平面带缓和曲线的圆曲线高效测设方法的探究
2015-11-27邓绍云
邓绍云
(1.新疆应用职业技术学院,新疆 奎屯 833200;2.新疆永振建筑安装工程有限公司,新疆 乌苏 833000;3.新疆北疆建筑规划研究院,新疆 奎屯 833200)
0 引 言
平面带缓和曲线的圆曲线是线路工程中最为典型的曲线单元,很多线路曲线就是由众多不同曲率、不同长度的带缓和曲线的圆曲线单元组成,只不过各个组成单元的特性要素不同而已。故平面带缓和曲线的圆曲线的测设是线路工程建设过程中的典型工作也是关键性工作,探究其高效的测设方法具有很重要的工程意义。
1 研究基础与问题
平面带缓和曲线的圆曲线包括三个部分:第一个部分为一条直线如图1所示的左侧Z点与A(ZH)点这段直线;第二段为缓和曲线段,如图1左侧中间从点A(ZH)到点C(HY);第三段为圆曲线段,如图1中所示点C(HY)到点D(YH),其中点为圆曲线中点,也为平面带缓和曲线的圆曲线的中点,因为平面带缓和曲线的圆曲线一般是左右对称,其圆心为点O,其半径为R。如图1所示,左右直线段的延长线的交点为JD点,它们的夹角为平面带缓和曲线的圆曲线的偏角α,偏角α 值越小,则平面带缓和曲线的圆曲线偏转越平稳,越有利于车辆的转弯运动。
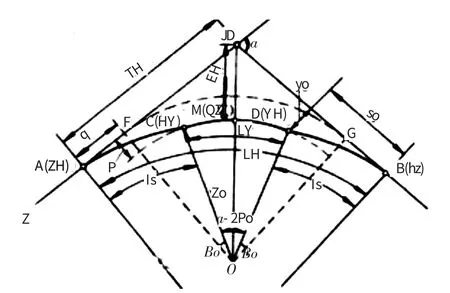
图1 平面带缓和曲线的圆曲线示意图
平面带缓和曲线的圆曲线定义简单,其数学涵义明确,但工程测量实践中要按照该定义和数学涵义进行实际测设极为困难。从图1可见,平面带缓和曲线的圆曲线的测设,分为三个部分:①平面直线段的测设;②平面缓和曲线段的测设;③平面圆曲线段的测设。其中的难点和重点在于平面缓和曲线段的测设。
由于平面缓和曲线段的测设极为困难,从而人们实际测设过程中,往往是运用逐渐逼近,基本相似的原理去进行测设的。首先表现在对于平面缓和曲线的数学定义在某种程度上的变通和近似,从而常有用平面回旋曲线、平面三次抛物曲线或平面双纽线等来近似接近。在进行带平面缓和曲线的圆曲线的工程测设过程中,常用的测设方法为偏角法。其测设的一般程序为:先选择方法,然后建立起坐标(一般为极坐标),接下来测设出带平面缓和曲线的几个关键点(即直线与缓和曲线的交点ZH、缓和曲线与直线的交点HZ、曲线中点即圆曲线中点QZ、缓和曲线与圆曲线的交点HY、圆曲线与缓和曲线的交点YH),再就是增测设一些细部点(根据要求所测设的里程桩点位)。一般工程实际中,除非地形、地貌和地物的客观限制外,工程设计中一般都会将平面带缓和曲线的圆曲线设计成为对称性的。所以只要知道其一半边的测设,然后根据对称性就可以将整个平面带缓和曲线的圆曲线测设完成。但教材和一些文献[2,3,4]方法极为复杂,让普通工程技术人员极难掌握,其公式极为复杂难记,从而实际测设放样过程中经常出错。故有必要探索研究高效的平面带缓和曲线的圆曲线的测设方法。
2 高效测设方法的探究
线路工程实际中,平面带缓和曲线的圆曲线测设放样工作就是要将该曲线上的诸多密集的点位,通过测设放样的手段,准确定位打下木桩,从而使得该曲线在工程建设实施后,能达到工程设计要求。
测设放样过程中必须根据工程地形、地貌和地物的实际情况以及施工单位的测设工具和技术水平等来决定测设方案的选定。本方法最好能适用于任何条件下的测设工作的顺利开展,故有必要具备一定的预备知识。
2.1 预备知识
如图2所示为直角坐标系经平移和旋转之后示意图,如图1所示,坐标系XOY经平移到点O'(X0,Y0),为新的坐标系X'O'Y',然后再逆时针旋转θ 角,从而成为最终的坐标系X"O'Y",则在最初坐标系XOY中的任意点M(Xm,Ym)在最终坐标系X"O'Y"的坐标为M(X"m,Y"m),根据数学知识[1]可以算得。
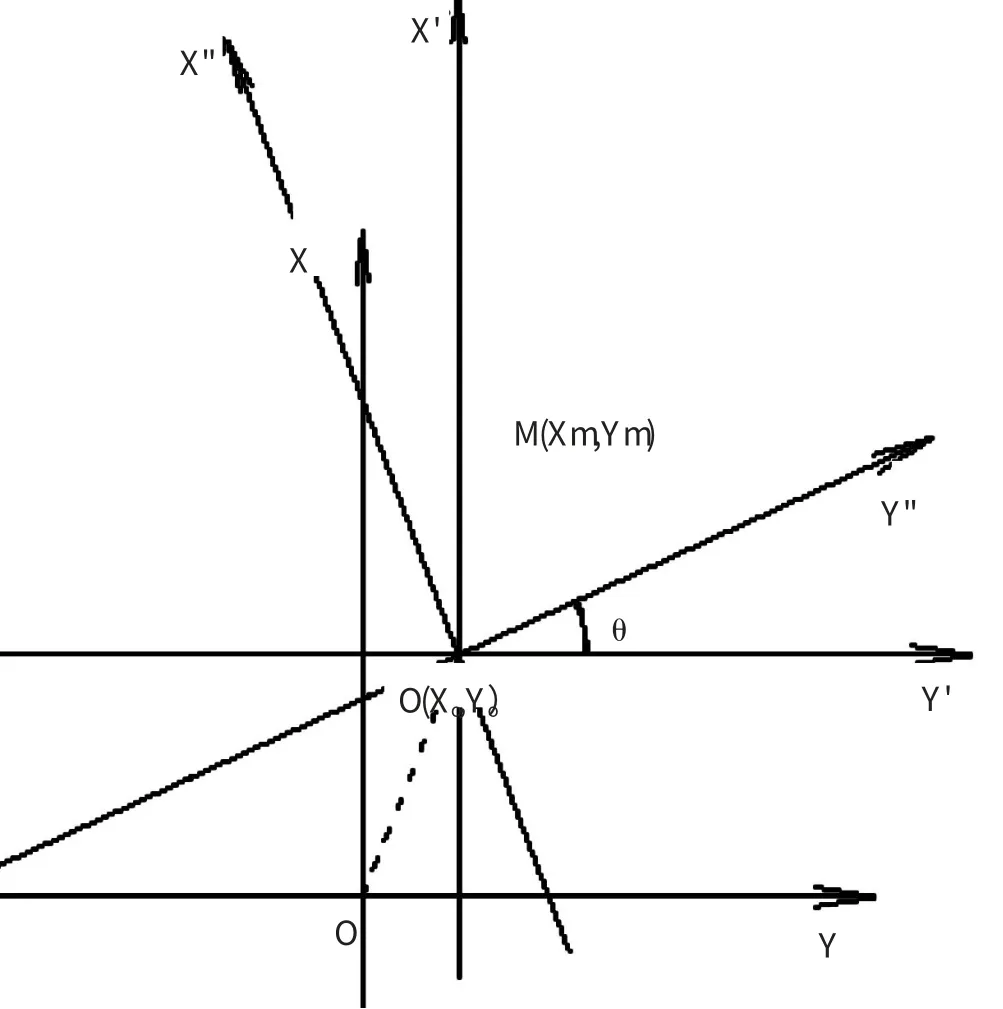
图2 坐标平移和旋转后示意图
从而有:Xm=X0+X'm=X o+X"mcosθ+Y"msinθ;Ym=Y0+Y'm=Y0+Y"mcosθ-X"msinθ
由于工程设计图纸一般都是给定的北京54坐标体系,从而对于极坐标和偏角坐标等都只是在工程测设放样中实际应用。其平移和旋转后坐标的计算原理相同,找到几何关系,进行换算。本方法将要求测设放样者能熟练进行坐标系平移和旋转的坐标运算能力,只有这样,才能根据测设过程中所遇到的实际情况,因地制宜选择测设方案。
2.2 测设程序与步骤
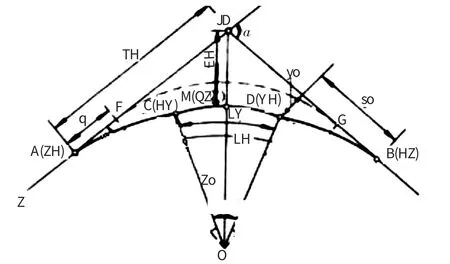
图3 直线段测设放样示意图
平面带缓和曲线的曲线的测设程序为:①首先根据实际情况选定合适的测设方案;②在工程设计图纸上找到带左右两条直线的交点JD,在JD点上架设仪器,根据坐标运算或偏角法确定并测设放样出A(ZH)、B(HZ)、圆心点O、曲线的中点QZ;③左直线段的测设放样;④圆曲线段的测设放样;⑤左边缓和曲线段的测设放样;⑥根据对称原理,将整个曲线的右边测设放样定位。在测设放样过程中,有必要通过坐标系的平移和旋转计算出这几个平面带缓和曲线的圆曲线关键点位JD、A(ZH)、B(HZ)、圆心点O、曲线的中点QZ、C(HY)、D(YH)的坐标(设计图纸一般给出绝对坐标值,且我国一般是北京54坐标值,必须明白北京54坐标系的知识)。其中,直线段的测设放样较容易,而圆曲线段的测设放样难度大些,而缓和曲线段的测设放样就显得极为困难和关键。
2.3 直线段的测设
如图3所示将平板仪或带水平度盘的水准仪或经纬仪或全站仪架设在点位JD,JD点的坐标一般工程设计图纸给定,可以通过GPS定位,或由其他给定已知点位测设确定。通过直线定向的方法来确定直线AZ方向,并沿该方向上间隔一定的小段距离密集打点打下木桩确定直线上各点的实际地面的位置。然后根据旋转法,逆时针旋转角度(90°-0.5α)测设放样出直线JDO方向,并由计算而得点JD到圆心O点的距离值而测设放样出圆心O点的地面位置。
2.4 圆曲线段的测设
当工程测设单位拥有较好的测设工具如全站议、GPS系统,且懂得坐标平移和旋转换算知识时,采用直角坐标测设放样法还是比较合适的。人们可以根据设计图纸,先测设出该圆曲线所在的圆心位置,然后在该处建立其适应的相对坐标系,将起点A与圆心点O(A、O两点的坐标一般设计图纸给定,且采用的是北京54坐标)的连线取作为相对坐标X轴的正向,如图2所示。根据前文坐标系的平移(原点平移到圆曲线圆心O点)和旋转(有向线段OA从O点的正北指向旋转θ 角度,逆时针旋转取正值或顺时针旋转取负值)代进公式进行计算,算出圆曲线上任意点M(Xm,Ym),然后将这些点的坐标输入全站议或GPS系统,从而得到测设放样成功。
这种办法只是计算较为复杂,当这些点位的坐标计算准确之后,其测设放样的速度和准确度就看所拥有的全站议或GPS系统的性能和测设放样者的认真程度。当然也可以采用极坐标测设法和偏角测设法进行测设放样,道理基本相同。

图4 平面圆曲线直角坐标测设法示意图
2.5 缓和曲线段的测设
如图5所示,以缓和曲线段与直线的交点ZH点位为极点,以直线的延伸方向为极轴,顺时针旋转角度θ 为正,缓和曲线上任意点M,其坐标为(θ,ρ(θ)),射线ZHM顺时针偏转一个微小的角度dθ,线段ZHM长度有个微增长dρ(θ),此时,缓和曲线弧段的长度定义为L(θ),任意点M(θ,ρ(θ))所对应的曲线曲率半径定义为R(θ),缓和曲线的总长定义为ΣL。
根据缓和曲线的定义可知:L(θ)×R(θ)=C=ΣL×R
此外,根据几何关系可以近似认为,当直线段ZHM偏一微小的角度dθ 后,M 点走到M'点,此时M'点的坐标为(θ+dθ,ρ(θ)+dρ(θ))。此时可以近似认为M与M'两点在同一圆曲线上,其圆半径为R(θ),弧线M M'长度近似为dρ(θ),弧线M M'所对应的圆周角近似为dθ,根据几何原理知道弧线M M'长度为dρ(θ)=R(θ)×dθ;同时又因为dρ(θ)=d L(θ)。
所以,L(θ)×d L(θ)=ΣL×R×dθ;解该微分方程得:

图5 平面缓和曲线偏角法测设示意图
在这测设放样的过程中,ZH点到M 点的距离的控制可以通过将经纬仪的望远镜调制在水平状态而卡住让其在竖直平面内不得动弹,通过读水平标尺的经纬仪目镜十字丝上丝与下丝读数之差值乘以100即为该距离的方法来达到目的[2]。
3 结论与展望
本文在参考前人的一些研究基础上,本着实际高效的测设放样原则,将带缓和曲线的圆曲线的测设放样工作分成三个阶段进行,直线段和圆曲线段均可采用直角坐标法或极坐标法或偏角法,而对于测设难度很大的缓和曲线段的测设则选择偏角法,运用较为简单的测量仪器:经纬仪或带水平度盘的水准仪或平板仪架设在直线与缓和曲线的交点上,建立其极坐标测量体系,通过对平面缓和曲线的定义理解和建立合理的微分方程,并正确求解出所要测设放样的曲线上的任意点到仪器架设点的距离,也即求解出缓和曲线上任意所要测设放样点的极坐标,进行测设放样。该方法很容易理解,使得测设放样也较容易顺利进行,所用工具也较为原始和普通,具有一定的创新性。该方法克服了前人的繁琐复杂、公式难记等缺陷,能为普通工程测量技术人员所掌握,值得推荐。
[1]侯风波.高等数学(第三版)[M].北京:高等教育出版社,2010.
[2]王金玲.工程测量([M].武汉:武汉大学出版社,2013.
[3]张凤兰.测设带缓和曲线圆曲线的一种方法[J].东北公路,2001(4).
[4]吴英.带复合型缓和曲线的圆曲线边桩坐标计算[J].中国公路工程,1998(1).
