高速铁路CP0框架控制网数据处理模式与方法研究
2015-11-24周东卫
周东卫
(中铁第一勘察设计院集团有限公司,西安 710043)
高速铁路CP0框架控制网数据处理模式与方法研究
周东卫
(中铁第一勘察设计院集团有限公司,西安 710043)
框架控制网(CP0)作为高速铁路平面控制测量的起算基准,必须确保其具有较高的精度、可靠性和稳定性。影响CP0最终定位结果的因素较多,如不能正确考虑并处理这些因素,将造成最终定位结果出现较大偏差无法满足精度要求。结合相关项目的测量数据及实践经验,对CP0数据处理模式与方法进行研究分析与总结归纳,在此基础上就基线解算系统误差的消除和削弱,基线解算方案和软件的合理选择,如何进行框架基准的统一与转换,以及基线网平差等方面提出一些原则和方法,不仅解决了CP0框架基准的统一问题,也提高了基线解算的可靠性和精度。
高速铁路;框架控制网;基准统一;解算方案;系统误差
1 概述
高速铁路线路长、地区跨越幅度大且平面控制网沿线路呈带状布设,为了控制带状控制网的横向摆动,并为平面控制测量提供统一的起算基准,实现勘察设计、施工建设和运营维护各阶段控制网的“三网合一”,高速铁路采用GPS精密定位测量技术,按一定间距(50~100 km)布设建立了框架控制网(CP0)。CP0控制点布设间距为50~100 km,与国际IGS参考站或国家CGCS2000 A、B级GPS点进行联测,采用国外专业的长基线计算软件(如GAMIT/GLOBK、BERNESE等)进行基线解算和网平差计算,数据处理精度要求较高[1]。影响CP0最终定位精度的因素较多,主要有卫星星历误差、对流层折射误差、基准点初始误差、采用的解算软件、采用的解算方案、框架基准的统一与转换方法、基线网平差方法等。在CP0数据处理中如不能正确考虑并处理这些因素,将造成最终定位结果出现偏差无法满足精度要求。结合在CP0数据处理中的实践经验,对基线解算和网平差的影响因素与解算策略进行研究分析与总结归纳,得出了一些有益的结论。
2 基线解算影响因素分析
2.1 卫星星历误差对基线解算的影响
基线解算时应根据网尺度的大小、基线的长短来决定采用哪种星历。框架控制网中CP0框架点布设间距一般为50~100 km,与IGS参考站或国家A、B级点联测的距离较远基线较长(某些情况>1 000 km)。为了减少星历误差对基线解算的影响,解算过程中应采用IGS综合最终星历,考虑到最终星历的滞后时间为11 d,当最终星历的滞后时间无法满足计算要求时,也可采用IGR快速星历代替。不同精度的卫星星历误差引起的基线相对误差和绝对误差见表1。
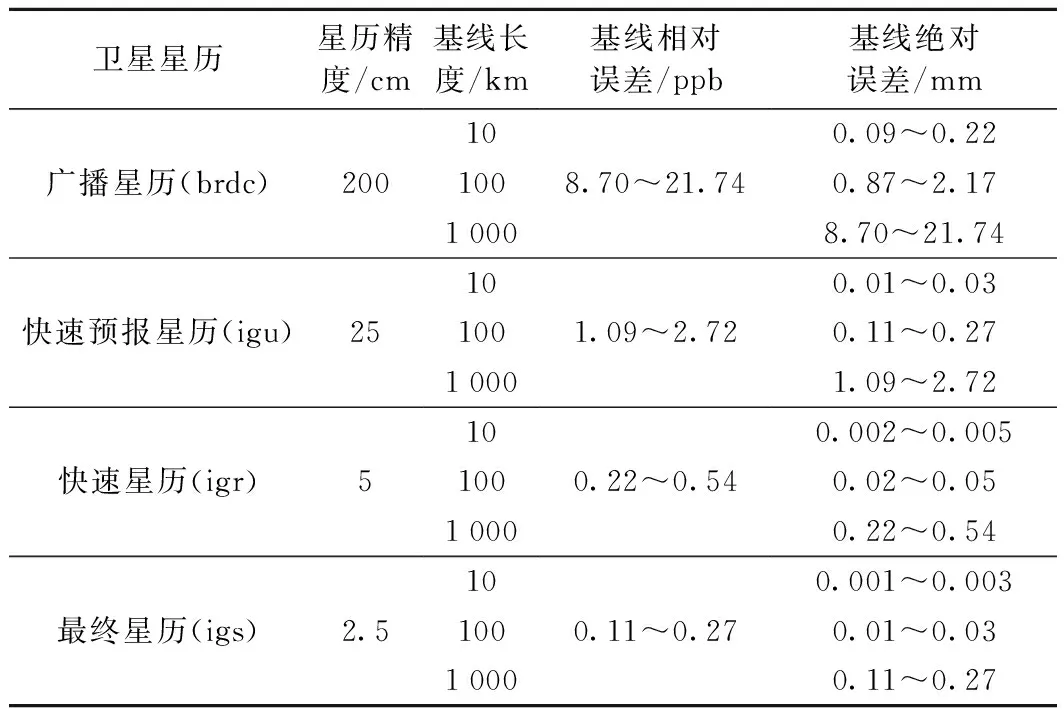
表1 卫星星历误差对基线解算的影响
此外,不同时期的星历和不同机构发布的星历,也存在一定的系统误差,同期或多期基线处理时应尽可能采用同一种类型的星历,最好采用多个机构共同融合计算发布的IGS综合星历;同时在基线处理时也应顾及到星历误差对基线的影响,在基线解算时应采用强约束高精度地面基准站坐标并同时松弛轨道的方案,将卫星轨道误差的影响降到最小。
2.2 对流层折射误差对基线解算的影响
对流层折射误差不仅影响位置(特别是高程)精度,甚至会影响模糊度的解算,因此CP0基线解算时必须顾及对流层折射误差的改正精度,其改正一般通过选择适宜的天顶对流层延迟模型及映射函数,并对天顶对流层湿延迟进行参数估计来实现的。考虑到天顶对流层湿延迟是引起对流层折射误差的主要来源,且难于建立精确的模型[2],GAMIT 软件中通常采用PWL分段线性法,该方法是随机过程的一种简化,将整个观测时段分为若干个子区间,每个区间各引入1个参数,在每个区间内,各测站天顶方向的对流层湿延迟折射随时间呈线性变化。窗口的选择(即决定每隔多长时间间隔附加1个天顶对流层湿延迟参数)是PWL分段线性法的关键所在。
利用GAMIT 10.40软件,采用PWL分段线性法分析处理了多条铁路客运专线的CP0观测数据,在其他参数设置均相同时,采取每个测站分别不附加、附加2个、4个、5个、7个、13个天顶对流层湿延迟参数6种不同方案,比较了不同天顶对流层湿延迟参数选取方法对基线解算结果的影响。表2为某客运专线不同试验方案解算结果站心地平坐标系下的基线向量和边长的重复率。基线重复率[3]由常数部分和系数部分组成,常数部分单位为mm,系数部分基线长度L的单位为m。图1和图2为不同试验方案三维约束平差得到的各基线三维向量的残差(限于篇幅仅列出其中2条)和点位绝对精度。

表2 不同方案解算结果的基线重复率
通过以上工程测量数据研究,结果表明:(1)天顶对流层湿延迟参数估计个数的不同,对基线解算产生的误差主要体现在U分量上,U分量误差约为水平位置误差的2~3倍;(2)每个测站每4~6 h时间间隔估计一个天顶对流层湿延迟参数效果较好,能真实反映出对流层折射影响随时间变化的趋势,从而提高基线解的精度;(3)天顶对流层湿延迟参数估计个数不同,使得大多数基线在尺度上呈现出系统性差异,这说明了对流层折射残余误差对CP0框架控制网的确有尺度上的影响,并主要体现在尺度误差的比例部分上。从表2可以看出,对于CP0中长基线(50~100 km)构成的GPS网来说,其影响约为0.50×10-8(0.25~0.50 mm)。
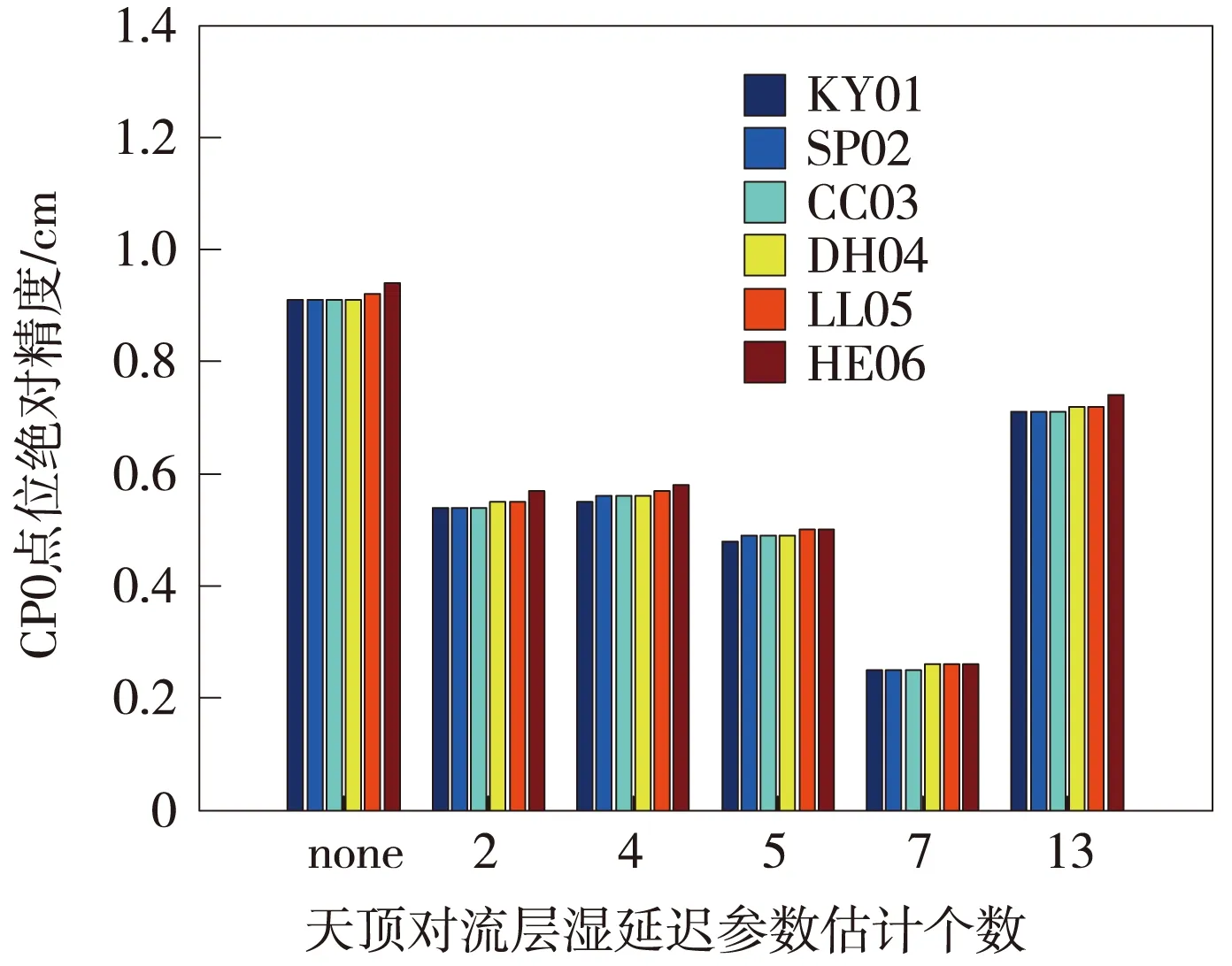
图2 不同方案约束平差点位绝对精度
2.3 基准点坐标误差对基线解算的影响
在CP0框架控制网基线解算过程中,需要将IGS参考站或CGCS2000国家点作为起算点,当起算点坐标出现误差或兼容性较差时将导致整个CP0框架控制网基线向量解产生系统性误差。试验表明,这种系统误差主要反映整网基线向量的系统性旋转和尺度的变化[4]。
利用GAMIT 10.40软件分析处理了多条铁路客运专线的CP0观测数据,框架基准采用目前精度最高的ITRF2008参考框架,参考历元为2 000.0。在GAMIT表文件sittbl.中对各控制点的测站三维坐标约束量进行设置,将IGS参考站作为起算点,约束量分别设置为0.03,0.03,0.05 m。在参数设置均相同时,采取IGS起算点坐标不加误差、各方向加2 cm、10 cm、20 cm、2 m、20 m的误差6种不同方案,比较了起算点不同坐标精度对基线解算结果的影响。表3为某客运专线不同试验方案解算结果三维地心坐标系下的基线向量和边长的重复率。基线重复率由常数部分和系数部分组成,常数部分单位为mm,系数部分基线长度L的单位为m。图3是不同方案的基线分量较差(限于篇幅仅列出其中2条)。基线分量较差计算将方案一起算点无误差时的基线解算结果作为真值,分别得到各方案与方案一的各基线分量差值。由于起算点坐标误差达到20 m时,基线解算结果不可靠,基线结果失去了参考价值,因此不再分析此方案与方案一的基线分量较差。
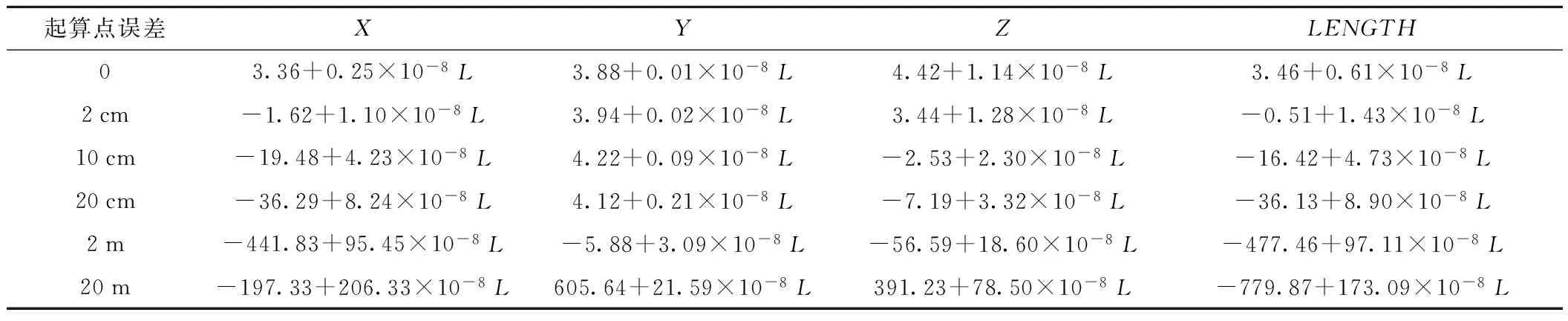
表3 不同方案解算结果的基线重复率

图3 不同方案基线分量较差
通过以上工程测量数据研究,结果表明:(1)使用GAMIT软件进行CP0框架控制网解算时必须严格控制起算点坐标的误差,起算点点位坐标精度最好控制在10 cm之内;(2)当起算点坐标误差达到20 cm时,各基线分量的解算结果的精度在毫米级的量级;(3)当起算点坐标误差达到2 m时,基线解算结果不可靠,不满足高精度解算要求。
为了确保起算点点位坐标精度满足基线解算的要求,IGS参考站测站坐标推荐使用IERS国际组织提供的基于某一参考框架参考历元的ITRF三维地心坐标(下载地址:http://itrf.ensg.ign.fr);对于多个国际组织(如IERS、IGS、SOPAC、JPL)均能提供坐标和速率的IGS参考站,应尽量收集2个或2个以上国际组织的数据对比分析,选择差异较小的参考站作为基准起算点,并优先采用最新的参考框架坐标和速率,在此基础上选用同一国际组织提供的地面基准站坐标和速率作为基线解算的强约束点;若需要其他框架和历元下的坐标,可以通过框架转换模型向前反推得到。
3 基线解算方案与软件
CP0框架控制网进行基线解算时,基线解算策略至关重要。即使使用相同的软件,基线解算策略选择不恰当或几期基线解算采用的策略不同,也会带来较大的系统误差,如采用的卫星星历精度、电离层和对流层改正模型的选取方式、基准站坐标和卫星轨道的固定或松弛约束程度、力模型的选择、周跳修复的方法等,这些因素都将造成基线解在尺度和方向上的系统误差。为了避免不同解算方案对基线所带来的系统误差,对于不同期的数据应严格采用同一软件同一解算方案进行处理。采用的解算方案应特别注意框架控制网的尺度、基准站坐标和星历的精度,并采用高精度基准站并强约束其坐标和松弛轨道的方案,其约束量应根据其先验精度来确定,既不应太紧,又不应太松。IGS基准站和星历的约束量大小是否合适可用解算结果的参数改正数来判断,其判断标准是基准站和星历的参数改正数应不大于其约束量的2倍。
CP0框架控制网属于中长基线GPS网,基线解算时需采用高精度解算软件,国内一般采用GAMIT 和BERNESE进行处理。虽然这两款软件均以双差相位观测值作为基本解算数据,但由于其采用的模型及数据处理方式等因素的不同,将造成基线解算结果的系统性差异。因此,施工建设和运营维护期间CP0控制网的复测维护应采用与勘测设计期间相同的基线解算软件(最好是同一版本)进行处理。考虑到BERNESE软件需要购买,国内用户较少;GAMIT是开源免费软件,国内用户数量众多,为了便于后续施工和运营期间框架基准的复测维护以及与其他铁路线的衔接,本文建议CP0基线解算统一使用GAMIT软件。
因此,通过上述研究,结合数据处理实践,采用GAMIT 10.40软件进行基线处理。建议采用如下解算方案。
利用IGS提供的事后最终精密星历,并根据轨道参数的先验精度进行适当的约束。
解算模型采用RELAX.松弛解,同时估计卫星轨道和测站坐标。
解算类型选择“1-ITER”,对测站坐标进行一次迭代。
观测量选择LC_HELP类型,即利用LC观测值组合解算模糊度。
截止高度角为15°,采样率为30 s,历元数为2 880。
卫星和接收机的天线相位中心改正采用antmod.dat文件的设定值,天线模型采用ELEV模型。
对流层折射气象参数为:标准大气压101 325 Pa、温度20.0 ℃、相对湿度50.0%,使用的干、湿延迟模型都是Saastamoinen 模型,干、湿延迟投影函数都是NMF 投影函数,采用PWL 分段线性方法估计天顶对流层湿延迟参数并且估计水平梯度,参数估计间隔为4~6 h。
电离层折射影响用LC观测值组合来消除。
利用广播星历中的钟差参数对卫星钟差进行模型改正。
利用伪距观测值计算接收机钟差。
根据高度角对数据定权,Station Error=ELEVATION 10 5。
周跳探测与修复采用AUTCLN自动处理模式。
对测站施加地球固体潮、极潮、海潮和大气负荷潮等各种潮汐改正。
4 框架基准的统一与转换
4.1 框架基准的统一
CP0框架控制网的基准是由卫星星历和基准站坐标共同给出的, 并且要求地面基准站坐标的框架及历元与卫星星历的框架及历元保持一致。因此,为了确定CP0框架控制网在严格基准下的地心坐标,并为了后期施工及运营期间对框架基准进行复测维护以保证其“三网合一”,有必要将CP0框架控制网纳入到ITRF 参考框架中,即在处理时应加上在ITRF 参考框架中已知坐标的IGS参考站数据一起处理,并应统一地面基准站坐标与卫星星历的框架及历元。
ITRF97框架之前IGS使用与ITRF相同的参考框架和参考历元,ITRF97框架后,IGS开始使用自己的ITRF实现,以保持一致性,目前IGS实现的框架与ITRF的差异在1 cm精度范围内[5],IGS与ITRF框架的不一致性影响可忽略不计,可认为是同一参考框架(需要注意的是:快速轨道和钟差产品是直接基于最新ITRF框架的;IGS最终产品与ITRF框架的差别由一周内地心位置的平均值得到的相应参数计算得到,参数可以在IGS网站上查到);由于国际IGS参考站提供的站坐标和速度场总是年代越晚越精确,因此在CP0基线解算时应采用目前发布的最新ITRF参考框架及其参考历元下的IGS参考站坐标,卫星星历采用IGS发布的精密星历,这样不仅实现了地面基准站坐标与卫星星历的框架及历元的统一,而且由于IGS基准站的站坐标精度较高、兼容性较好也确保了GAMIT解算的基线具有较高的精度和可靠性。CP0框架控制网施工建设和运营维护阶段复测时应采用与勘测设计阶段相同的框架基准。
4.2 框架基准的转换
CP0框架控制网的基准通过将选定框架基准下的基准点作为强约束点进行基线网平差来确定。CP0若采用国家A、B级GPS点确定的CGCS2000框架基准,在基线网平差时需将联测的国家A、B级GPS点作为强约束点;CP0若采用IGS参考站确定的ITRF框架基准,在基线网平差时需将联测的IGS基准点作为强约束点;若CP0采用的ITRF框架基准与本次联测的IGS基准点的ITRF框架基准不同,还需将IGS基准点的框架基准转换到CP0采用的ITRF框架基准下,框架基准转换包括参考框架和参考历元的转换,转换采用最新参考框架及其相应参考历元和最新速度场参数反推早期参考框架及其相应参考历元下的已知测站坐标。下面将对ITRF框架基准转换方法进行介绍。
ITRF是一种动态地球参考框架,其定义是通过对框架的定向、原点、尺度和框架时间演变基准的明确定义来实现的。由于不同时期框架之间4个基准分量定义的不同,使得框架之间存在小的系统性差异,这些系统性差异可以用IERS发布的7个转换参数来表示,不同框架之间可以通过坐标系之间的相似变换进行转换,转换公式为[6]
(1)
式中,T1、T2、T3为平移量;R1、R2、R3为旋转量,D为尺度改正因子,此即为ITRFxx框架到ITRFyy框架的7个转换参数。
任一参数P在指定时刻t的值等于基准历元的参数P(t0)加上基准历元t0到转换历元的变化量,即有[5]
(2)
这样利用式(1)和式(2)就可以完成不同参考框架到指定历元t的坐标转换。
在同一框架下不同历元间转换时,如果已知基准点的速度为VITRFxx,则基准点的坐标可按下式计算
(3)
这样即实现了IGS基准点不同框架不同历元间测站坐标的转换。
5 基线网平差方法
基线解算完成且质量检核合格后,首先进行无约束平差,无约束平差满足要求后再进行整体约束平差。无约束平差选择一个精度较高的IGS参考站点作为起算点,平差后输出ITRF参考框架下各点的三维坐标、各基线向量平差值、各基线的坐标分量、改正数及其精度等指标。无约束平差时作为起算点的IGS参考站的框架基准,在CP0框架控制网初次建网时应采用目前发布的最新ITRF参考框架及其参考历元下的测站坐标,后续复测维护时还需将IGS参考点的框架基准转换到初次建网时所在的ITRF框架基准下,作为起算点的IGS参考站应优先选择数据质量较好的测站。根据计算经验,中国境内的IGS站SHAO、BJFS、WUHN、URUM站的数据质量较好一些,LHAS和KUNM站的数据观测质量相对较差。
整体约束平差所采用的约束点应为IGS参考站或国家A、B级GPS点的CGCS2000国家大地坐标系的成果。约束平差时作为起算点的IGS参考站与无约束平差采用相同的框架基准,优先选择数据质量较好的基准站,且联测的其他IGS站点或国家A、B级GPS点的已知坐标成果与无约束平差成果间差值的绝对值应小于0.2 m,且由此计算的基线长度相对误差应小于0.3×D×10-6。平差后输出ITRF参考框架或CGCS2000坐标系下各点的三维坐标、各基线向量平差值、各基线的坐标分量、改正数及其精度等指标。
6 结语
结合在CP0数据处理中的实践经验,对CP0框架控制网数据处理中的基线解算影响因素、框架基准统一与转换、基线解算软件选择、基线解算方案以及基线网平差方法等关键技术进行了研究分析与归纳总结。研究结论如下。
(1)快速精密星历和事后精密星历效果相当,当最终星历的滞后时间无法满足计算要求时,也可采用快速星历代替;广播星历和快速预报星历精度较差,不适合用于CP0框架控制网精密定位;同期或多期基线处理时应尽可能采用同一种类型的星历,最好采用多个机构共同融合计算发布的IGS综合星历。
(2)使用GAMIT软件采用分段线性法进行CP0基线解算时,选择合适的窗口将对基线垂直方向分量解算精度产生较大改善(对东西方向也有一定的提高,对南北方向几乎没有改善),精度可提高2~ 3倍;将天顶对流层湿延迟参数的估计间隔设置为4~6h时基线重复率和网平差精度指标较好,能真实反映出对流层折射影响随时间变化的趋势,从而提高基线解的精度。
(3)使用GAMIT软件进行CP0基线解算时必须严格控制起算点坐标的误差,起算点点位坐标精度最好控制在10 cm之内;当起算点坐标误差达到20 cm时,各基线分量的解算结果的精度在毫米级的量级;当起算点坐标误差达到2 m时,基线解算结果不可靠,不满足高精度解算要求。
(4)CP0框架控制网基线解算时应采用目前发布的最新ITRF参考框架及其参考历元下的IGS参考站坐标,卫星星历采用IGS发布的精密星历,这样不仅实现了地面基准站坐标与卫星星历的框架及历元的统一,而且由于IGS基准站的站坐标精度较高、兼容性较好也确保了GAMIT解算的基线具有较高的精度和可靠性。框架基准转换时采用最新参考框架及其相应参考历元和最新速度场参数反推早期参考框架及其相应参考历元下的已知测站坐标精度损失最少。施工建设和运营维护期间对CP0框架控制网进行复测维护应采用与勘测设计期间相同的基线解算软件(最好是同一版本)进行处理。
[1] 中华人民共和国铁道部.TB 10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[2] 李征航,黄劲松.GPS测量与数据处理[M].2版.武汉:武汉大学出版社,2011.
[3] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M]. 武汉:武汉大学出版社,2009.
[4] 姜卫平,刘经南,叶世榕.GPS形变监测网基线处理中系统误差的分析[J].武汉大学学报:信息科学版,2001,26(3):196-199.
[5] 党亚民,成英燕,薛树强.大地坐标系统及其应用[M].北京:测绘出版社,2010.
[6] 姚宜斌.高精度GPS测量中坐标基准的统一方法研究[J].地矿测绘,2001(2):3-5.
[7] 刘基余,李征航,等.全球定位系统原理及其应用[M].北京:测绘出版社,1993.
[8] 欧吉坤.GPS测量的中性大气折射改正的研究[J].测绘学报,1998,27(1):31-36.
[9] 周东卫.GNSS参考站网络的对流层完备性监测技术研究[J].工程勘察,2012,40(10):65-70.
[10]葛茂荣,刘经南.GPS定位中对流层折射估计研究[J].测绘学报,1996,25(4):255-291.
[11]MIT. Department of Earth, Atmospheric, and Planetary Sciences. GPS Analysis at MIT (Release 10.4), 2010, 10.
[12]GB/T18314—2001.全球定位系统(GPS)测量规范[S].北京:中国标准出版社,2001.
[13]陈光金,付宏平,秦德生.铁路隧道洞内CPⅡ导线测量与复测精度指标合理性探讨[J].铁道标准设计,2014(4):65-68.
[14]余兴胜.构建桥涵勘测技术新体系的研究[J].铁道标准设计,2013(2):73-76.
[15]田林亚, 祖力比亚·阿布都热西提,等.高速铁路测量中高斯平面坐标与斜轴墨卡托平面坐标的转换[J].铁道标准设计,2013(4):13-16.
Research on Data Processing of High-speed Railway CPO Frame Control Network
ZHOU Dong-wei
(China Railway First Surveying and Design Institute Group Ltd., Xi’an 710043, China)
The CP0 frame control network, which acts as the initial datum of plane control surveying for high-speed railway, has to be provided with higher accuracy, reliability and stability. There are many factors affecting the final positioning results of CP0. As failure to properly address these factors may result in large deviation in specified positioning, researches and summarization of data processing mode and method for CP0 are conducted with reference to the real data and practical experiences of related projects, and several principles and methods are proposed to eliminate and reduce systematic errors to baseline resolution, to select reasonable processing scheme and software, and to perform a frame datum uniformity as well as conversion and baseline network adjustment, which, as a result, can solve the problem of frame datum uniformity and improve the reliability and accuracy of the baseline solution.
High-speed railway; Frame control network; Datum uniformity; Resolution scheme; Systematic error
2014-06-09;
2014-06-27
中铁第一勘察设计院集团有限公司科研项目(院科09-05)
周东卫(1981—),男,高级工程师,工学硕士,E-mail:dwzhou810408@126.com。
1004-2954(2015)03-0011-06
U238; U212.24
A
10.13238/j.issn.1004-2954.2015.03.003
