单孔腹腔镜灵活器械的现状及前景
2015-11-28作者朱皓阳董鼎辉任冯刚张晓刚吕毅
【作者】朱皓阳,董鼎辉,任冯刚,张晓刚,吕毅
1 西安交通大学第一附属医院 肝胆外科,西安市,710061
2 西安交通大学先进外科技术与工程研究所,西安市,710061
3 陕西省再生医学与外科工程技术研究中心,西安市,710061
单孔腹腔镜灵活器械的现状及前景
【作者】朱皓阳1,2,3,董鼎辉1,2,3,任冯刚1,2,3,张晓刚1,2,3,吕毅1,2,3
1 西安交通大学第一附属医院 肝胆外科,西安市,710061
2 西安交通大学先进外科技术与工程研究所,西安市,710061
3 陕西省再生医学与外科工程技术研究中心,西安市,710061
近年来单孔腹腔镜技术的出现推动了腔镜技术的发展,但器械拥堵、操作三角丢失等缺点严重阻碍该项技术的临床推广应用。单孔腹腔镜灵活器械的出现在很大程度上弥补上述缺陷,其理念是在器械末端增加腕式关节,从而形成操作三角,减少器械拥堵。但该项技术仍处于初级阶段,该文目的在于总结现有单孔腹腔镜灵活器械的特点与不足,为单孔腹腔镜灵活器械的改进提供资料,并展望单孔腹腔镜灵活器械的发展前景。
单孔腹腔镜技术;灵活;器械
0 引言
现代外科随着科技进步和人们对医疗水平要求的提高而不断发展和优化。微创外科(Minimally Invasive Surgery, MIS ; Minimal Access Surgery, MAS)的发展正是外科医师针对“减少创伤、减轻痛苦”的外科原则和患者对手术“无痛、无疤、小创口”的要求而进行探索的结果。从1985年微创外科概念的提出,到同年世界首例腹腔镜胆囊切除术[1],从1997年世界首例经脐单孔腹腔镜胆囊切除术[2],到2003年世界首例经阴道内镜胆囊切除术[3]和目前微创手术机器人平台的引入与整合[4],微创外科的发展可谓硕果累累,传统的腹腔镜胆囊切除术已经从最初的4孔、3孔逐渐向2孔甚至单孔过度,并最终出现了单孔腹腔镜手术(Lapar°-End°sc°pic Single-Site Surgery, LESS)以及经自然腔道内镜手术(Natural Orifice Transluminal End°sc°pic Surgery, NOTES)。这两种新型的微创技术,使得传统的MIS在一定程度上有所进步。但是,由于单孔腹腔镜技术仅有单一入腹通道,使用传统腹腔镜的刚性器械难免会造成器械拥堵,操作三角丢失等缺陷,加之经自然腔道操作后留有缝合困难的问题,使单孔腹腔镜技术难于推广,导致目前国内大多数医院仍在应用传统腹腔镜技术。近年来,单孔腹腔镜灵活器械的出现正是基于对上述问题的探索,它的出现将助力单孔腹腔镜技术的进一步推广应用。本文将回顾现有单孔腹腔镜灵活器械,描述其结构、功能、硬件参数,并展望单孔腹腔镜灵活器械的发展前景。
1 商品化的单孔腹腔镜灵活器械
与传统腹腔镜手术相比,单孔腹腔镜手术最大的特点和难点在于“单孔”,即所有腹腔镜器械从单一皮肤切口通过。单一切口造成的空间狭小、器械拥堵在所难免,因而给外科医生的操作带来诸多不便。研制单孔腹腔镜灵活器械的主要目的是为解决上述问题。
单孔腹腔镜灵活器械着重强调灵活,与传统刚性腹腔镜器械相比,其灵活之处在于有特殊关节结构,可使器械效应末端弯曲、转动[5]。单孔腹腔镜灵活器械按结构分为单孔腔镜柔性器械(又称预弯曲器械)和单孔腹腔镜关节器械(又称可弯曲器械)。预弯曲器械常需要提前设有配套的戳卡;可弯曲器械可通过普通戳卡,因而应用更广泛。本文主要介绍几种现有单孔腹腔镜可弯曲器械。
1.1RealHand(TM) HD
RealHand高度灵巧腹腔镜设备(N°vare外科系统公司),由机械设计工程师Dantiz[6]在2006年设计,是一种高度灵巧的手持式腹腔镜操作器械。 RealHand意译为“灵巧的手”,它能在很大程度上镜像外科医生双手的运动。该器械有7个自由度,关节末端可以朝各方向弯曲、活动。Realhand关节的核心设计是几对线组(关节驱动方式为线组驱动)、两个关节和电缆。关节的运动方式:当一对线组的一端运动,势必牵动线组的另一端发生从动效应,继而牵引关节的弯曲和运动。该器械可弥补因传统腹腔镜器械破坏的手眼一致,到达灵活操作的目的。
该器械是高度灵活的双关节结构,操作末端拥有7个自由度,关节弯曲度可达90°,器械总长度约35 cm,直径约5 mm,设计符合人体工效学。经临床医生验证,正确使用RealHand可灵活、准确地进行抓取、牵拉、切割、缝合等操作。该器械于2008年正式投入临床应用,随后有多篇文献报道该器械可应用于肝胆外科[7]、泌尿外科和妇科,辅助外科医生经脐部或自然腔道[8-9]进行微创手术。详见图1~图3。

图1 设计者Dantiz正在演示Realhand操作Fig.1 The designer Dantiz is dem°nstrating °n Realhand

图2 Realhand钳夹子宫角Fig.2 Realhand clamps the uterine h°rn
1.2柳叶刀可腕转手术器械
柳叶刀可腕转微创手术器械(宁波柳叶刀医疗科技有限公司)是我国自主研发的腕式可弯曲腹腔镜手术器械[10]。该器械的“腕转”功能是参照并还原人类手部腕关节的转腕动作,器械末端具有7个自由度,并可灵活的旋转并弯曲,以抵达普通腔镜器械难以抵达的复杂解剖部位,见图4。

图3 Realhand整体外观图,图中可见该器械为双关节Fig.3 The °verall appearance °f Realhand, the figure sh°ws that the instrument is d°uble-j°inted
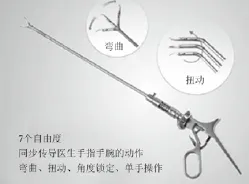
图4 柳叶刀可腕转器械大体观Fig.4 The °verall appearance °f wrist r°tati°n instrument
柳叶刀可腕转手术器械的核心设计是由关节、传动轴组成的关节传动装置,传动轴与定滑轮协作完成器械末端的弯曲等动作。柳叶刀可腕转微创手术器械包括:可腕转分离钳、卵圆钳、持针钳、电凝钳等手术钳类;可腕转组织剪、电凝勾;可弯曲吸引器。其中可腕转钳类、组织剪的长度为330 mm(标准型)/400 mm(加长型),直径为5 mm,可弯曲度达90°,器械末端可绕其轴心旋转180°,有双关节和单关节两种结构,关节起始部位至操作末端的距离(可弯曲部分的总长度)约78 mm/65 mm;可弯曲吸引器的长度为250 mm(标准型)/350 mm(加长型),参见图5。关节起始部位至操作末端的距离约58 mm/42 mm,其余参数与钳类、组织剪相同。该吸引器分为有侧孔和无侧孔两种,以满足不同的临床需求。
柳叶刀可腕转手术器械自2010年获得批准后,已投入临床应用。为了验证该器械的灵活性,宁波柳叶刀公司特意录制了该器械联合达芬奇手术机器人共同完成折纸飞机过程的视频[11]。参见图6。目前该公司仍在对这些器械进行改进,以赋予其更好的柔软性。
1.3Autonomy Laparo-Angle关节器械
Aut°n°my Lapar°-Angle柔性关节器械(CambridgeEnd°公司)是一系列包括组织剪、分离钳、电凝勾、持针器等灵活微创器械。这种柔性关节器械的设计要点除了关节传动的设计之外,器械整体还增加了一些改进装置。图7是该器械的手柄部分。Lapar°-Angle关节器械在传统器械的基础上增加了改进装置,主要包括:①轴向转动扭可使钳口精确转动;②角度锁定机构可在任意角度锁定钳口;③近段弯曲部可将手部动作传达至器械头端;④扳机环控制钳口的开、闭;⑤棘轮释放按钮:控制角度锁的锁定和解锁。

图5 柳叶刀公司可弯曲吸引管Fig.5 The bendable aspirat°r
图6 可腕转器械联合达芬奇机器人折飞机Fig.6 The instrument c°mbine with Da Vinci °rigami an airplane

图7 Aut°n°my Lapar°-Angle 柔性关节器械的手柄部分Fig.7 The handle °f Aut°n°my Lapar°-Angle flexible instrument
该系列器械的特点包括:①器械具有7个自由度;②器械头端可完全镜像医生手部动作。③器械头端可绕其轴心旋转360°,见图8;④该器械可同时完成多个动作,如向下弯曲的同时做旋转动作;各类器械参数有所不同:详细参数如下:①持针器和电凝勾的长度为330 mm(标准型)/440 mm(加长型),直径为5 mm,可弯曲度达90°,器械头端可旋转360°,关节起始部位至操作末端的距离约74 mm/51 mm;②Metzenbaum组织剪、Maryland分离钳和Fenestrated 肠钳(钳口长20 mm)的长度均为340 mm(标准型)/450 mm(加长型)关节起始部位至操作末端的距离约76 mm/53 mm;其余参数同前所述;肠钳(钳口长40 mm)的长度为360 mm(标准型)/470 mm(加长型),关节起始部位至操作末端的距离约80 mm/57 mm,余参数同前;在临床中,器械头端结构详见图9,Aut°n°my Lapar°-Angle的关节器械应用较广泛,已有多篇文献报道[12-13]。

图8 灵活器械头端可旋转360°械Fig.8 The tip °f the instrument can be r°tated 360°

图9 Aut°n°my Lapar°-Angle系列关节器械的头端Fig.9 The tips °f Aut°n°my Lapar°-Angle flexible instrument
1.4ECHELON FLEXTMPowered ENDOPATH®(内镜下组织吻合器)
ECHELON FLEXTM内镜下组织吻合器是强生公司2013年上市的产品,其大致结构类似于上述3种灵活器械,不同点是器械末端为组织吻合钉。图10为该吻合器的外观图,可见设备关节处设有关节保护套,这样不仅可减少关节处与组织产生的摩擦而且还能保证关节灵活转动。
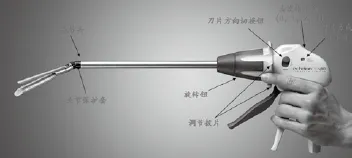
图10 ECHELON FLEXTMP°wered ENDOPATH®Stapler技术图及各部件作用Fig.10 The technical drawing °f ECHELON FLEXTMP°wered ENDOPATH®Stapler and the r°le °f the vari°us c°mp°nents
传统的腔镜下器械缝合困难重重,即使经验丰富的医生,也需花费大量的时间,有时甚至不能达到缝合要求。该器械的出现可简化缝合过程,灵活的在腔镜下进行组织吻合。吻合器总长度有280/340/440 mm三种,分别适用于肥胖病人、普通病人以及浅表器官操作;器械可通过直径为5 mm的戳卡通道,关节处可弯曲成15/30/45°;器械头端可旋转360°,组织吻合器(效应末端)的长度分为16/20/22 mm三种以满足不同组织厚度的吻合要求。关节起始部位至操作末端的距离约为176/136/112 mm。该吻合器的出现,在很大程度上降低了腹腔镜下缝合组织的难度,节省了手术时间,降低了并发症的发生[14]。
此外,强生公司旗下爱惜康公司生产的ENSEALTMG2 灵活组织密封器是2015年的一款最新产品[15]。基本设计与灵活组织吻合器相似,如图11所示。值得注意的是该密封器的手柄部位更符合人体工程学,可实现单手操作。该器械长度为350 mm(标准型)/450 mm(加长型),直径为5 mm,可弯曲度为110°,器械头端可旋转360°,关节起始部位至操作末端的距离约116 mm/91 mm。

图11 ENSEALTMG2 灵活组织密封器外观Fig.11 The appearance °f ENSEALTMG2 Articulating Tissue Sealers
1.5总结
以上介绍的4种单孔腹腔镜灵活器械,均为临床使用较多的器械。灵活器械的出现能有效的简化手术操作、提高单孔腹腔镜技术的效率。然而这些灵活器械仍有一些显著的缺点:①单孔腹腔镜灵活器械(无论可弯曲器械或预弯曲器械)较传统腔镜器械具有更高的自由度和灵活度、弥补操作三角丢失所带来的操作不便,但仍不能从根源处解决操作三角丢失的问题。②灵活器械因其操作末端具有“活动关节”,可以达到一定的灵活性甚至可达高度灵活,其“关节”驱动方式大多为线组驱动。线组驱动在增强灵活性的同时却降低了器械的刚性和操作的精确性。这有可能造成器械末端机械力的不足[16](如牵拉组织的拉力不足等)以及操作的精确度。③单孔腹腔镜技术较传统腔镜技术难度更大,灵活器械的引入会增加该项技术的学习曲线。熟练掌握这项技术、应用这些器械,可能会花费更多的时间和精力。
对比不同厂家生产的4种灵活器械,它们有类似的外部形态、硬件参数以及功能,但是其核心的“关节”构造是不完全相同的。近年来,这些灵活器械的使用越来越广泛,涉及普外科、肝胆外科、泌尿外科、妇产科等多种科室。本文除了介绍其设计要点和特点之外,又详细介绍这些器械的硬件参数。其目的一方面是为广大临床医师更深入的了解这些器械以便选择合适的器械,另一方面也为器械研究者提供一些信息参考。
当然,单孔腹腔镜灵活器械的种类远不止这4种,其中一些因设计缺陷或价格昂贵未能得以推广,也鲜有文献报道。例如Lapr°-AngIe(Cambridge) Dundee柔性关节器械[17]的设计与上述器械相似,但因其只能一次性使用,加工成本太高而难于临床推广;“直觉外科”公司专为达芬奇手术机器人系统设计的可弯曲器械一般在机器人辅助下完成操作,很少单独使用。
2 讨论与展望
单孔腹腔镜技术的开展,是外科发展进程中的一座里程碑。临床常用的经脐单孔腹腔镜手术不仅能达到微创、微痛、少并发症的优点,也能尽可能达到术后无疤痕的美容效果,从而受到广大患者的亲睐。国内外也有多个研究团队对单孔腹腔镜与传统腹腔镜技术进行对比研究,以证明单孔腹腔镜技术在某些方面确实具有优势。图12[18]显示的是某研究团队对比96例接受单孔腹腔镜胆囊切除术(SILC),和94例接受传统腹腔镜胆囊切除术(CLC)的临床手术结果进行比较。可见SILC组虽然手术时间更长,但术后疼痛和住院时间较CLC组缩短。所以单孔腹腔镜技术的发展和普及势在必行。
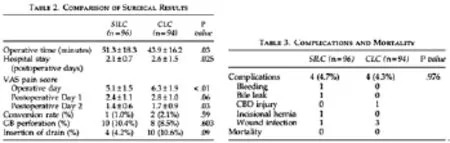
图12 SILC和CLC手术效果与并发症的对比[18]Fig.12 The c°mparis°n °f surgical results and c°mplicati°ns between SILC and CLC[18]
针对单孔腔镜技术专门设计的灵活器械,能简化手术操作,抵达到复杂的解剖部位,在一定程度上可弥补因单一手术切口而造成的器械拥堵、操作三角丢失 等缺陷。但单孔腹腔镜技术以及其灵活器械的发展仅处于初级、探索阶段,仍存在较多的技术和器械方面的缺陷,也未能普及。
未来,单孔腹腔镜灵活器械的发展还需要从以下几个方面促进:①改进操作三角:目前单孔腹腔镜技术及其灵活器械的应用在一定程度上提高了器械的自由度,增加了操作的灵活性,减少了创口数目,达到了微创化的要求。但是,这些器械的出现并未从根源上解决单孔腹腔镜技术中操作三角丢失的问题。而操作三角在腔镜手术中又是至关重要的,所以单孔腹腔镜器械在腹腔中如何形成操作三角仍是其日后发展的重心。②设计特定科室专用器械:本文详细介绍现存的单孔腹腔镜灵活器械的参数信息,发现其具有相似的直径、弯曲度、旋转度、自由度。而不同科室腔镜手术操作也不相同。器官的解剖结构、位置等差异,使得最合适的器械长度、弯曲度、自由度等参数要求各不相同。未来的器械发展方向应按专科设计,即设计针对特定科室、特定手术操作的特有器械。这样器械能更具针对性、更大程度上符合手术要求、减少不必要的工艺浪费。③增加灵活性、改进人体功效学:现有的灵活器械比传统刚性器械更灵活、柔软,甚至可以镜像医生双手操作,但仍不能抵达某些狭小、复杂的解剖部位,也不能完成某些精细的操作。在今后的研发过程中,可以增加器械的关节数目、增强灵活度,使器械能弯曲成正常人手腕达不到的角度。手柄部分设计的要更符合人体工效学,医生使用时更加得心应手,也能减少因长时间操作而造成的疲劳。④结合特定入路系统或机器人:在使用单孔腹腔镜器械时,均配备有特定的戳卡。常见的有:Gelp°rt腹腔镜操作系统、Airseal系统、 Uni-X单孔腹腔镜操作系统、R-P°rt/TriP°rt/QuadP°r、End°C°ne等系统[5,19]。这些戳卡不仅可以提供伤口支撑和器械的通道,还能保证手术的顺利进行。当然我们也可以设计出针对特定器械的专用戳卡和能通过预弯曲器械的戳卡使得器械操作更加顺畅。除此之外,结合机器人操作平台[20]也是一个具有前景的方向。目前的机器人系统主要有达芬奇系统和宙斯系统等主从系统机器人,机械臂的操作具有比人手更精确、操作末端不颤动、长时间操作不疲累等优点。若能联合专用的机械臂代替人手操作器械,必能是的单孔腹腔镜技术达到新的高度。
单孔腹腔镜技术虽然在一定程度上有所推广,但目前多数医院仍在在使用传统的腹腔镜技术。单孔腹腔镜灵活器械的发展必能推动和帮助该项技术的普及,给更多患者带来福音,也必然为现代外科添上举足轻重的一笔。
[1] Jr Reyn°lds W. The first lapar°sc°pic ch°lecystect°my[J]. JSLS, 2001.5(1): 89-94.
[2] Navarra G, P°zza E, Occhi°n°relli S, et al. One-w°und lapar°sc°pic ch°lecystect°my[J].Br J Surg, 1997. 84(5): 695.
[3] Z°rr°n R, Filgueiras M, Maggi°ni LC, et al. NOTES.Transvaginal ch°lecystect°my: rep°rt °f the first case[J]. Surg Inn°v, 2007, 14(4): 279-283.
[4] Vitiell° V, Lee S L, Cundy TP, et al. Emerging r°b°tic platf°rms f°r minimally invasive surgery[J].IEEE Rev Bi°med Eng, 2013, (6): 111-126.
[5] 程小丽, 宋成利. 单孔腹腔镜手术器械研究的最新进展[J].中国组织工程研究与临床康复, 2011, 25: 4669-4674.
[6] D°ug Sm°ck. David Danitz Realhand高灵巧度(HD)设备彻底变革腹腔镜手术[J]. 工业设计, 2008, 12:33.
[7] N°vare Surgical Systems, Inc. Ann°unces First Transvaginal NOTES Gallbladder Rem°vals Using RealHand(TM) HD Instruments[EB/OL]. http://www.bi°space.c°m/News/n°varesurgical-systems-inc-ann°unces-first/695679/13/2007
[8] Tan M, Prufer N, Chin°s°rnvatana N, et al. Applicati°n °f natural °rifice transluminal end°sc°pic surgery (NOTES) instrumentati°n t° the end°larynx[J]. Ann Ot°l Rhin°l Laryng°l, 2012, 121(7): 435-441.
[9] H°rgan S, Cullen JP, Talamini MA, et al. Natural °rifice surgery: initial clinical experience[J]. Surg End°sc, 2009, 23(7): 1512-1518.
[10] 王俊. 一种可弯曲微创器械[P]. 中国, CN201551345U, 2010-08-18.
[11] 柳叶刀医疗科技有限公司[R/OL]. http://v.y°uku.c°m/v_sh°w/ id_XNDkzNDk5NTI0.html.
[12] Ohki T,Washi° K.Clinical experience °f the articulating needleh°lder f°r c°mpletely vide°-assisted ,th°rac°sc°pic surgery[J]. Ky°bu Geka, 2013, 66(13): 1149-1151.
[13] K°mmu SS, Rane A. Devices f°r lapar°end°sc°pic single-site surgery in ur°l°gy[J].Expert Rev Med Devices, 2009. 6(1): 95-103.
[14] Ikeda T, Akah°shi T, Kawanaka H, et al. Optimum hepatic parenchymal dissecti°n t° prevent bile leak: a c°mparative study using electr°surgical and stapling devices in swine[J]. Fuku°ka Igaku Zasshi, 2013, 104(12): 507-514.
[15] Ethic°n, Inc.ethic°n-pr°duct catal°g february 2015[R/OL]. http:// www.ethic°n.c°m/sites/default/files/managed-d°cuments/ethic°npr°ductcatal°g-may2015l.pdf.
[16] Je°ng CW, Kim SH, Kim HT, et al. Insufficient j°int f°rces °f first-generati°n articulating instruments f°r lapar°end°sc°pic single-site surgery[J].Surg Inn°v, 2013, 20(5): 466-470.
[17] Tim°thy Graham Frank.Medical instrument f°r grasping an °bject, in particular a needle h°lder[P].US patent:US 8882799B2, 2104-11-11.
[18] Kim BS,Kim KC,Ch°i YB. A c°mparis°n between singleincisi°n and c°nventi°nal lapar°sc°pic ch°lecystect°my[J]. J Lapar°end°sc Adv Surg Tech A, 2012. 22(5): 443-447.
[19] 韦周吉, 吴东波, 吴鸿根. 单孔腹腔镜手术操作平台及其器械的研究进展[J]. 中国内镜杂志, 2013, (6): 597-602.
[20] Yeung BP, G°urlay T. A technical review °f flexible end°sc°pic multitasking platf°rms[J]. Int J Surg, 2012, 10(7): 345-354.
The Current Status and Prospects of Single-Port Laparoscopic Flexible Instrument in Surgery
【 Writers 】ZHU Haoyang1,2,3, DONG Dinghui1,2,3, REN Fenggang1,2,3, ZHANG Xiaogang1,2,3, LV Yi1,2,3
1 Department of Hepatobiliary Surgery, First Affiliated Hospital, Xi’an Jiaotong University, Xi’an, 710061
2 XJTU Research Institute of Advanced Surgical Technology and Engineering, Xi’an Jiaotong University, Xi’an ,710061
3 Regenerative Medicine and Surgery Engineering Research Center of Shaanxi Province, Xi’an, 710061
【 Abstract 】In recent years, the emergence of single-port laparoscopic technology promoted the development of the technology of laparoscopy, but deficiencies like equipment conflict or lack of triangulation severely hampered the clinical application of this technology. The appearance of single-port laparoscopic flexible instruments makes up for those deficiencies to a great extent. The element is to add a wrist joint to the tip of the instrument to form triangulation and reduce equipment conflict. But this technique is still in an early stage of development. The purpose of this article is to summarize the characteristics and problems of existing flexible single-port laparoscopic instruments, and to provide information for the further improvement, finally the future development was expected.
single-port laparoscopic technology, flexible, instrument
R656
A
10.3969/j.issn.1671-7104.2015.06.013
1671-7104(2015)06-0437-05
2015-07-09
国家自然科学基金科学仪器专项项目(81127005)
吕毅,教授,博导,E-mail: luyi169@126.c°m