基于积分多普勒平滑伪距的导航算法研究*
2015-12-05刘亚玲丁翠玲
金 磊 陈 帅 刘亚玲 丁翠玲
南京理工大学自动化学院,南京210094
全球导航定位系统(Global Navigation Satellite Systems,GNSS)可在全球范围内为多用户全天候、全天时、连续地提供高精度导航信息,在航天航空、测绘、交通等军民用领域已取得巨大成功[1],但极易受到高机动、障碍遮挡、信号干扰等因素影响,在很大程度上限制了其应用范围[2],随着众多军民用导航产品对其导航性能需求的不断提升,如何在复杂环境下实现高精度定位导航已成为研究焦点。
鉴于复杂环境下高精度定位导航的重要性,国内外广大学者对其进行了持久深入的研究,取得了大量研究成果,给出了多种解决办法。国外学者从20 世纪80年代开始对平滑伪距展开了研究,Hatch首次提出了采用载波相位平滑伪距提高定位精度[3],其他学者对Hatch 滤波理论进行了进一步发展和完善[4-5]。国内学者也取得了大量研究成果,隋叶叶等分析了载波相位平滑伪距算法的伪距精度和定位精度[6],刘瑞华、常志巧和宋伟宁等分别研究了载波相位平滑伪距在北斗卫星导航系统[7]、差分定位系统[8]和区域实时定位系统[9]中的应用。
针对复杂环境下GNSS 接收机载波跟踪环路的信号失锁和相位失周现象,对电离层效应及延时校正模型进行了研究,对跟踪环路多普勒频移采用了α-β 滤波算法。针对载波相位平滑伪距现存缺点,提出了基于积分多普勒平滑伪距的导航算法,完成了该算法在静态、动态条件下的导航性能测试实验,分析了GNSS 接收机采用该算法的导航精度和稳定性能。
1 电离层效应及校正模型
电离层离地表高度为50 km ~1000 km,在太阳光的强烈辐射下,存在大量正离子和自由电子,不仅会造成卫星信号传播路径的弯曲,而且会引起卫星信号传播速度的变化,导致卫星信号产生延时误差,伪距和载波相位的电离层延时误差主要由观测时间、测点位置、卫星高度角和季节变化等众多复杂因素决定[10]。
单频GNSS 接收机无法直接测定电离层延时误差,一般采用Klobuchar 模型估算电离层延时误差予以校正和补偿,卫星信号在电离层刺穿点的天顶电离层延时Iz为
卫星的倾斜率F:

式中,θ 为卫星高度角。
因此,卫星信号电离层延时校正值为

式中,ζ 为卫星在电离层刺穿点的天顶角。
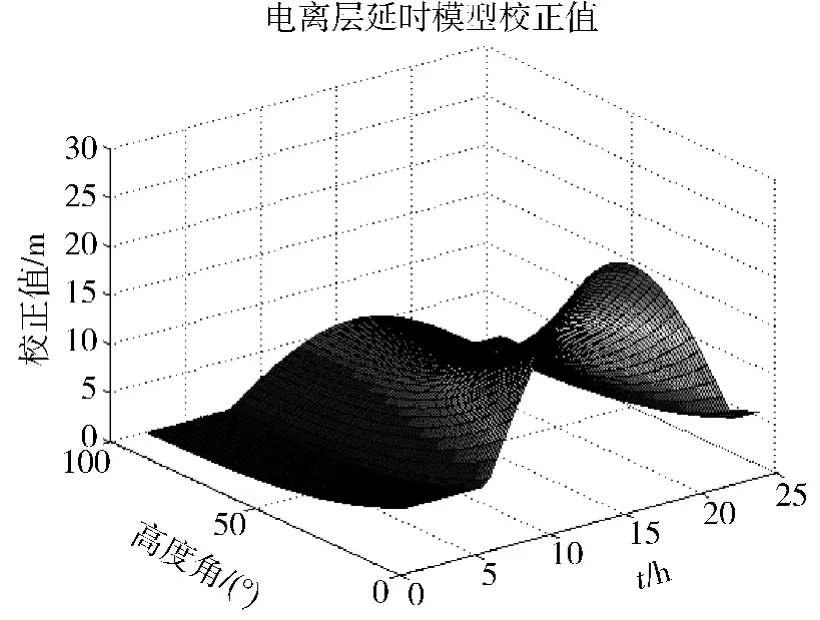
图1 电离层延时校正曲线图
图1 表明,观测时间和卫星高度角对电离层延时误差校正有显著影响,白天(8 ~18h)延时误差校正值较大,晚间较小;卫星高度角越低,延时误差校正值越大,采用Klobuchar 模型校正电离层延时的模型误差大约为1 ~3m,可校正真实电离层延时误差的50% ~60%。
2 载波相位平滑伪距
GNSS 接收机中伪距观测值可真实反映卫星与载体之间距离,但存在时钟钟差、大气延时和多路径等各种误差,采用精确、平滑的载波相位观测值平滑伪距可在一定程度上提高导航精度。
在k 时刻,根据卫星信号接收时间和卫星信号发射时间可得伪距观测值ρk:

式中,rk为卫星与载体之间的几何距离,为接收机时钟误差,为卫星时钟误差,ΔρIono为电离层延时误差,ΔρTro为对流层延时误差,为未知的伪距测量噪声,c 为光速。
在k 时刻,根据接收机接收、测量到的卫星载波信号可得载波相位观测值为:

载波相位平滑伪距基于Hatch 滤波算法,采用精确、平滑的载波相位观测值对粗糙但无模糊度的伪距进行平滑:

式中,ρs,k为在k 时刻载波相位平滑伪距,M 为平滑时间常数,一般取值在20 ~100 之间。
尽管载波相位平滑伪距已被广泛接受和应用,但该算法还存在以下缺点[11-12]:
1)该算法假定电离层延时保持不变,实际电离层延时受观测时间、测点位置、卫星高度角和季节变化等复杂因素影响,采用Klobuchar 模型校正电离层延时仍存在1 ~3m 的模型误差,载波相位平滑伪距将逐渐累积成较大的电离层延时总变化量误差;
2)接收机必须一直锁定载波,跟踪环路不产生信号失锁和相位失周,保持在各个时刻周整模糊度值N 不变,即使接收机发生短时信号失锁或相位失周,载波相位观测值中的周整模糊度N 将发生跳变,严重影响载波相位观测值的精度;
3)载波相位平滑伪距初始值ρs,1存在较大偏差,需要长时间拟合才能逐渐消除此偏差,无法满足快速高精度定位的导航需求。
3 积分多普勒平滑伪距
针对载波相位平滑伪距现存缺点,采用α-β 滤波算法实时平滑多普勒频移消除电离层延时误差;针对跟踪环路信号失锁或相位失周,采用积分多普勒频移平滑伪距,提高平滑伪距精度;为满足快速高精度定位的导航需求,对平滑伪距初始值进行均值处理。
3.1 α-β 滤波算法
在k 时刻,从GNSS 接收机各通道跟踪环路获得多普勒频移观测值,则有:式中,i 是GNSS 接收机通道编号,i =1,2,…,12;T跟踪环路积分时间,取T=1ms;α,β 为α-β 滤波参数,α=0.005,β = 10α2/(2 - α);分别为k时刻多普勒频移先验估计值,多普勒频移变化率先验估计值;分别为k 时刻多普勒频移滤波值,多普勒频移变化率滤波值。
3.2 积分多普勒平滑伪距
载波跟踪环路发生短时信号失锁和相位失周等现象,会严重降低载波相位平滑伪距的精度,对多普勒频移采用α -β 滤波算法,基于积分多普勒平滑伪距可显著降低短时信号失锁和相位失周对平滑伪距的影响。

采用Hatch 滤波算法,利用积分多普勒平滑伪距:


式中,N 为均值处理常数,取N=20。
4 实验与分析
为了验证该算法的有效性和可靠性,基于GNSS 软件接收机开发验证平台,分别采用载波相位平滑伪距算法和积分多普勒平滑伪距算法,完成静态、动态环境下导航性能测试实验,分析GNSS 接收机的导航精度和稳定性能。
4.1 静态实验
GNSS 天线置于南京理工大学自动化学院主楼楼顶,静态实时采集卫星信号,坐标:北纬32.02613°、东经118.85780°、高程为73m,取100s 中频数字信号完成静态性能测试实验。
采用载波相位平滑伪距算法静态导航结果如图1 ~2。
采用积分多普勒平滑伪距算法静态导航结果如图3。

图2 载波相位平滑伪距算法静态导航误差

图3 积分多普勒平滑伪距算法静态导航误差
4.2 动态实验
采用卫星导航信号模拟器仿真载体高动态匀速直线飞行轨迹,起始点:北纬32.28950°、东经119.10990°、高度1118.2m,终止点:北纬32.81444°、东经119.61815°、高度3872.9m,飞行速度为340m/s,整个飞行过程耗时240s,采集100s 中频数字信号完成动态性能测试实验。
采用载波相位平滑伪距算法动态导航结果如图4。采用积分多普勒平滑伪距算法动态导航结果如图5。

图4 载波相位平滑伪距算法动态导航误差
4.3 实验分析
根据以上载波相位平滑伪距算法和积分多普勒平滑伪距算法的静态、动态实验,分析静态、动态条件下定位、速度导航精度。
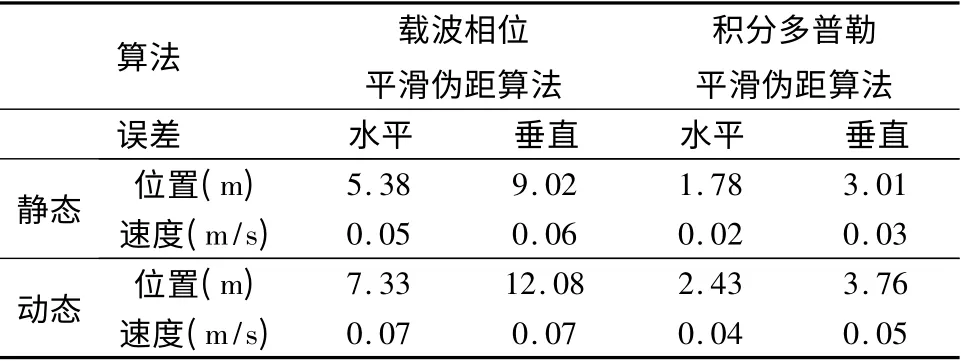
表1 静态、动态实验导航精度(1σ)
根据图2、图3 和表1 可知,在静态条件下GNSS 接收机采用该算法定位精度优于3m,速度精度优于0.03m/s,导航稳定性显著提高。

图5 积分多普勒平滑伪距算法动态导航误差
根据图4、图5 和表1 可知,在动态条件下GNSS 接收机采用该算法定位精度优于4m,速度精度优于0.05m/s,导航稳定性有较大提高。
5 结论
以GNSS 接收机导航算法为研究对象,完成了:
1)针对载波相位平滑伪距现存缺点提出基于积分多普勒平滑伪距的导航算法,为复杂环境下高精度定位导航提供了重要依据;
2)进行静态、动态条件下算法测试对比实验,结果表明采用该算法在静态、动态条件下定位精度优于5m、速度精度优于0.05m/s,显著提高GNSS 接收机的导航稳定性;
3)鉴于我国自主研发的北斗卫星导航系统(BeiDou Navigation Satellite System-“BDS”)已提供区域性服务,该算法研究有助于实现BDS 高精度导航,为BDS 的进一步理论研究和工程实现提供重要参考。
[1]谢钢.GPS 原理与接收机设计[M]. 北京:电子工业出版社,2011. (Xie Gang. Principles of GPS and Receiver Design[M]. Beijing:Publishing House of Electronics Industry,2011.)
[2]Elliott D K,Christopher J H. Understanding GPS Principles and Application,Second Edition[M]. Normood,MA:Artech House,2007:148-162.
[3]Hatch R. The Synergism of GPS Code and Carrier Measurements[C]. Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning,Las Cruces,New Mexico,U. S. A.,1982,1(2):1213-1232.
[4]Yang L,Hill C,Meng X. Evaluation of Network RTK GPS Correction Transmission Delay and Loss[C]. ENC GNSS2008,Toulouse,France,2008.
[5]Park B,Kee C. Optimal Hatch Filter with A Flexible Smoothing Window Width[C]. ION GNSS 18thInternational Technical Meeting of the Satellite Division,Long Beach,2005.
[6]隋叶叶,杨小江,柳涛.载波相位平滑伪距算法研究与精度分析[J]. 电子工程设计,2013,21(8):112-115.(Sui Yeye,Yang Xiaojiang,Liu Tao. Accuracy Analysis of Code Pseudorange Smoothing Algorithm[J]. Electronic Design Engineering,2013,21(8):112-115.)
[7]刘瑞华,杨兆宁,詹先龙.北斗系统载波相位平滑伪距研究[J]. 中国民航大学学报,2012,30(3):28-31.(Liu Ruihua,Yang Zhaoning,Zhan Xianlong. Research on Carrier Phase Smoothed Pseudo-range of Compass[J]. Journal of Civil Aviation University of China,2012,30(3):28-31.)
[8]常志巧,郝金明,李军正.载波相位平滑伪距及其在差分定位中的应用[J]. 海洋测绘,2009,29(3):21-23. (Chang Zhiqiao,Hao Jinming,Li Junzheng.Carrier Phase Smoothed Pseudorange and Its Application in DGPS[J]. Hydrographic Surveying and Charting,2009,29(3):21-23.)
[9]宋伟宁,张彦仲,邵定蓉. 载波相位平滑伪距算法在区域实时定位系统中的应用[J].遥测遥控,2011,32(4):25-28. (Song Weining,Zhang Yanzhong,Shao Dingrong.A Robust Algorithm of Carrier Phase Smoothed Pseudo Range in Real Time Location Systems[J]. Journal of Telemetry,Tracking and Command,2011,32(4):25-28.)
[10]刘基余. GPS 卫星导航定位原理与方法(第二版)[M].北京:科学出版社,2012. (Liu Jiyu. Principles and Method of GPS Satellite Navigation and Position,Second Edition[M]. Beijing:Science Press,2012.)
[11]王虎.GPS 精密单点定位中电离层延时改正模型的研究与分析[D].长沙:中南大学,2008.(Wang Hu.Research on the Model of Ionospheric Delay Correction in GPS Precise Point Positioning[D]. Changsha:Central South University,2008.)
[12]韩丽丽. GPS 单频精密单点定位中电离层误差的研究[D].成都:成都理工大学,2012. (Han Lili. Research on the Ionospheric Error in GPS Single-Frequency Precise Point Positioning[D]. Chengdu:Chengdu University of Technology,2012.)
