顾及光束入射角的点云点位精度评定模型研究
2015-12-04邹双朝叶珉吕花向红
邹双朝,叶珉吕,花向红
(1.长江科学院工程安全与灾害防治研究所,武汉430010;2.佛山市城市规划勘测设计研究院,广东佛山 528000;3.武汉大学 测绘学院,武汉430079)
1 研究背景
三维激光扫描技术以其数据获取速度快、实时性强、精度高及全天候工作等优点而被广泛应用于变形监测、工业设计、土木工程及数字城市等领域,其测量原理与全站仪相似,在以仪器中心为原点的三维极坐标系中,测量斜距ρ的同时记录激光束的水平角φ及竖直角θ,从而解算目标点的三维坐标,具体计算公式为
对式(1)两边同时微分,根据误差传播定律有
则点位精度为

根据式(3)可以对扫描获取的点云数据进行质量评价,已广泛应用于三维激光点云单点定位精度的评定。
此模型仅通过测距值、测角值及仪器的测距、测角精度对点位精度进行评定,在被扫描物体外观形状较为规则的情况下,如图1(a)所示,使用此评定模型能够很好地对获取的点云数据的质量进行评价。而当物体外观呈现不规则形状时,如图1(b)所示,三维激光扫描仪发射的光束到达物体表面相似位置的距离、角度几乎相同,但由于物体外观形状不规则,会对入射光束的反射路径、强度等产生影响,进而影响点云数据的质量,因此仅依靠测距值、测角值及仪器的测距、测角精度对点位精度进行评定是不可行的,还需顾及被扫描物体的外观形状对扫描精度的影响。因此,本文拟提出一种顾及光束入射角的点云点位精度评定模型,用于定量评价目标物体的外观形状对扫描精度的影响程度。
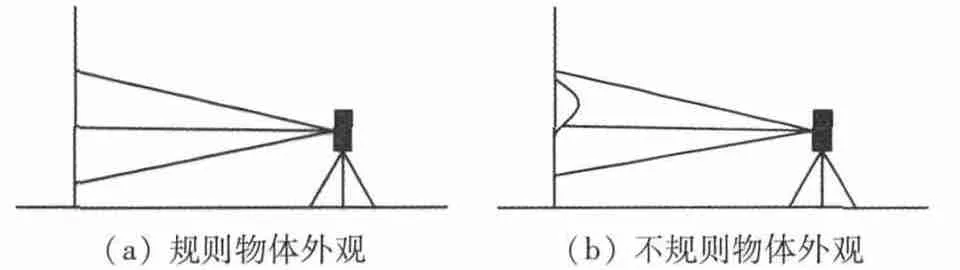
图1 物体外观形状扫描Fig.1 Scanning of appearance shapes of objects
2 新评定模型的建立
三维激光扫描仪是根据从物体表面返回的信号进行测量的,因此,点云数据质量与被扫描物体的反射激光强度也有关,而反射强度受被扫描物体的物理特性影响,其包括光束入射角和物体的材质、颜色、粗糙度、温度、湿度等。目前大多数的理论研究和实验都是简单的定性分析,由于被扫描物体外观、材质等各异,因而本文引入光束入射角的概念,以期对于目标物体外观形状等因素对扫描精度的影响进行定量分析。
根据简单的数学关系,光束入射α可由式(4)向量夹角公式计算可得,即
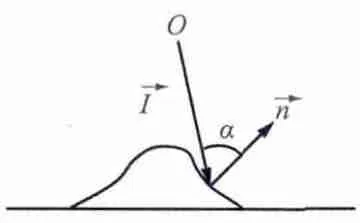
图2 光束入射角Fig.2 Incident angle

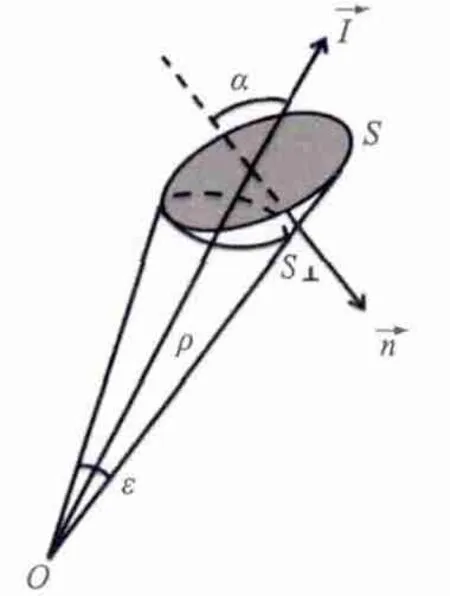
图3 激光光斑示意图Fig.3 Schematic diagram of Laser spot

又由于

则可得光斑面积为

由式(7)可以看出,光斑面积与测距、光束发散角及光束入射角成正比,即测距越长、光束发散角和入射角越大,光斑面积越大,该点的点位精度越低,反之则越高,这与人们的直观印象是相符的。光束入射角的大小主要是由被扫描物体外观形状决定的,因此通过引入光束入射角,可以将被扫描物体外观形状等因素对扫描精度的影响统一地以数学的方式表达出来,为后续的定量分析建立了理论基础。
由式(7)光斑面积可推得光斑的直径为

理想情况下,仪器测得的某点应该位于光束中线在光斑上所对应的位置;而实际上点的实际位置可以在光斑中的任意地方[1]。因此,光斑面积越大,点位的不确定性越大,相应的点位误差也越大;反之,光斑面积越集中,所引起的点位不确定性越小,相应的点位误差越小。又有Glennie等[2]对LIDAR激光光束的反射能量进行研究,结果表明光束的反射能量分布服从高斯分布,即正态分布,如图4所示。因此,由正态分布的性质,根据3σ原则,可将光斑大小引起的点位误差定义为

式中:σq表示光斑大小引起的点位误差,D为光斑直径。由于光束的反射能量分布服从正态分布,而正态分布具有3σ准则,即点位的可能位置几乎全部集中在(-3σ,+3σ)之间,因此光斑大小引起的点位误差可以根据上述原理推出。
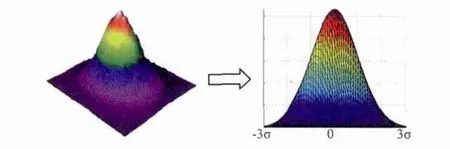
图4 激光光束反射能量分布Fig.4 Reflected energy distribution of laser beam
又由式(8)光斑直径表达式,最终可得被扫描物体外观形状等因素对扫描精度影响的定量表达式为

通过式(10),可以定量评价被扫描物体外观形状等因素对扫描精度的影响程度。由此评价模型可知,进行实际扫描测量时,应该尽量减少观测距离以及选择理想的观测位置,避免激光光束在被扫描物体表面形成较大的入射角度,以提高扫描所得的点云数据的质量。
将式(10)结合式(3)传统的单点定位精度模型,最终得到本文提出的顾及光束入射角的新的点位精度评定模型为

新的点位精度评定模型增加了被扫描物体的反射特性所引起误差对单点定位精度的影响,与传统的单点定位精度模型相比,其对点云数据的质量评价更为全面、合理。
3 实验结果分析
式(11)给出了新的点位精度评定模型,该模型同时顾及了测距值、测角值、仪器测距、测角精度以及被扫描物体的反射特性等因素,与传统的单点定位精度模型相比,其精度评定更为精确、合理,能够较为全面地对扫描所得的点云数据进行质量评价。为了检验该模型的可行性,本文设计如下实验进行验证。
首先使用Riegl VZ-400三维激光扫描仪获取一规则表面物体的点云数据,对点云中每点使用式(11)给出的新的点位精度评定模型进行计算,其中光束发散角及仪器测距精度、测角精度可通过查询Riegl VZ-400仪器技术参数可得(ε=300 urad,σθ=σφ=0.000 5°,σρ=5 mm)。
将最终按式(11)计算所得的各点点位精度按一定区间分别使用不同的颜色由高到低展绘出来,结果如图5所示。
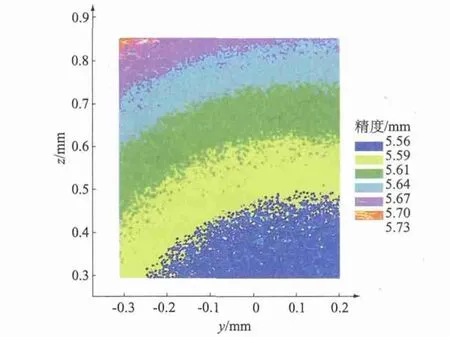
图5 规则物体点位精度等级(局部)Fig.5 Distribution of point accuracy of regular object(Partial)
由图5可见,点位精度由高到低依次排列,这是由于被扫描物体表面较为规则,点位精度主要受测距值及竖直角影响,测距越长,竖直角越大,点位精度越低,反之点位精度越高。
实验再使用Riegl VZ-400三维激光扫描仪获取同一物体的点云数据,所不同的是在物体表面点位精度较低的位置设置一如图6所示的稍微隆起的倒V形装置,同样使用式(11)给出的新的点位精度评定模型计算各点精度,其不同精度分别使用不同的颜色展绘,结果如图7所示。
图6 倒V形装置Fig.6 Inverted V-shaped device
由图7可见,由于上述装置改变了被扫描物体的外观形状,从而改变了光束入射角,点位精度也随之改变,具体情况为:装置的整个①面及②面的大半部分使得光束入射角较原物体表面减小,而测距值及竖直角几乎没有变化,因此点位精度提高;而②面的后半部分使得光束入射角较原物体表面增大,测距值及竖直角同样几乎没有变化,因此点位精度降低。上述结果可从图中装置颜色与周围颜色的差异较为直观地显示出来。通过图5和图7的对比,证明了本文提出的顾及光束入射角的点位精度评定模型是正确的,具有较高的可行性。
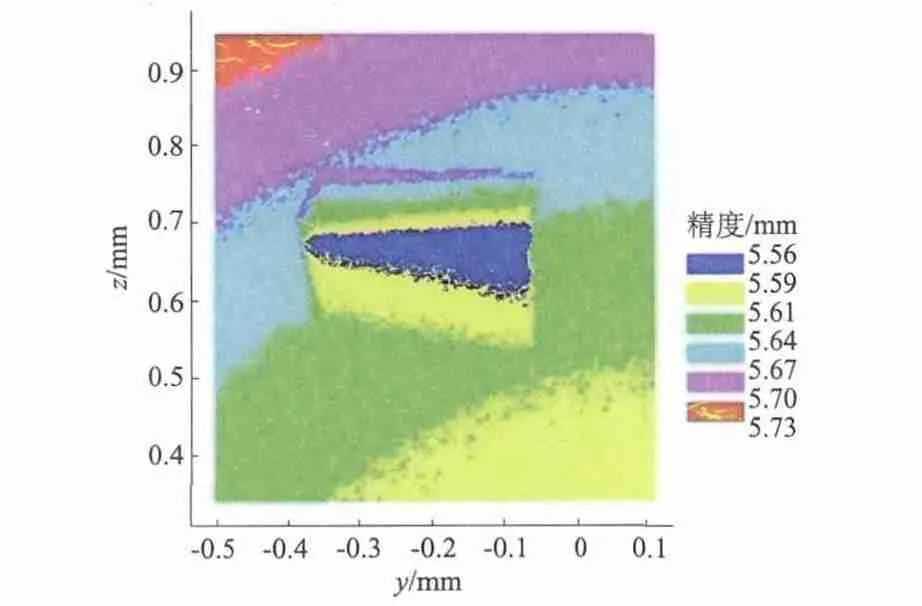
图7 不规则物体点位精度等级Fig.7 Distribution of point accuracy of irregular object
4 结论
本文从目标物体的外观形状对扫描精度的影响入手,提出了顾及光束入射角的点位精度评定模型,并通过实验验证了该模型的正确性及可行性。
与传统的单点定位精度模型相比,本文所建立模型精度评定更为精确、合理,使用该模型能够较为全面地对扫描所得的点云数据进行质量评价,评价结果具有较高的可信度,能为实际工程应用提供精确的理论依据及扫描时应注意的事项或技巧,以保证测量精度符合工程要求。
[1]LICHTI D D,GORDON SJ.Error Propagation in Directly Georeferenced Terrestrial Laser Scanner Point Clouds for Cultural Heritage Recording[C]∥Proceedings of FIG Working Week,Athens,Greece,May 22- 27,2004:22-27.
[2]GLENNIE C.Rigorous 3D Error Analysis of Kinematic Scanning LIDAR Systems[J].Journal of Applied Geodesy,2007,1(3):147-157.
[3]RESHETYUK Y.Self-calibration and Direct Georeferencing in Terrestrial Laser Scanning[D].Sweden:Royal Institute of Technology,2009.
[4]PAULY M,MITRA N J,GUIBAS L.Uncertainty and Variability in Point Cloud Surface Data[C]∥Proceedings of the Symposium on Point- based Graphics.ETH,Zurich,Switzerland,June 2-4,2004:77-84.
[5]MARK P.Point Primitives for Interactive Modeling and Processing of 3D Geometry[D].Germany:Diplom Informatiker University,2003.
[6]SCHAER P,SKALOUD J,LANDTWING S,et al.Accuracy Estimation for Laser Point Cloud Including Scanning Geometry[C]∥Proceedings of the 5th International Symposium on Mobile Mapping Technology(MMT2007),Padua,Italy.May 29-31,2007.
[7]SOUDARISSANANE S,VAN REE J,BUCKSCH A,et al.Error Budget of Terrestrial Laser Scanning:Influence of the Incidence Angle on the Scan Quality[C]∥Proceedings of the 3D-NordOst,2007:1-8.