸载前后有充足的数据可供解算使用,又能较快较简洁地解算得到长时间的卫星精密星历,解算结果也证明了该策略解算后得出的精密星历衔接处的精度可优于100m量级。
3.2 轨道计算分析
按照上文的分析,通过对嫦娥一号卫星实测数据进行轨道计算的方式来验证该结论,分别用2007年12月26日及2008年1月4日前后2 天的数据来进行分析。
1)截断卸载
用2007年12月25日卸载后(BJT06:37:08.30)至2007年12月26日卸载前(BJT05:56:39.30)的数据进行轨道改进,然后用2007年12月26日卸载后(BJT05:56:39.30)至2007年12月27日卸载前(BJT09:40:38.10)的数据进行轨道改进,数据使用弧段分别如图3 所示,比较2 段星历搭接弧段的误差如图7 所示,上述2 段轨道改进后的测距的RMS=2.5m;同样,如图4 所示,用2008年1月3 ~5日数据及卸载时间进行定轨获取星历并比较搭接弧段处的误差如图8 所示,上述2 段轨道改进后的测距的RMS =2.4m。从图5 和6 可以看出T 方向存在km 量级的误差。结合上文的分析可以看出,卫星动量轮的卸载对于卫星的轨道在沿迹方向上有较大影响,若不考虑该影响,就很难得到一个准确的嫦娥一号卫星绕月的精密星历。

图3 解算两段星历所用数据弧段示意图
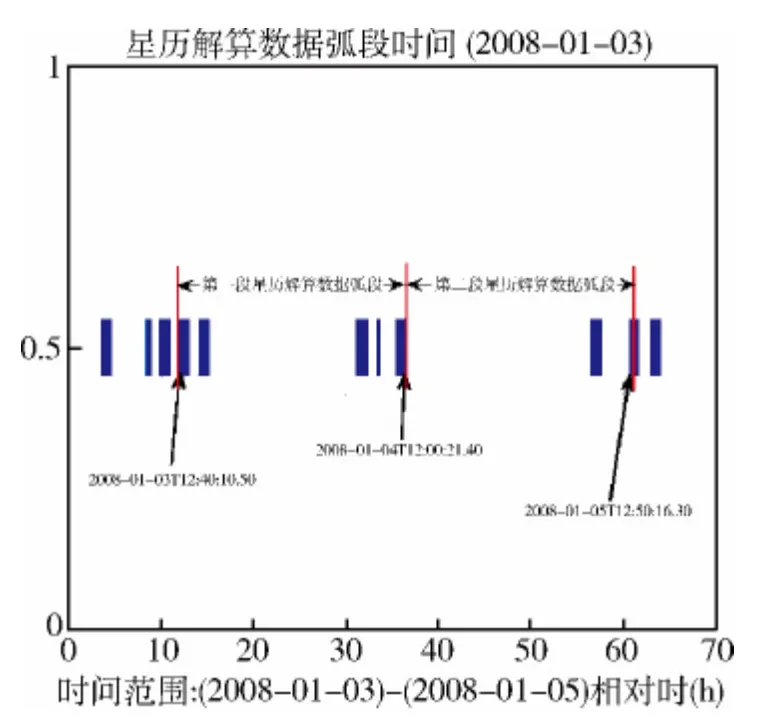
图4 解算2 段星历所用数据弧段示意图
2)解算卸载

图5 2007年12月26日不解卸载前后两段星历的位置速度误差

图6 2008年01月04日不解卸载前后两段星历的位置速度误差
同样以上文分析的2 段数据为例,利用2007年12月25日及12月26日的数据联合起来进行轨道改进,并且对25日及26日的卸载进行解算;然后联合26日卸载后的数据、27日及28日全部数据进行轨道改进,并对27日及28日的卸载进行解算,所用弧段如图7 所示,2 次定轨RMS 解算结果约为2.7m,图9 即为2 段星历搭接弧段的比较;同样,如图8 所示,利用2008年1月3 ~6日的数据使用上述策略进行轨道改进并得出衔接段星历比较图如图10 所示,定轨过程中解算的RMS 约为2.6m;在此过程中,大致需要进行2 ~3次的卸载解算,解算后的结果从图中可以看出在T 方向上的误差优于100m。

图7 解算2 段星历所用数据弧段示意图

图8 解算两段星历所用数据弧段示意图
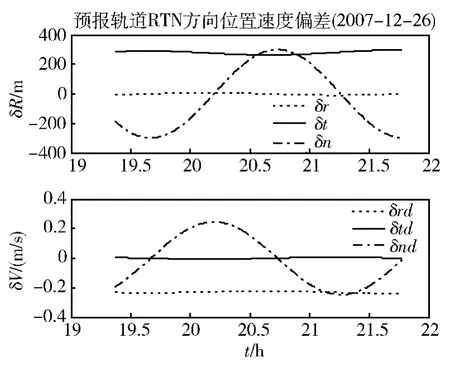
图9 2007年12月26日解卸载前后两段星历的位置速度误差
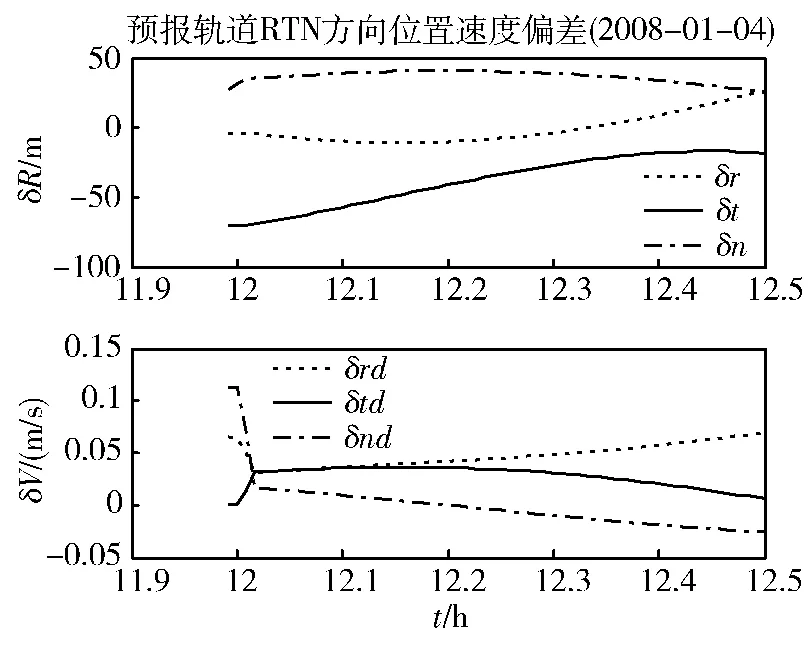
图10 2008年01月04日解卸载前后两段星历的位置速度误差
VLBI 具有极高的角分辨率(亚毫角秒量级),对轨道的横向约束强,计算的结果也表明,轨道面法向的定轨精度要明显高于其它2个方向[13],而USB观测量对轨道视向(或近似径向)的约束较强,二者联合定轨,可以互为补充,提高定轨精度。由于在计算过程中,有些数据弧段缺少VLBI 数据,使得在轨道解算时缺少对轨道面法向(N)上的约束,因此在定轨解算时会出现在轨道面法方向N 上有较大误差的情况,如有VLBI 数据支持,误差可大大减少。

图11 2007年11月29日至2008年1月22日间衔接星历T 方向精度
为了继续验证该策略可以有效地改进星历衔接处的精度,进一步使用2007年11月29日至2008年1月22日的数据进行计算,按照上述定轨策略,得出了衔接星历处的误差值,在此统计在T 方向上的误差,具体分布如图11 所示。由此可以看出,T方向上的误差一般处于100m 以下的水平,少数情况在250 ~350m 之间。对于误差超过100m 的情况逐一分析发现,在解算过程中大体包括以下几种情况:1)在衔接段数据质量较差,这直接反应在数据使用量及残差上;2)在衔接段所能使用的数据较少。若以上2 种情况中的任何一种出现,便会使误差超过100m。
经过上述的轨道计算,验证了本文提出的解算相邻的2 ~3个动量轮卸载对衔接段的精密星历精度提高有较大帮助的结论,也说明了该策略可以实现两段精密星历间的有效衔接。
4 结束语
针对嫦娥一号卫星绕月探测阶段频繁的动量轮卸载情况,为了尽可能减少这种卸载对轨道及精密星历的影响,提出了可正确有效地解算卸载的轨道改进策略,并通过科学的弧段选择,使得两段星历的衔接段的精度都有较大提高,达到了优于100m 量级,充分保证了精密星历的完整性及连续性。同时,该定轨策略可以推广运用到其它绕月探测任务中,能及时有效地获取卫星绕月时的精密星历及轨道。
[1]吴伟仁,刘晓川.国外深空探测的发展研究[J].中国航天,2004(1):26-30.(WU Weiren,LIU Xiaochuan.A Survey of Deep Space Exploration Activities Abroad[J].Aerospace China,2004(1):26-30.)
[2]魏延明,任焜,张兵. 探月工程中推进系统的初步设想[J]. 航天控制,2005,23(1):15-22. (WEI Yanming,REN Kun,ZHANG Bing. Preliminary Conception on Propulsion Systems for Chinese Lunar Exploration Project[J]. Aerospace Control,2005,23(1):15-22.)
[3]郑伟,许厚泽,钟敏,等.月球探测计划研究进展[J].地球物理学进展,2012,27(6):2296-2307. (ZHENG Wei,XU Houze,ZHONG Min,et al. Progress in International Lunar Exploration Programs [J]. Progress in Geophys,2012,27(6):2296-2307.)
[4]刘经南,魏二虎,黄劲松,等.月球测绘在月球探测中的应用[J]. 武汉大学学报·信息科学版,2005,30(2):95-100.(LIU Jingnan,WEI Erhu,HUANG Jinsong,et al . Applications of Selenodesy to Lunar Detection[J]. Geomatics and Information Science of Wuhan University,2005,30 (2):95-100.)
[5]李斐,鄢建国.月球重力场的确定及构建我国自主月球重力场模型的方案研究[J].武汉大学学报·信息科学版,2007,32(1):6-10. (LI Fei,YAN Jianguo.Principle and Method of Lunar Gravity Field Determination and Project on Self-determinational Lunar Gravity Field[J]. Geomatics and Informrmation Science of Wuhan University,2007,32(1):6-10.)
[6]边宝刚,隋起胜,孙广富.动量轮卸载在改进GEO 卫星东西轨道保持中的应用[J]. 航天控制,2008,26(3):69-73. (BIAN Baogang,SUI Qisheng,SUN Guangfu. Application of MW Unloading in Improving East-west Station Keeping of GEO Satellites[J]. Aerospace Control,2008,26(3):69-73.)
[7]李本津,郑军,陈宏. 三轴稳定同步卫星定点保持控制效果快速评估算法[J]. 航天控制,2010,28(3):11-16.(LI Benjin,ZHENG Jun,CHEN Hong. Rapid Evaluation Algorithm of Station-keeping Control Results for Three-axis Stabilized Geostationary Satellites [J].Aerospace Control,2010,28(3):11-16.)
[8]章仁为.卫星轨道姿态动力学与控制[M]. 北京:北京航空航天大学出版社,1998:270-273.
[9]肖业伦. 航天器飞行动力学原理[M]. 北京:宇航出版社,1995:74-79,239-243.
[10]李济深.人造卫星精密轨道确定[M]. 北京:解放军出版社,1995.第一章.
[11]汤锡生,陈贻迎,朱民才. 载人飞船轨道确定和返回控制[M].北京:国防工业出版社,2002.
[12]陈明,唐歌实,曹建峰,张宇.嫦娥一号绕月探测卫星精密定轨实现[J]. 武汉大学学报·信息科学版,2011,36(2):212-216. (CHEN Ming,TANG Geshi,CAO Jianfeng,ZHANG Yu. Precision Orbit Determination of CE-1 Lunar Satellite[J]. Geomatics and Information Science of Wuhan University,2011,36(2):212-216.)
[13]黄勇,胡小工,黄珹等.利用VLBI 数据确定“探测一号”卫星的轨道[J]. 天文学报,2006,47(1):81-92.(HUANG Yong,HU Xiaogong,HUANG Cheng,et al.Orbit Determination of TanCe-1 Satellite Using VLBI Data[J]. Acta Astronomica Sinica,2006,47(1):81-92.)
