车辆通过交叉口的生态驾驶轨迹优化研究
2015-12-05靳秋思宋国华叶蒙蒙
靳秋思,宋国华,叶蒙蒙,刘 娟,于 雷,3
(1.北京交通大学城市交通复杂系统理论与技术教育部重点实验室,北京 100044;2.环境保护部环境认证中心/中环联合(北京)认证中心有限公司,北京 100029;3.德克萨斯南方大学科技学院,美国休斯顿77004)
随着城市化、机动化进程的快速发展,城市机动车排放问题日益严峻。已发布的数据显示,北京市PM2.5本地排放源解析结果为机动车占31.1%[1]。机动车排放与其运行模式直接相关,而道路类型和周围的交通条件直接决定车辆的运行模式。由于在城市道路上设有交通信号,车辆经常出现启停和怠速现象,造成车辆延误、燃料消耗和污染物排放增加,使交叉口成为尾气排放的重要区域[2]。已有研究表明,交通信号增大了车辆延误、燃料消耗和尾气排放[3-4]。同时,研究表明“生态驾驶”(Eco-Driving)[5-6]策略可降低5%~30%燃油消耗和尾气排放;在信号交叉口,提前告知信号信息平均可节省13.6%的燃料[7];利用辅助系统为驾驶员提供信号信息可显著降低油耗和排放[8-9]。但是,目前尚缺乏车辆通过交叉口的生态驾驶轨迹优化方面的研究。尽管Rakha等[10]通过车-路协同技术获取信号相位和时间,建立了以油耗最低为目标的驾驶行为优化方法;Asadi等[11]开发的匀速驾驶预测系统可节省油耗47%、旅行时间5%。然而,大部分研究对交叉口处停车熄火的驾驶行为对油耗排放的贡献缺乏考虑,而且不能为驾驶员提供驾驶建议。同时,当前广泛应用的机动车排放量化模型主要是基于车辆自身性能特征来建立的较少考虑路网微观交通流运行状态对车辆排放的影响,不适合于研究交叉口动态运行状态与车辆排放间的关系。而在合理的车-路通信范围内,基于信号配时信息,建立生态驾驶策略模型和车辆的生态驾驶轨迹优化算法,可减少机动车在交叉口范围内急加速、急减速以及长时间怠速等激进驾驶行为,进而减少油耗和排放。鉴于此,本文基于比功率参数的排放模型,按照车辆所在信号相位的状态,定量分析车辆在交叉口范围内的驾驶行为特性,设计相应的生态驾驶策略模型和车辆的生态驾驶轨迹优化算法,并利用MATLAB 开发程序对其效果进行评估。
1 基于机动车比功率参数的排放模型
根据排放测算机理,对机动车行为特性的刻画方法包括基于固定行驶周期和基于比功率分布两类。基于固定行驶周期的机动车行为特性刻画方法是对大量测试结果进行统计回归得到的平均化结果,而基于比功率分布的机动车行为特性刻画方法考虑了机动车在道路上的微观行驶情况,更能反映动态交通特性。机动车比功率(Vehicle Specific Power,VSP)是指发动机移动单位质量所输出的功率,可以将车辆的瞬时运动状态与排放联系起来。对典型轻型车而言,VSP 可以简化为[12]
式中:VSP 为机动车比功率(kW/t或W/kg);v 为速度(m/s);a为加速度(m/s2)。
为清晰地表示VSP 变量与排放的关系,Frey等[12]提出了VSP 聚类方法,即将VSP 按照一定的间隔划分为不同的区间单元(Bin),以每个Bin下的排放率或油耗率的平均值作为预测模型的基础数据。根据机动车数据样本量以及分布情况,现有研究提出了不同的VSP 划分方法[13-14]。本文以1 kW/t为间隔[12],以[-20kW/t,20kW/t]为研究范围,对VSP 进行聚类处理,VSP 聚类方法如下:
式中:n为整数,本文中n为-20至20之间的整数。
车辆逐秒加速度可由逐秒速度计算得出,通过式(1)可得机动车逐秒的VSP 值,每一条逐秒的数据代表一个样本,进而利用下式通过VSP 聚类方法可计算典型车辆每个VSP Bin下的平均排放率[15]:
排放量等于排放率与排放时间之积,可得每个VSP Bin下的排放量,而总排放量为每个VSP Bin下的排放量之和,具体表示为
式中:E 为污染物i 的总排放量(g);p 为VSP Bin区间总个数。
2 交叉口范围内车辆驾驶行为分析及驾驶策略研究
本文的研究对象假设为单车,不考虑车辆排队、跟驰行为等外部因素,同时假定交叉口的信号灯配时情况可以通过短程无线通讯技术(Dedicated Short Range Communication,DSRC)和车-路通信系统传递给车辆,驾驶员通过车载系统可获知当前信号状态,并假设驾驶员100%同意引导的速度,即一旦通过交叉口,他的任务是通过加速或减速的方式回到最初的速度。交叉口分析区域包括上、下游两部分,具体参数如下:
(1)道路基础设施参数:DU和DD分别为交叉口上、下游的研究范围(m);TR、TG分别为当前至信号变为红灯的时间(Time to Red,s)、变为绿灯的时间(Time to Green,s);vlimit为路段的限速(m/s);
(2)车辆实时运行参数:v0为车辆进入DSRC通信范围的初始速度(m/s);d0为除去驾驶员在反应时间内的车辆行驶距离(m),即车辆在交叉口上游距离信号灯的距离;t0为驾驶员的反应时间(s);t为除去驾驶员反应时间,车辆从进入DSRC通信范围到驶离交叉口的时间(s);aa、ad分别为车辆的加、减速度(m/s2);aa-max为最大加速度(m/s2);ad-max、ad-min分别为最大减速度和最小减速度(m/s2);vmax为最大速度(m/s);ta、td、tc分别为加速、减速、匀速行驶时间(s);ts为停车熄火或怠速等待时间(s)。
2.1 当前信号为绿灯
2.1.1 当前至信号变为红灯的时间(TR)较长
在此情景下,车辆以当前速度可匀速通过交叉口。该情景的判断条件为
2.1.2 当前至信号变为红灯的时间(TR)较短
在此情景下,车辆以当前速度不能匀速通过交叉口,此时驾驶员可通过如下驾驶策略:①加速通过策略,即车辆进行加速运动,然后匀速通过交叉口,在交叉口下游再进行减速运动,直到速度降到v0时再进行匀速运动;②停车等待策略,即车辆缓慢地减速停车,然后怠速等待下一个绿灯,再匀加速直到v0后进行匀速运动。该情景的判断条件为
对于加速通过策略,由于驾驶员的驾驶行为特性不同,致使相同情景下车辆有不同的速度轨迹,但可根据行驶距离、时间、车辆最大加减速度以及道路限速等约束条件建立模型,对车辆在交叉口上游和下游的速度轨迹进行定量表达,详见表1。

表1 TR较短时加速通过策略下车辆在交叉口的驾驶轨迹Table 1 Driving trajectories with the accelerating strategy at intersection when TRis shorter
对于停车等待策略,车辆在交叉口上游和下游的速度轨迹的定量表达见表2。
2.1.3 当前至信号变为红灯的时间(TR)非常短
在此情景下,车辆匀速和加速行驶都不能在剩余绿灯时间内通过交叉口,此时驾驶员的驾驶策略为:车辆减速至0或某固定值,怠速或匀速至信号变为绿灯后,车辆通过交叉口。该情景的判断条件为
此时车辆在交叉口上游和下游的驾驶轨迹定量表达式与TR较短时的停车等待策略一致。
2.2 当前信号为红灯
2.2.1 当前至信号变为绿灯的时间(TG)较长
在此情景下,驾驶员的驾驶策略为:车辆匀减速运动到达交叉口停车线后,停车等待;当信号变为绿灯后,车辆再进行匀加速运动。该情景的判断条件为

表2 TR较短时停车等待策略下车辆在交叉口的驾驶轨迹Table 2 Driving trajectories under the decelerating and idling strategy at intersection when TRis shorter
此时车辆在交叉口上游和下游的速度轨迹的定量表达见表3。
中国食品工业总产值从百亿元级到万亿元级的背后,是众多功勋人物、领军人物孜孜以求、攻坚克难的不懈努力,是众多食品企业争创百年老店、力求让消费者满意的永恒追求。
2.2.2 当前至信号变为绿灯的时间(TG)较短
在此情景下,驾驶员的驾驶策略为:首先进行匀减速运动,减至某固定值后匀速运动到达交叉口;当信号灯变为绿灯后,车辆再进行加速运动。该情景的判断条件为
此时车辆在交叉口上游和下游的速度轨迹的定量表达见表4。

表3 TG较长时车辆在交叉口的驾驶轨迹Table 3 Driving trajectoriesat at intersection when TGis longer
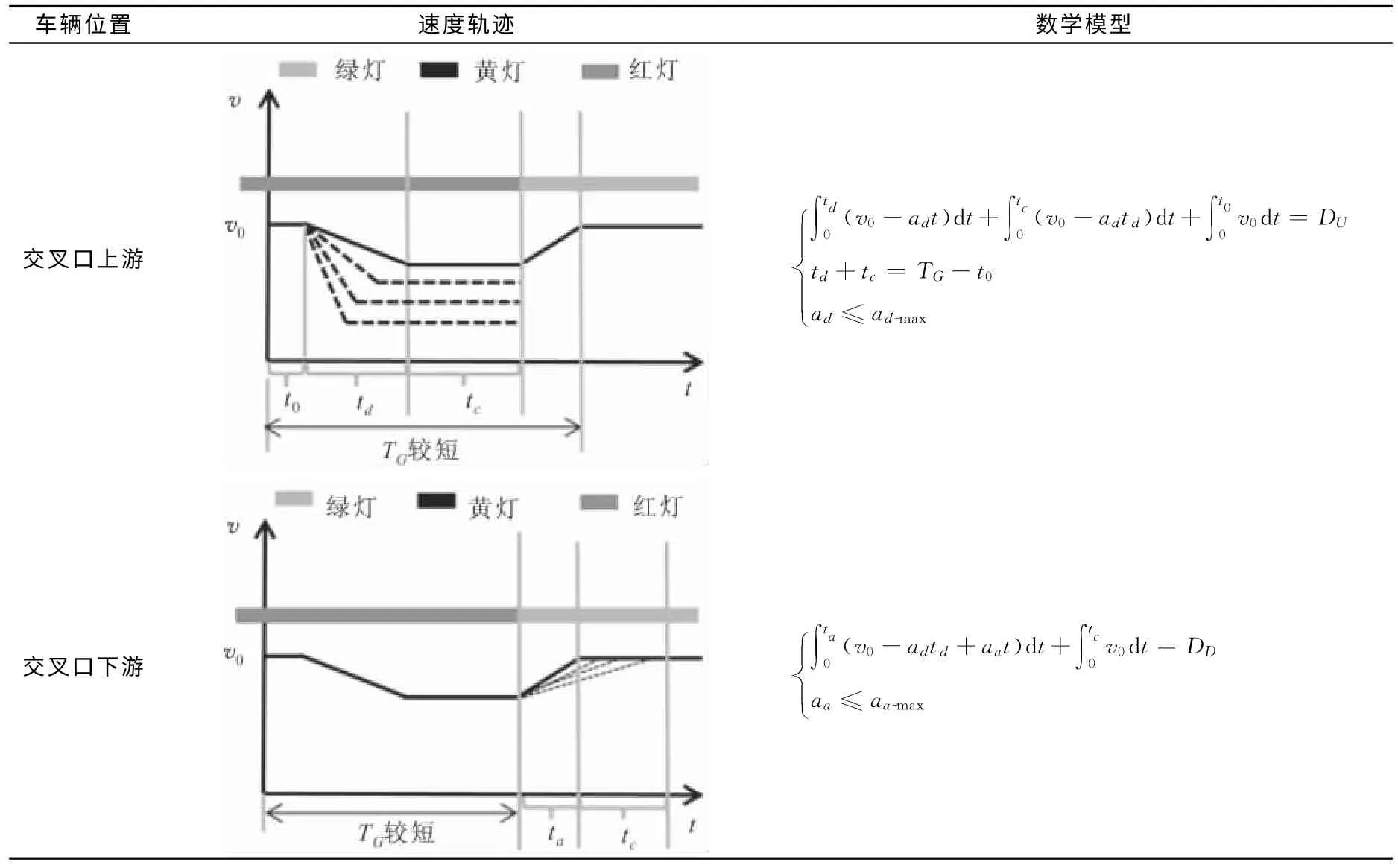
表4 TG较短时车辆在交叉口的驾驶轨迹Table 4 Driving trajectoriesat at intersection when TGis shorter
2.2.3 当前至信号变为绿灯的时间(TG)非常短
在此情景下,车辆无需减速,匀速行驶即可通过交叉口。该情景的判断条件为
2.3 车辆驾驶策略的判断流程
各情景下车辆驾驶策略的判断流程见图1。
3 基于MATLAB仿真的生态驾驶轨迹优化
为了评估生态驾驶策略与算法的有效性,本文通过MATLAB 仿真手段对设定情景进行了生态驾驶轨迹的优化与分析。车辆的匀速、加速、减速的剧烈程度和时间长短对于车辆的油耗和排放有显著的影响,故有必要在确定驾驶员驾驶策略后进行生态驾驶轨迹优化。交叉口和车辆的基本仿真参数见表5。

表5 交叉口和车辆的基本仿真参数Table 5 Basic simulation parameters of the intersection and vehicles
3.1 生态驾驶轨迹优化
本文设定场景为当前信号灯为红灯,至变为绿灯的时间TG较短。由上文可知,驾驶员已确定选择减速通过策略,因此需结合排放量化模型进一步优化驾驶员在交叉口上游及下游的具体加减速时间和加减速度。
3.1.1 交叉口上游的减速轨迹
根据式(9),将表5 中的参数代入可得26<TG≤52,不失一般性,假定TG=31;再将初始速度v011.11m/s代入表4中车辆在交叉口上游的速度轨迹数学模型中,可得到交叉口上游不同减速方案下的瞬时速度vt为
式中:0.10m/s2≤ad≤3.0m/s2;tc+td≤30s。
假定最小减速时间为1s,以1s为步长逐秒递增交叉口上游的减速时间td;且匀速时间tc以1s为步长从0至30间取值。通过MATLAB 开发程序,结合生态驾驶算法进行仿真,共形成433个驾驶轨迹可行解,并结合VSP 聚类算法和各VSP Bin下平均排放率,可得到通过交叉口上游不同驾驶轨迹的排放量,表6 为部分方案的仿真结果。由于CO2排放量与燃油的消耗呈线性关系[15],所以本次生态驾驶策略模型以CO2的排放量作为评价指标,故选择方案1为生态驾驶辅助系统为驾驶员提供的驾驶方案,即车辆以初始速度11.11 m/s行驶1s后,以0.18 m/s2匀减速行驶10s,最终速度达到9.33m/s后匀速行驶20s,即可通过交叉口上游。

表6 通过交叉口上游不同驾驶轨迹的方案分析Table 6 Analysis of different driving trajectories in intersection upstream
3.1.2 交叉口下游的加速轨迹
通过前文可知车辆进入交叉口下游的速度为9.33 m/s,由假设可知车辆在交叉口下游会采取加速的方式直到速度达到11.11m/s后,才匀速离开交叉口,则可得到交叉口下游不同加速方案下的瞬时速度v为
交叉口下游不同加速方案下的瞬时加速度aa为
由表4中车辆在通过交叉口下游的速度轨迹数学模型可得
式中:0.13m/s2≤aa≤2.5m/s2。
假定最小加速时间为1s,以1s为步长逐秒递增交叉口下游的加速时间ta,即ta∈[1,13],并根据ta的不同取值可得相应的aa,再通过式(15)进而可得到tc。通过MATLAB 开发程度,结合生态驾驶算法进行仿真,共得到13个加速驾驶轨迹方案,对应的排放量见表7。

表7 通过交叉口下游不同驾驶轨迹的方案分析Table 7 Analysis of different driving trajectories in intersection downstream
由表7可见,方案10的CO2排放量最低,为通过交叉口下游的生态驾驶轨迹。具体驾驶方案为:车辆以0.18m/s2匀加速行驶10s,速度达到11.11 m/s后,匀速通过交叉口下游。
3.2 生态驾驶轨迹的效果评价
经计算,通过与其他常规驾驶轨迹的平均排放量加以对比,本文提出的生态驾驶轨迹在不显著增加行程时间的同时,分别使车辆CO2、NOx、CO、HC 4种排放物分别降低了30.1%、23.6%、24.9%、21.5%,详见表8。
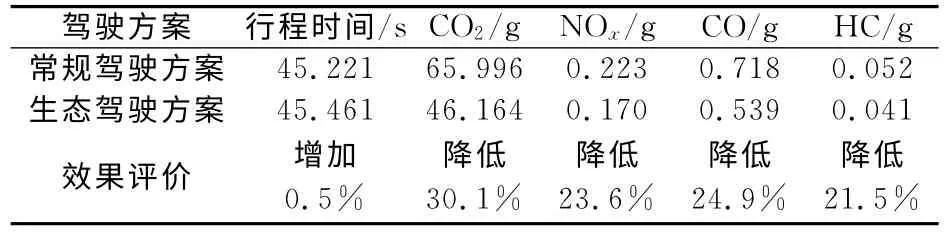
表8 生态驾驶轨迹的效果评价Table 8 Evaluation of eco-driving trajectories
4 结论
为减少驾驶员通过交叉口时的急加速、急减速、怠速等易造成高油耗和高排放的驾驶行为,本文首先定量分析了常规情况下驾驶员通过交叉口的驾驶行为特性;然后针对各情景分别从交叉口上游和下游出发,设计了相应的生态驾驶策略模型和生态驾驶轨迹优化算法;最后通过MATLAB 仿真,结合基于比功率参数的排放模型进行了排放对比分析,结果表明所建立的生态驾驶轨迹优化算法在不影响行程时间的前提下,能够显著降低车辆CO2、NOx、CO、HC 4种排放物约20%~30%,可为面向生态的驾驶辅助系统提供生态驾驶轨迹实用算法。在未来研究中,需进一步研究路径以及排队影响下的生态驾驶策略与方法,从而完整地优化车辆的驾驶轨迹。
[1]骆倩雯.PM2.5超三成来自机动车[N].北京日报,2014-4-16(5).
[2]张潇,于雷,宋国华.基于PEMS技术的交叉口尾气排放特性分析[J].安全与环境工程,2006,13(3):50-54.
[3]Unal A,Rouphail N,Frey H.Effect of arterial signalization and level of service on measured vehicle emissions[C]//The 82nd Transportation Research Board Annual Meeting,Transportation Research Board of the National Academies.Washington,D.C.,USA,2003,1842:47-56.
[4]Coelho M,Farias T,Rouphail N.Impact of speed control traffic signals on pollutant emissions[J].Transportation Research Part D:Transport and Environment,2005,10(4):323-340.
[5]Boriboonsomsin K,Vu A,Barth M.Eco-driving:Pilot evaluation of driving behavior changes among U.S.drivers[R].California:University of California Transportation Center Faculty Research,2010:1-17.
[6]Sivak M,Schoettle B.Eco-driving:Strategic,tactical,and operational decisions of the driver that influence vehicle fuel economy[J].Transport Policy,2012,22:96-99.
[7]Xia H,Boriboonsomsin K,Schweizer F,et al.Field operational testing of Eco-approach technology at a fixed-time signalized intersection[C]//15th International IEEE Conference on Intelligent Transportation Systems.Anchorage:Alaska,USA,2012:188-193.
[8]Wu G,Boriboonsomsin K,Zhang W,et al.Energy and emission benefit comparison of stationary and in-vehicle advanced driving alert systems[J].Transportation Research Record:Journal of the Transportation Research Board,2010,2189(1):98-106.
[9]Sun J,Niu D,Chen S,et al.Development and investigation of a dynamic eco-driving speed guidance strategy for signalized highway traffic[C]//The 92nd Transportation Research Board Annual Meeting,Transportation Research Board of the National Academies.Washington,D.C.,USA,2013.
[10]Rakha H,Kamalanathsharma R K.Eco-driving at signalized intersections using V2Icommunication[C]//14th International IEEE Conference on Intelligent Transportation Systems.Washington,D.C.,USA,2011.
[11]Asadi B,Vahidi A.Predictive cruise control:Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time[J].Control Systems Technology,IEEE Transactions,2011,19(3):707-714.
[12]Frey H,Unala A,Chen J,et al.Methodology for developing modal emission rates for EPA’s multi-scale motor vehicle and equipment emission estimation system[R].Washington,D.C.:North Carolina State University,2002.
[13]Davis N,Lents J,Osses M,et al.Developing countries:Development and application of an international vehicle emissions model[C]//The 84th Transportation Research Board Annual Meeting,Transportation Research Board of the National Academies.Washington,D.C.,USA,2006,1939:155-165.
[14]U.S.Environmental Protection Agency.Motor Vehicle Emissions Simulator(MOVES)2010 User Guide[R].EPA-420-B-09-041.Washington,D.C.,USA,2009.
[15]宋国华,于雷.城市快速路上机动车比功率分布特性与模型[J].交通运输系统工程与信息,2010,10(6):133-140.
[16]邵荟锦.城市信号交叉口混合交通的冲突概率研究[D].北京:北京交通大学,2008.
[17]Tang P,Yu L,Song G.Effect of driving behaviors on emissions in eco-driving at intersections[C]//The 92nd Transportation Research Board Annual Meeting,Transportation Research Board of the National Academies.Washington,D.C.,USA,2013.
