悬吊式机器人消防炮力学建模与稳定性分析*
2015-11-23唐火红骆敏舟冯宝林
周 琼,唐火红,骆敏舟,冯宝林
(1.合肥工业大学,安徽合肥 230009;2.中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州 213164)
0 引言
现有云梯和消防炮等传统地面消防设备难以对高层建筑进行有效的灭火[1]。目前,地面远程气动式灭火炮已成为研究消防设备的热点[2],国内最新的研究成果是航天科工二院高层楼宇灭火系统“导弹灭火[3]”,该远程灭火炮在地面采用车载系统进行发射,因此对其射程和射高要求很大,由于其发射装置均是基于军用武器平台,在民用推广中,存在安全隐患大和运行成本高的问题,且定点灭火准确率不够。
直升机由于具有灵活机动的飞行特性,在高层建筑灭火中发挥着越来越重要的作用,直升机应用于高空消防国际上已有成功的案例[4]。笔者提出将气动灭火炮与消防直升机有效结合的新设想,即在悬吊式高空消防机器人本体上安装气动灭火炮[5],直升机攀升至失火楼层,实施对灭火点的近距离灭火作业,能有效弥补地面车载系统发射灭火弹在射程、安全和成本方面的缺陷。
1 悬吊式消防机器人力学建模
悬吊式机器人的主体为一个由型材搭建的立方形消防舱体,消防炮安装于舱体内部。机器人在直升机悬吊作用下展开灭火工作,消防舱体尾部设有螺旋桨推进系统,可有效平衡消防炮发射的后坐力。根据发射要求,消防炮设有射向可调式安装台。消防炮发射过程中,悬吊式机器人在发射平面内受力简化模型如图1所示。

图1 悬吊式机器人受力分析
图1 中,AC=b,AQ=e,AB =d,A为消防舱体的重心,B为灭火炮管的重心,θ0为发射高低角,φ为悬吊钢索与竖直方向的夹角。Fp为发射后坐力,FN为悬吊钢索的拉力,FT为螺旋桨系统的推进力。
2 消防炮的整体结构设计
图2所示为灭火炮整体结构,其主体由发射炮管、供弹装置、缓冲装置、击发机构、高压气室推进和锁紧机构组成。发射炮管为两端开口的中空圆柱体,内部设有密封环。炮管和滑台之间通过复进弹簧减振。可调式安装座设有旋转台和电动缸结构,其中旋转台由电机驱动,通过蜗轮蜗杆传动,实现炮架在水平面内左右旋转;电动缸调节炮管的俯仰角度,从而实现定点灭火。在灭火弹发射准备阶段,高压气室由气缸推进与炮管底部贴合,同时将弹夹上的灭火弹推进炮管完成上弹任务,锁紧气缸用于限制高压气室在发射过程的轴向移动。击发机构主要组成部分为电磁铁、压缩弹簧和扣件。电磁铁未通电情况下,扣件在压缩弹簧作用下卡住灭火弹头部,待高压气室充气结束达到工作气压时,电磁铁吸合将扣件抽离,灭火弹在全压作用下加速发射。

图2 灭火炮的整体结构模型
3 消防炮外弹道特性分析
3.1 静态发射外弹道运动学方程
不同的气象条件下,灭火弹的射击过程中存在很多影响其弹道轨迹的随机因素。为有效且较为方便地分析,灭火弹出膛以后的飞行阻力简化为自然气象条件下空气阻力和火灾气流造成的阻力两方面来分析。
根据流体力学原理,由火风气流造成的压差[6]为:

自然气象条件下空气阻力fk与炮弹的飞行速度v 成正比[7],即:

由牛顿第二定律得到:

式中:t为以灭火弹离开炮管口为初始点计算的飞行时间,m为灭火弹的质量,b为空气阻力系数,ρ为火场空气密度,ξ为与温度有关的火灾气流阻力系数,S为炮膛截面面积,vg为炮弹出膛初速度,vx为飞行速度水平方向分速度,vy为竖直方向上分速度,vn为计算高度处的火灾气流速度。
3.2 系统扰动对射击初始条件的影响
机器人系统的扰动来自于发射后坐力产生的机器人系统质心的振动,对于射击初始条件具有很大的影响。系统扰动主要表现为系统的扭转、纵摇和横摇运动[8]。设测得的扭转角为 β,纵摇角为 φ,横摇角为θ,系统从不稳定坐标系Rb向稳定坐标系R0转换的方式如图3所示,若单独考虑扭转、纵摇、横摇时的过渡矩阵分别为C1、C2和C3,则总的过渡矩阵为:


图3 坐标系R0与R b之间的变换关系
将发射初速度vg向不稳定坐标系投影,设发射高低角为θ0,射向角为α,则有:
由R0=CRb即可得在系统扰动情况下初速度在固定坐标系内的速度分量为:
将求得的速度分量分别代替外弹道运动学方程中的初速度分量即可修正系统扰动对发射弹道的影响,从而提高发射精度。
4 发射后效期系统稳定性分析
4.1 后效期系统运动微分方程
灭火弹在炮膛内加速阶段,炮管受膛内气体压力作用缓慢后坐,机器人系统在螺旋桨作用下基本处于静平衡状态。灭火弹飞离炮口后,炮膛内气体的急速流出会对炮管产生反冲击力,机器人系统受力分析如图1,发射后坐力由复进簧传至消防舱体,设炮管在发射方向上后坐位移为x1,消防舱体水平位移为x2,则系统运动微分方程为:

式中:c和k分别为复进簧的阻尼和刚度系数,I为机器人系统绕点A的转动惯量,Fqt=SPht,为灭火弹发射瞬间炮管内气体作用于膛底的压力,若忽略此期间膛底压力变化,根据内弹道气动力原理知识[9-10],得:

式中:P0为高压气室初始气压;S和L分别为炮管截面积和长度;V0为气室容积;VL为泄露气体容积;ζ为绝热指数函数,参考火炮发射的气体动力学知识[10],ζ取 1.125。
4.2 运动微分方程的求解与分析
由于发射后效期各扰动参量间相互耦合,上述二阶微分方程组无法求出解析解,笔者采用四阶R-K方法,借用MATLAB中ode45函数调用的算法模块对上述微分方程进行数值仿真分析。由于消防炮的结构参数及发射条件等可以根据具体工作条件改变,在分析时,取消防炮高压气室初始气P0=0.16 MPa,机器人整体系统动力学模型中的相关几何和物理参数如表1所列。
以灭火弹飞出炮口瞬间为初始时刻,当消防炮的发射方向角和高低角分别取0°和30°,以φ=300,x1=0.1m为初始条件,后效期经典时间段内系统动态响应曲线如图4所示。

表1 材料属性参数
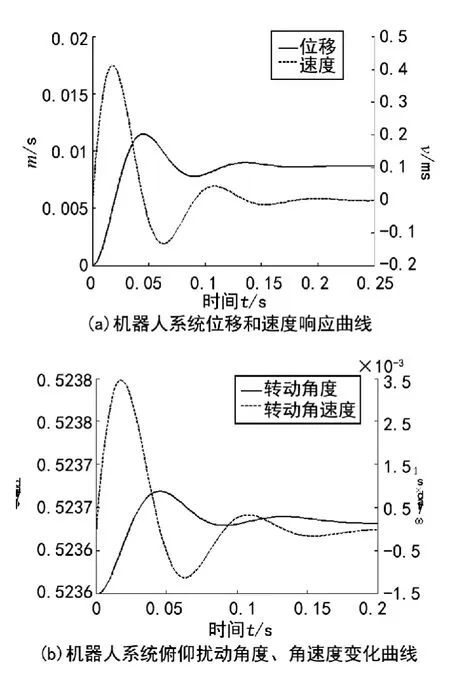
图4 机器人系统动力学响应曲线
分析显示,消防机器人在发射冲击力的作用下有轻微的振动,微分方程求解结果与实际运动规律一致,验证了数学模型的正确性。灭火弹发射后25 ms后机器人系统后坐速度达到最大值,为0.4 m/s,最大后坐位移为11.5 mm。俯仰扰动角度在发射精度要求允许的误差范围内变动。并且,在发射后效期200 ms左右系统整体姿态即可恢复到初始状态。该结果证明了机器人位姿调整系统及消防炮缓冲装置的设计满足系统稳定性要求。
5 结论
本文设计了一种应用于高空消防直升机上的射向可调式气动灭火炮结构,对灭火炮的弹道特性和发射后效期后坐对机器人位姿影响进行了研究,通过运动学分析,得出了外弹道灭火弹在火灾气流影响下的运动学方程。分析了系统初始扰动对射击精度的影响,为发射弹道的实时修正提供了有效的依据。建立了发射炮管与机器人本体之间的运动耦合数学模型,结合计算算例,通过数值仿真,得出后效期机器人系统的动力学响应曲线。该建模和分析方法对安置于悬吊装置上的发射系统动力学分析具有一定的参考价值。
4 结论
针对清洗杯子繁琐费时和市面上现有刷杯器自动化程度不高的现状,研制了一种小型自动刷杯器。其特点是:设计了一种伸缩杆,通过固定杆和运动杆之间的相互运动实现伸缩杆的伸长和缩短,便于水杯的装卸;所设计的清洗系统,其主交流电机和步进电机相互配合,实现了线动成面的运动,便于水杯杯壁和杯底的清洗;所设计的控制系统,单片机实时控制清洗过程中各参数,实现水杯的彻底清洗;所设计的双向螺杆,左旋和右旋螺纹实现了V型块同时相向或背离运动,便于水杯的定位和装夹。
试验结果表明,杯子的清洗程度在90%以上,平均清洗时间为30 s。
[1] 熊星烁,刘洁然.一种保护式便捷洗杯器[P].201020249689.9.2011.
[2] 张长杰,邢艳秋,霍 达,等.小型家用洗杯器的设计与开发[J].森林工程,2012,28(4):45-46.
[3] 毛 溪.洗碗机设计开发和生活方式研究[D].无锡:无锡轻工业大学,1999.
[4] 郭 威,崔 群.基于单片机的步进电机控制系统的设计[J].安徽工程科技学院学报,2006,21(3):59-62.
