新型测斜仪测量误差分析
2015-11-18徐斌,顾伟
徐 斌,顾 伟
(上海海事大学科学研究院,上海 200135)
新型测斜仪测量误差分析
徐 斌,顾 伟*
(上海海事大学科学研究院,上海 200135)
在地下勘测,钻井探矿等领域,需要测斜仪对钻头的姿态进行精确定位与控制,实时监测地底下钻头的姿态变化。新型测斜仪采用环形双分量磁通门传感器和铁芯不固定的方法,具有结构简单,测量参数少,算法简单,正交度补偿算法简单等特点。但是新测斜仪在测量过程中,受到外界的误差干扰和内部传感器的安装设置误差等问题的干扰。本文针对新型测斜仪的传感器模型和电路设计方面,进行了新型测斜仪的测量误差原理分析,应用合理的电路设计减少电气间电磁干扰误差、应用了软件正交校正及物理校正的方法,有效的抑制了测斜仪传感器本身的姿态误差,提高了测斜传感器的测量准确度。
正交补偿;误差分析;磁通门;测斜仪
随着科技的发展,磁测量技术已经在越来越多的工业领域具有着重要的地位。在地下勘测,钻井探矿等领域,需要测斜仪对钻头的姿态进行精确定位与控制,实时监测地底下钻头的姿态变化[1]。测斜仪通常为三分量磁通门传感器与三分量加速度传感器相结合,其测量精度高,范围大,但算法复杂。新型测斜仪采用环形双分量磁通门传感器和铁芯不固定的方法,通过铁芯与磁通门传感器的敏感轴磁通量之间的角度关系,测量被测物体的倾斜角度等姿态变化,省去了重力加速度传感器,具有结构简单,测量参数少,算法简单,正交度补偿算法简单等特点,但其测量范围比较小。
无论是哪一种测斜仪在测量过程中,都会受到外界的误差干扰和内部传感器的安装设置误差等问题的干扰。尤其因为磁通门传感器为矢量测量,其对角度的敏感度巨大,因此些许的传感器安装角度的偏移就会引起测斜仪精确姿态定位的巨大误差。
本文针对新型测斜仪的传感器模型和电路调理方面,进行了新型测斜仪的测量误差原理分析,并对其提出了相应误差校正方法,有效的抑制了测斜仪本身的测量误差,提高了测斜的测量精度。
1 新型测斜仪传感器结构
新型测斜仪采用环形双分量磁通门传感器。磁通门传感器有一个在弱磁场中就能达到饱和磁化的由高磁导率合金制成的磁芯[2],最基本的做法是在两个平行的磁芯上分别绕以初级和次级线圈,两个初级线圈串联起来通以50 Hz~1000 Hz的激励磁场,使磁芯达到饱和状态,次级线圈与差动放大器相连。在外磁场为零时,磁芯中所感应的交流磁通的正半周与负半周完全对称,从而消除变压器效应,次级线圈输出为0。当沿磁芯轴向有直流磁场时,则磁芯将在某一半周先达到饱和,正负半周就不对称,两个次级线圈的输出电压差与磁通量的变化率成正比,测量此电压就可得到地磁场的变化[3]。
现有磁通门传感器有单铁芯式和双铁芯式[4],本文的双分量环形铁芯设计[5]是由双铁芯跑道型磁通门传感器改良而来。其铁芯线圈结构如图1所示。
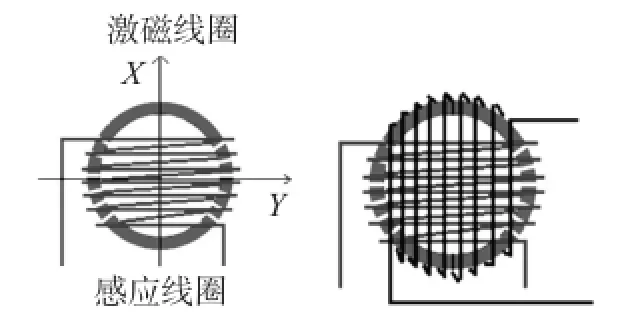
图1 环形磁芯磁通门探头结构及双分量环形磁芯磁通门结构
图中灰色圆形为铁芯,为黄色代表激磁线圈,红色为感应线圈1,蓝色为感应线圈2。感应线圈相互正交放置。因为在同铁芯上同时绕2组感应线圈,但因感应线圈基本垂直,在物理制作中,虽然不能保证严格正交,但其正交度误差一般能控制在1°左右,因此,在感应线圈中的感应电流产生的感应磁场,其磁场的对另一线圈方向上的感应磁场分量将产生小于sin1°的弱耦合磁场。因为sin1°≈0,因此可以忽略感应线圈之间的弱耦合磁场[6]。
针对于现有磁性测斜仪传感器几何中心不重合以及测量算法和误差校正算法复杂的问题,提出采用环型双分量磁通门传感器的新型磁性测斜仪传感器。新型磁性测斜仪传感器由磁通门传感器和小型磁屏蔽桶组成,如图2所示。在磁屏蔽桶的中央固定住环形磁通门传感器,磁通门传感器按水平面放置。
为了能够正确的测量钻头的姿态角变化,在测量磁场的时候,要对周围的环境磁场干扰进行屏蔽,使传感器置于一个相对不变化的磁场中。可在屏蔽装置中设置霍尔姆斯线圈,人为产生磁场或者直接利用过磁化磁屏蔽桶中的剩磁,该剩磁由屏蔽桶材料磁化所引起的磁场,其随着屏蔽桶的方向变化而变化,其大小不变在屏蔽桶中央的磁场方向相对于屏蔽桶是不变的。以该磁场被平行姿态时的传感器所测得的磁场为基准,与倾斜姿态时传感器测得的磁场进行比较计算。
同时对于双分量环形磁通门传感器,其采用环形空心骨架,在骨架中放置半桶硅油,再放入环形铁芯薄皮,使铁芯浮于硅油之上,如图3所示。在传感器发生姿态变化时,即骨架偏离水平面时,铁芯仍然由于硅油液体的流动来始终保持在水平位置。
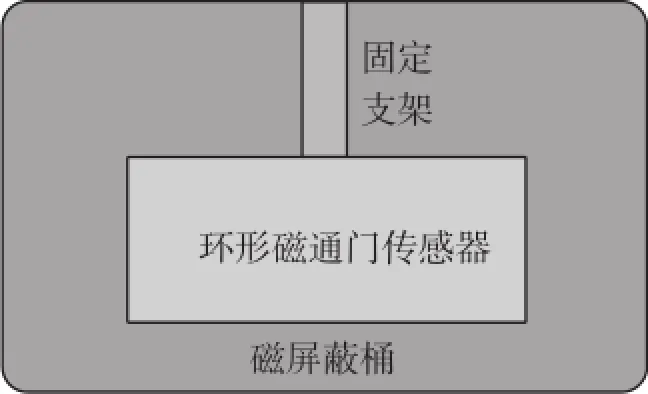
图2 测斜仪传感器结构图
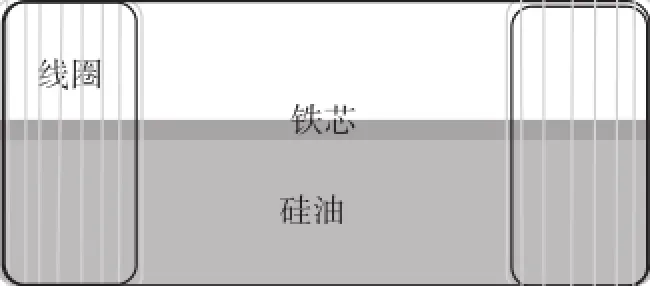
图3 环形磁通门传感器内侧面剖视图
由环形磁通门测量原理可以看出,其测量的磁场为沿磁芯轴向的直流磁场。其两个次级线圈的输出电压差与磁通量的变化率成正比,因此当铁芯与传感器感应线圈轴向不一致时,测量的磁场值的磁场方向为传感器感应线圈轴向的磁场方向。传感器斜置时,铁芯始终保持水平,在铁芯方向存在直流磁场,传感器的磁场测量方向为感应线圈的轴线方向。感应线圈所感应到的线圈轴向的磁通量变化与铁芯中的磁通量变化成角。在外部磁场不变的情况下,传感器中的磁通量总量不变。由平衡姿态测得的磁场和倾斜姿态时测得的磁场可计算得出测斜仪的倾角,并由倾角与双分量磁场数据计算得出物体的各个姿态角。其只需采用了两组双分量磁场数据即4个测量参数,进行计算,并且双分量环形磁通门传感器几何中心同点,测量算法与校正算法得到有效的简化[7]。
2 新型测斜仪电气结构
测斜仪由五部分组成,测斜传感器,磁通门调理电路,数模转换,电源,单片机组成。电路设计为磁通门调理模块,电源模块,数模转换模块,单片机模块。测斜传感器测量得到磁场的磁通门信号,传输给磁通门调理电路。磁通门调理电路对所传输的磁通门信号进行选频放大和积分调理,得到直流电压信号给数模转换电路,单片机读出数模转换得到的数字信号,经过算法计算得到测斜角度,通过以太网传输给上位机显示。电源模块给整个电路系统供电。如图4所示。
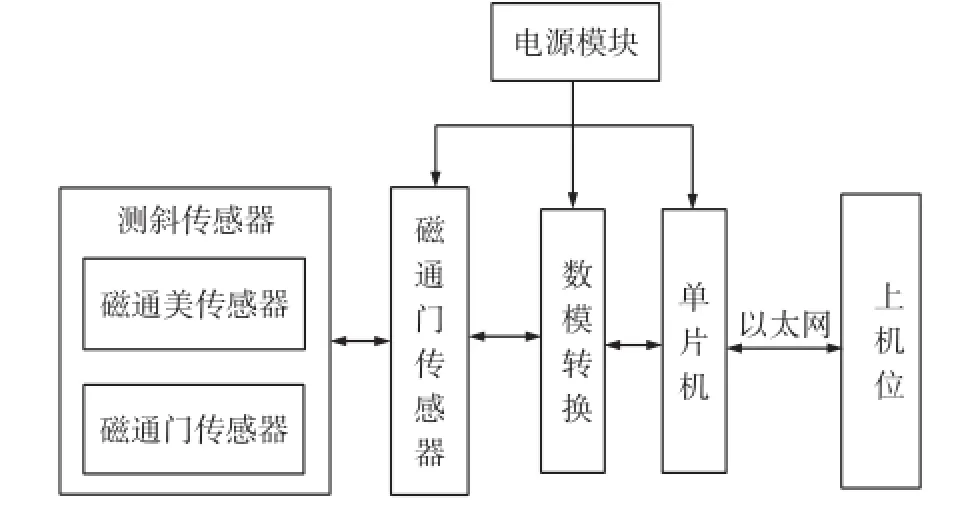
图4 新型测斜仪电气结构
3 新型测斜仪测量误差原因分析
3.1 环形磁通门传感器初始水平放置时不水平
由于新型测斜仪传感器实际测量为倾斜后磁场与水平时磁场的比较,因此传感器在初始位置时应保持水平,即在外层屏蔽桶水平放置时,其中的双分量环形磁通门传感器应保持水平。但是在传感器制作安装的过程中,屏蔽桶内的无磁固定支架安装,及双分量磁通门传感器的固定上,并不能严格保证,双分量磁通门传感器水平放置,即新型测斜仪传感器水平放置时,其中的环形磁通门传感器与水平面具有一个倾斜角,如图5所示。在具有倾斜角没有校正的测斜仪测量过程中,因磁通门传感器内铁芯与感应线圈有以一个固有角度,因此在测量实际姿态变化中,姿态角都将带有这个固定角度误差,形成测量误差[8]。

图5 磁通门传感器不水平放置状态
3.2 双分量环形磁通门传感器间不正交
在双分量环形磁通门传感器的制作过程中,因为双分量分别对应X,Y轴的测量轴,因此在制作传感器时需要使两个感应线圈处于完全正交。然而在实际制作过程中没有办法保证双分量感应线圈相互正交。实际感应线圈安置坐标轴与理想X-Y坐标轴比较,假设X轴重合,Y轴具有一个小角度的偏差。这个偏差会使对应的X轴磁场测量与实际X轴磁场不一致,造成新型测斜仪传感的测量误差,并致使姿态角测量的误差[9-10]。
3.3 新型测斜仪电气误差
因为在电路板设计中时,电路中包含了放大及调理电磁信号的模拟电路模块、运算显示通信的数字电路模块与电源模块,如果电路设计布局不当,容易产生电磁信号干扰,造成测量信号的噪声增大甚至引起信号不稳定。
4 新型测斜仪误差校正算法
4.1 环形磁通门传感器水平修正算法
当磁通门传感器与水平面不平行时,其与水平面成一个小的倾斜角α。当传感器在固定一个点进行测量,旋转一圈得到测量值Xi,Yi,如果不产生倾斜的话,传感器水平,其测得的X分量与Y分量的H应该一致,在坐标图中,应为一个半径为H的圆[11]。实际情况为传感器与水平面具有倾斜角θ,因此其在坐标图中具有一个形变,其按旋转轴位置的总量H1为长轴,垂直于旋转轴位置的总量H2为短轴的椭圆。
在实际测量中,形变的测量值Xi,Yi,其磁场最大值Hmax(Xi,Yi)为其旋转轴位置上的测量得到的磁场,Hmin(Xi,Yi)为垂直于旋转轴位置的磁场。因此可以得到倾斜角α。

实际进行水平修正中,因为旋转轴位置不与X轴位置重合。因此,可以通过Hmax(Xi,Yi)、Hmin(Xi,Yi)和α的关系,求出旋转轴与X轴之间的夹角φ。
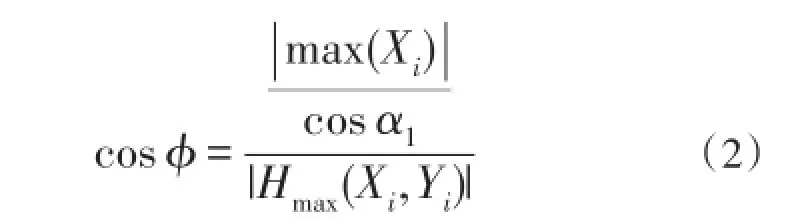
式中,α1为实际坐标中的X轴与水平面X轴的倾斜角。
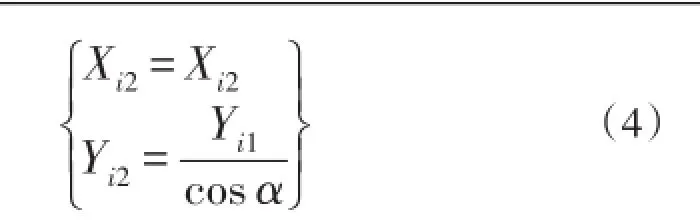
随后把实际传感器的旋转轴旋转至水平面X轴[12],得到Xi1,Yi1其坐标变换为:

因此,修正后得到水平面磁场数值(Xi2,Yi2):
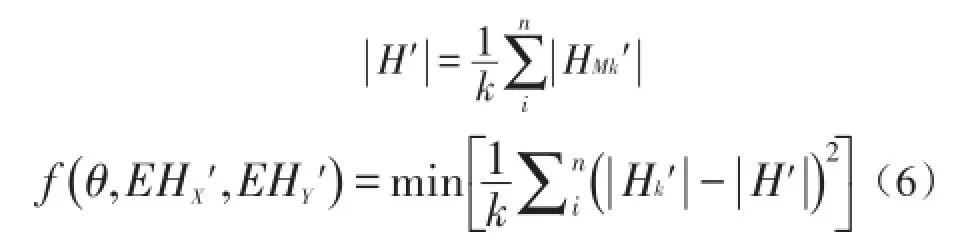
4.2 双分量环形磁通门传感器的正交补偿算法
因为双分量磁通门传感器需要检测X-Y正交坐标系方向的磁场,所以在感应线圈安装设计中,物理上尽量做到正交,然而在实际制作中,在物理上并无法将感应线圈做到完全正交。感应线圈间仍然存在着相互影响的感应磁场,因此在测量软件中需要将这由非完全正交所带来的误差进行修正。
双分量磁通门传感器,设其一轴与理想坐标轴X轴重合。即测量磁场为:
推动依法处理国际经济、政治和社会事务,保障对外开放和和平发展。40年来,我国不断建立健全涉外法律法规体系,运用法治方式维护我国主权、安全、发展利益。改革开放初期,为吸引外资,我国先后制定了中外合资经营企业法、中外合作经营企业法、外资企业法等一系列涉外法律法规。2001年加入世界贸易组织后,为构建符合多边贸易规则的法律体系,大规模开展法律法规清理修订工作。同时,我国积极参与国际规则制定、全球治理体系改革和建设,增强在国际法律事务中的话语权和影响力。通过建立和完善法治,40年来,我国成为世界多极化和经济全球化的重要力量,为推动建设开放型世界经济和构建人类命运共同体作出了重大贡献。

4.3 新型测斜仪电气误差
因为电路设计中电路板既包含电源电路,模拟电路,又包含数字电路,为了减少电路中的电磁干扰电气误差,数字地与模拟地设计要分开,两者的地线不要相混,分别与电源端地线相连,要尽量加大线性电路的接地面积。接地线尽量加粗且构成闭环路。低频电路的地应尽量采用单点并联接地,实际布线有困难时可部分串联后再并联接地。高频电路宜采用多点串联接地,地线应短而粗,高频元件周围尽量用栅格大面积接地。
为了防止电路板中的元器件间的电磁耦合干扰,尽量在关键元件,如ROM、RAM等芯片旁边安装去耦电容。实际上,印制电路板走线、引脚连线和接线等都可能含有较大的电感效应。大的电感可能会在Vcc走线上引起严重的开关噪声尖峰。防止Vcc走线上开关噪声尖峰的唯一方法,是在VCC与电源地之间安放一个0.1 μF的电子去耦电容。
5 误差校正算法试验
本文对新型测斜仪误差算法进行了试验测试,图6为测试流程图、图7为测试用双分量环形磁通门传感器,三轴正交旋转平台及调试电路板的实物图。

图6 测试流程图
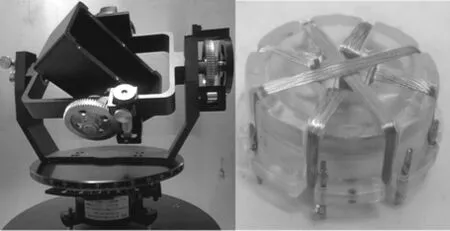
图7 测试用测斜传感器实物图
从图8可以看出,因为传感器安装时不能保持完全水平,其与水平面有一微小角度。因此测量的磁场总量随采样点变化,不为一条水平直线。其单个传感器磁场数据按时间分布是一个幅值不等的正弦波波形。X轴上半周幅值为148 nT,下半周幅值为-156 nT,Y轴上半周幅值为-128 nT,下半周幅值为115 nT。
从图9中可以看出,进过磁场分析运算后,得出一组修正后的磁场数据,其总量基本为一水平直线,即总量一致。其单个传感器磁场数据按时间分布是一个幅值均等的正弦波波形,X轴磁场上下半周磁场幅值皆为153 nT,Y轴磁场上下半周磁场幅值皆为128nT。磁通门传感器与水平面的倾斜角为1.45°。
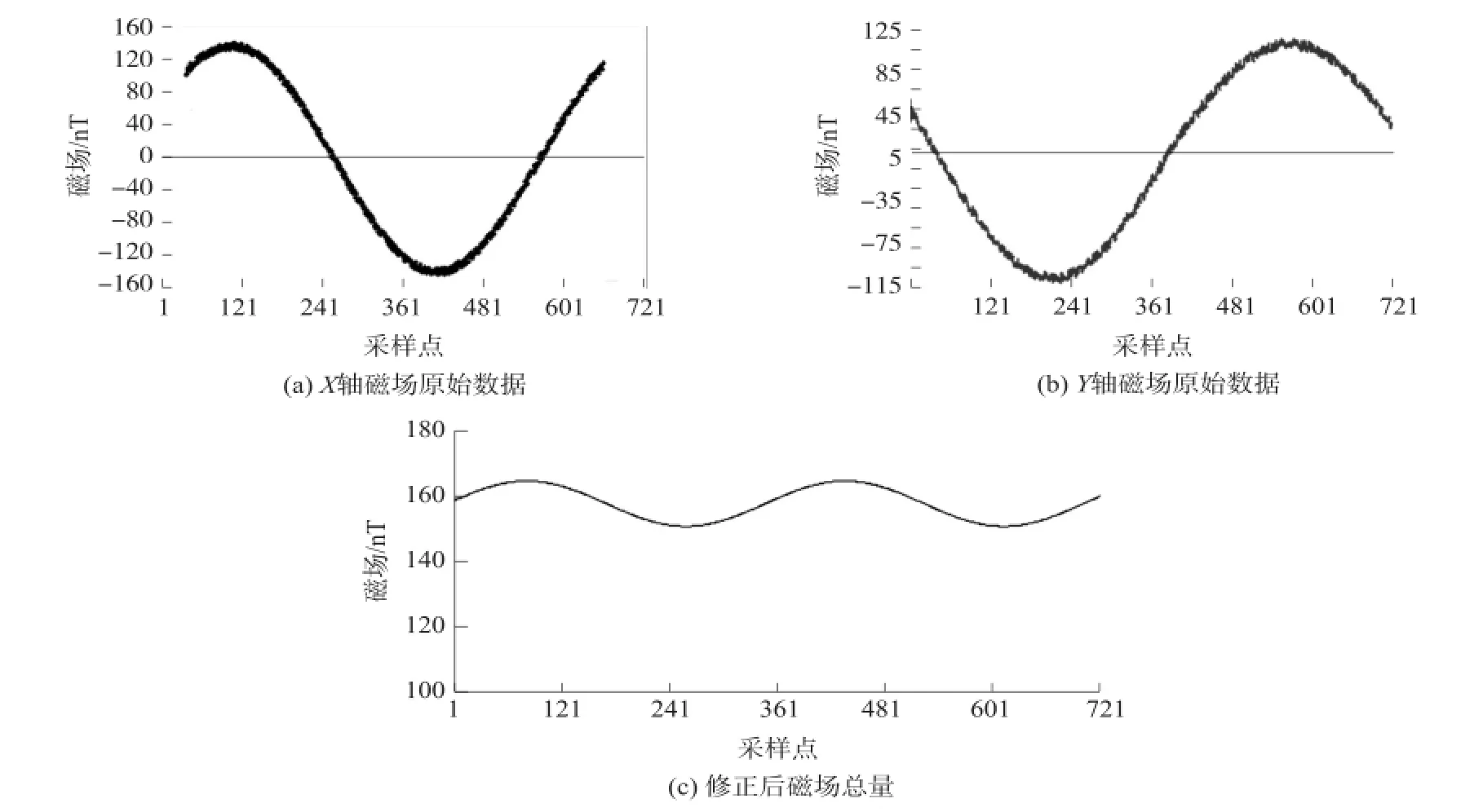
图8 修正前磁场X、Y及总量数据图
由上文的数据可以看出,磁场数据修正前磁场总量不一致,总量数据不为一条水平直线。修正后磁场数据总量基本一致,为一直线。由计算得出,修正后的总量误差相对于修正前的总量误差得到有效减小,误差得到有效抑制,具有实用价值。
6 结论
从上文可以得出,本文针对新型测斜仪进行了原理分析,得出了测斜传感器的测量姿态误差、磁通门传感器的不正交误差及电路设计的误差点,并对这些误差进行了分析。针对电路设计误差,采用更加完善的电路设计方案,减少电路设计中的电磁干扰及数模地之间的干扰。针对磁通门传感器不正交和测斜传感器水平放置时磁通门传感器不水平的问题,建立了数学模型,进行了算法补偿,有效地减少了测量误差。经过试验表明,补偿算法确实有效的减少了测斜仪的测量误差,使测斜仪在实际应用中能更加准确的进行姿态角测量,具有实用价值。
[1] 龙达峰,刘俊,张晓明.陀螺测斜仪小角度井斜角测量的姿态提取方法[J].传感技术学报,2013,26(6):883-886.
[2] 郭爱煌.磁通门技术及其应用[J].传感器技术,2000,19(4):1-4.
[3] RIPKA P.Review of Fluxgate Sensors[J].Sensors and Actuators A:Phys,1992(3):129-141.
[4] 王锋,焦国太,安晓红.三端式磁通门传感器的数学建模及数值分析[J].探测与控制学报,2008,30(5):22-25.
[5] 刘腾飞.环型磁通门传感器的研究与设计[D].武汉:华中科技大学,2010.
[6] 徐斌,顾伟.新型环形同点单铁芯双分量磁通门传感器[J].传感技术学报,2014,27(6):1232-1236.
[7] 徐斌,顾伟.双分量环形磁通门测斜传感器测量原理分析[J].传感技术学报,2014,27(9):1004-1008.
[8] Pavel Ripka,Mattia Butta,et al.Sensitivity and Noise of Wire-Core Transverse Fluxgate[J].IEEE Transactions on Magnet ics, 2010,46(2):654-657.
[9] 张韦,刘诗斌,冯文光,等.基于磁通门的三轴电子罗盘自动误差补偿方法[J].传感技术学报,2012,25(12):1696-1700.
[10]焦秉刚,顾伟,张松勇.三分量磁通门传感器非正交性误差校正[J].现代电子技术,2011,34(13):123-126.
[11]秦勇,赵杰,王晓宇.基于椭圆拟合误差补偿算法的数字磁罗盘[J].吉林大学学报:工学版,2009(2):489-493.
[12]施一民,陈伟,施宝湘.区域性独立坐标系与三维地心坐标系的转换[J].同济大学学报:自然科学版,2009,37(8):1104-1108.
徐 斌(1985-),男,上海海事大学,物流工程学院,在读博士研究生,研究方向为磁场测量,xubin725@sina.com;

顾 伟(1958-),男,上海海事大学,科学研究院,教授,博士生导师,现任上海海事大学科学研究院常务副院长、航运技术与控制工程交通行业重点实验室主任、上海市造船学会理事、中国电工学会船舶电气委员会理事。主要研究方向为港口、船舶自动化与机电一体化技术。主持和参加了上海市、交通部、企事业单位委托科研项目十多项,获中国航海科技三等奖一项、上海市科技进步奖二等奖两项及三等奖两项、安全生产科技成果奖三等奖一项。共申请专利23项,其中发明专利14项,实用新型9项;获得授权专利10项,其中发明专利1项,实用新型9项。在《IEEE transactions on IM》、《机械工程学报》、《电工技术学报》、《仪器仪表学报》、《中国电机工程学报》、《中国造船》等刊物发表论文近三十篇,其中EI、SCI、ISTP检索论文近二十篇,weigu@shmtu.edu.cn。
The Analysis of the Measurement Error for the New Inclinometer
XU Bin,GU Wei*
(Logistics Engineering College,Shanghai Maritime University,Shanghai 200135,China)
In the underground survey,drilling exploration and other fields,the inclinometer is need to pose for bit accurate positioning and control,and for monitoring ground drill attitude change.The new inclinometer by the method of using ring double component fluxgate sensor and the unfixed iron core,has the advantages characteristics of simple structure,less measurement parameters,simple algorithm,simple orthogonal compensation algorithm.But in the process of measurement by the new inclinometer,the measurement is interfered by the outside error interference and internal sensor setup-error etc..According to the model of the inclinometer sensor model and circuit design,the measurement error of principle of a new type of inclinometer is analyzed in this paper.The electromagnetic interference is reduced by application reasonable method of circuit design.The attitude error of measuring inclinometer sensor itself is effectively inhibited by application software orthogonal correction and physical correction.The measurement accuracy of the inclinometer sensor is improved.
orthogonal compensation;error analysis;fluxgate sensor;inclinometer EEACC:7230
TP393
A
1004-1699(2015)07-1035-06
10.3969/j.issn.1004-1699.2015.07.016
2015-01-21 修改日期:2015-03-12
