基于线列阵传感器的射流冲击试验含气率分布研究*
2015-11-18王兴涛JaschaEisembergPrasser
王兴涛,田 芳,Jascha Eisemberg,H.-M.Prasser
(1.国核华清(北京)核电技术研发中心有限公司,北京 102209;2.Swiss Federal Institute of Technology,Institute of Energy Technology,Zurich 8092,Switzerland)
基于线列阵传感器的射流冲击试验含气率分布研究*
王兴涛1*,田 芳1,Jascha Eisemberg2,H.-M.Prasser2
(1.国核华清(北京)核电技术研发中心有限公司,北京 102209;2.Swiss Federal Institute of Technology,Institute of Energy Technology,Zurich 8092,Switzerland)
射流冲击是一种气-液两相流现象,既可作为一种除盐水混合硼酸的有效方法,也可用于研究压水堆(PWR)的承压热冲击(PTS)事故现象。当液体射流撞击水面时,发生气体夹带现象,并产生气泡,气泡夹带对混合过程起到关键的影响作用。研究了不同射流高度和流速下的含气率分布,设计了一种新型三层可移动线列阵传感器(WMS)测量瞬时二维局部空隙率,具有较高的空间分辨率(3 mm)和极高的时间分辨率(2 500 Hz),基于线列阵传感器测量的原始数据,获得了射流冲击中气体夹带的含气率分布,对比分析了不同射流高度和流速下的平均含气率分布。
气-液两相流;射流冲击;气泡夹带;线列阵传感器;含气率
气-液两相流广泛存在于现代工业设备中(如锅炉,蒸汽发生器等)、核反应堆设备中(如气化装置,冷凝器等)、以及化工设备中,研究气相和液相之间的相互作用,对于理解两相流行为和热交换现象非常必要[1]。射流冲击是气-液两相流领域的一种现象[1],如图1所示,当射流撞击到液体表面时,其表面被强迫形成环形半月板形状,半月板下部的不稳定性产生气泡[2]。
射流冲击可应用于许多工业应用中,比如物质混合,湖泊曝气和废水处理等[4-5]。在核电领域,压水堆(PWR)核电站中存在一种承压热冲击(PTS)事故现象,该现象中,冷水注入到填充有部分热水和蒸汽的冷段,冷热水的混合对于限制热反应堆压力容器壁的热负荷非常重要,而射流产生的湍流和气泡夹带影响冷热水的混合过程[6]。另外,射流冲击现象也发生在去离子水和硼酸的混合过程中,若去离子水和硼酸混合不充分,硼酸浓度可能低于临界值,严重时将导致核事故,德国菲利普斯堡的核电站曾发生过类似事故[1],冷却液的射流冲击可作为充分混合硼酸和去离子水的一种有效方法,而且硼酸浓度的测量精确度也非常关键[1]。
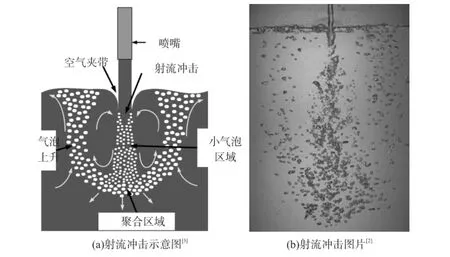
图1 气体夹带现象
在射流冲击中,气泡夹带和含气率分布影响混合过程[5],因此,需要开展不同射流高度和速度下局部含气率分布的实验研究。射流冲击实验研究的测量方法主要包括γ射线和X射线计算机断层扫描、高速摄像、粒子图像测速(PIV)、声学方法和电阻抗成像等[7-10],高速射线断层扫描的缺点是价格昂贵,其他光学方法仅对于低含气率具有较好的可靠性,且一个设备仅能测量一个侧视面,无法获得某个特定点的信息,声学方法只提供没有空间信息的平均数据,电阻成像法成本低,但只提供局部数据,空间分辨率低。
线列阵传感器(WMS)是一种用于快速断层成像的电极网设备,可用于高含气率和恶劣工业设施环境中,成本低,测量稳定。线列阵传感器可获得极高时间分辨率(最高10 kHz)和较高空间分辨率(1.5 mm~3.0 mm)的信息[5,7,11]。Johnson首次使用线列阵传感器测量原油中水的体积含率[12]。德国Reinecke等人将线列阵传感器用于层析成像[13],该迭代图像重建算法需要大量的计算,非常耗时。H.-M.Prasser等人和TeletronicRossendorf公司研发了新型线列阵传感器系统[11],已成功应用于气-液两相流测量,实现了快速断层成像与图像显示[9-10,14]。
1 射流冲击台架设计
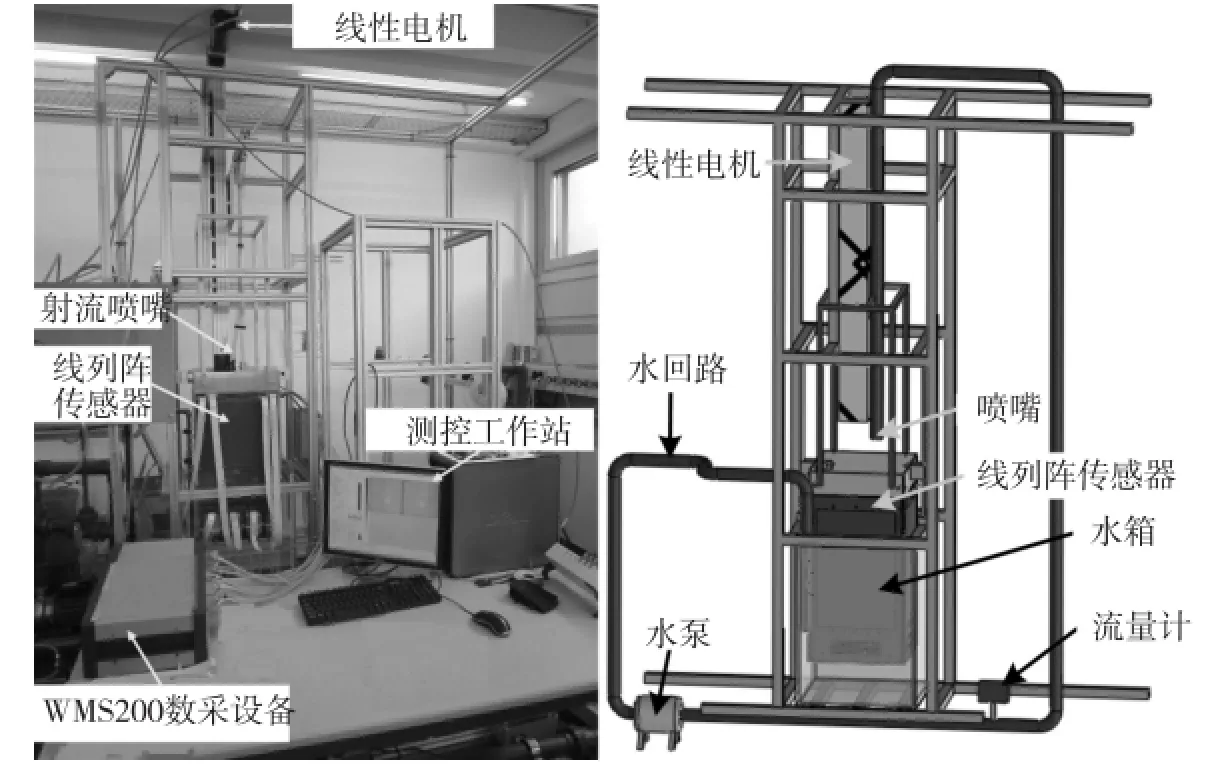
图2 射流冲击台架
1.1 系统概述
图2为射流冲击台架的构成,主要组成部分如下:
①基于PC机的测控工作站:包括一个线列阵传感器位置与运动控制模块,实现传感器的指定位置控制和上下运动控制;一个数据测控模块,实现和数采设备之间的参数控制与数据采集。
②WMS200数据采集设备:该设备和线列阵传感器连接,为传感器提供驱动电压,并采集传感器的测量数据,由测控工作站进行参数设置,并将采集的数据传输给测控工作站。
③三层可移动式线列阵传感器:该传感器由三层相互垂直的钢丝电极构成,若钢丝电极交叉点处介质电导率不同,则测量电流值不同,实现测量截面局部瞬时空隙率的测量。
④线性电机:该电机与可移动式线列阵传感器连接,用于将传感器定位在指定位置处,或者用于传感器在垂直方向的上下运动,可通过测控工作站进行控制。
⑤水回路:主要包括水泵、水箱、流量计、以及喷嘴,水泵将水箱中的水引导至水箱上方,然后通过喷嘴重新注入水箱中,实现射流冲击现象。
在射流冲击系统中,水从水箱中流出,再从喷嘴注入水箱,形成闭环循环流动。射流出口是一段长度为350 mm的管道,末端为圆柱形喷嘴,该射流管道通过软管和其他管道连接,可以降低或提升射流管道,实现射流高度的调整。
1.2 线列阵传感器测量原理
如图3所示为简化的线列阵传感器,由两层相互垂直的钢丝电极构成,每层电极由4根相互平行的钢丝构成,其中一层为发射极,另外一层为接收极,两层电极不接触,交叉点为测量点,形成了4×4的测量矩阵。电压驱动发射极,接收极接收电流,通过电流值的放大、采样保持、以及转换,最终通过总线传输数据给计算机[5,11,15]。

图3 线列阵传感器简化图
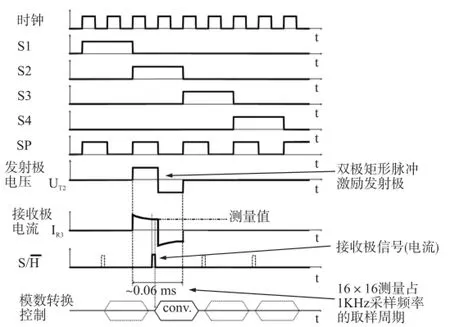
图4 信号控制与采集时序图
图4为线列阵传感器的信号控制与采集时序图,通过控制SP开关(图3),可产生一个驱动发射极的矩形脉冲信号,发射极的每一根钢丝电极由S1~S4开关的通断实现按时序顺序使能,其中一个开关使能,其它开关断开,使能的发射极钢丝和每根接收极钢丝之间将产生电流信号,在一个发射极测量周期内(如图4中发射电极2的驱动电压UT2),通过触发控制信号S/H,每根接收极钢丝分别测量电流值(如图4中接收电极3的测量电流IR3),该电流值通过后续处理后通过数据总线由计算机进行数据采集。当最后一根发射极使能,接收极完成电流采样,则获得一个二维数据矩阵。
2 三层线列阵传感器设计
如图5所示,射流冲击台架使用三层线列阵传感器,由三层相互垂直的钢丝电极构成,中间一层为发射极,上下两层为接收极,当中间层发射极使能时,上层和下层接收极可测量电流值,该三层线列阵传感器具有两个测量平面。

图5 三层线列阵传感器设计图
细长钢丝电极像天线一样,容易受外界信号的干扰,而且相邻钢丝之间也会相互干扰,因此,两侧边缘的钢丝仅受一根相邻钢丝干扰。如图6所示,为了保证测量信号的同一性,减小边界效应,每层测量平面由68根钢丝电极组成,但仅有64根钢丝电极连接WMS200数采设备,用于测量数据,两侧各有2根辅助钢丝仅固定在框架上,接地但不连接数采设备,以保证每根钢丝电极具有相同的测量环境,因此,该传感器在每个测量平面可获得64×64=4 096个交叉测量点。每层测量平面中钢丝电极之间的间距为3 mm,测量平面之间的轴向间距为3 mm,即发射极平面和接收极平面之间的间距为3 mm,因此,测量区域为(64×3)×(64×3)=192 mm×192 mm,钢丝电极的材料为FeCr18Ni10Mo3,直径为0.2 mm,传感器安装框架的尺寸为400 mm×400 mm。
如图7所示,传感器框架由四块金属板构成,每块金属板上面安装固定了一个PCB板,金属板和线性电机连接固定,起到支撑作用,PCB板和钢丝电极之间由68个螺栓螺母进行机械固定,由64个焊盘进行电气连接,将钢丝电极测量信号传输给数采设备,金属板和钢丝电极隔离不连接。

图6 线列阵传感器尺寸
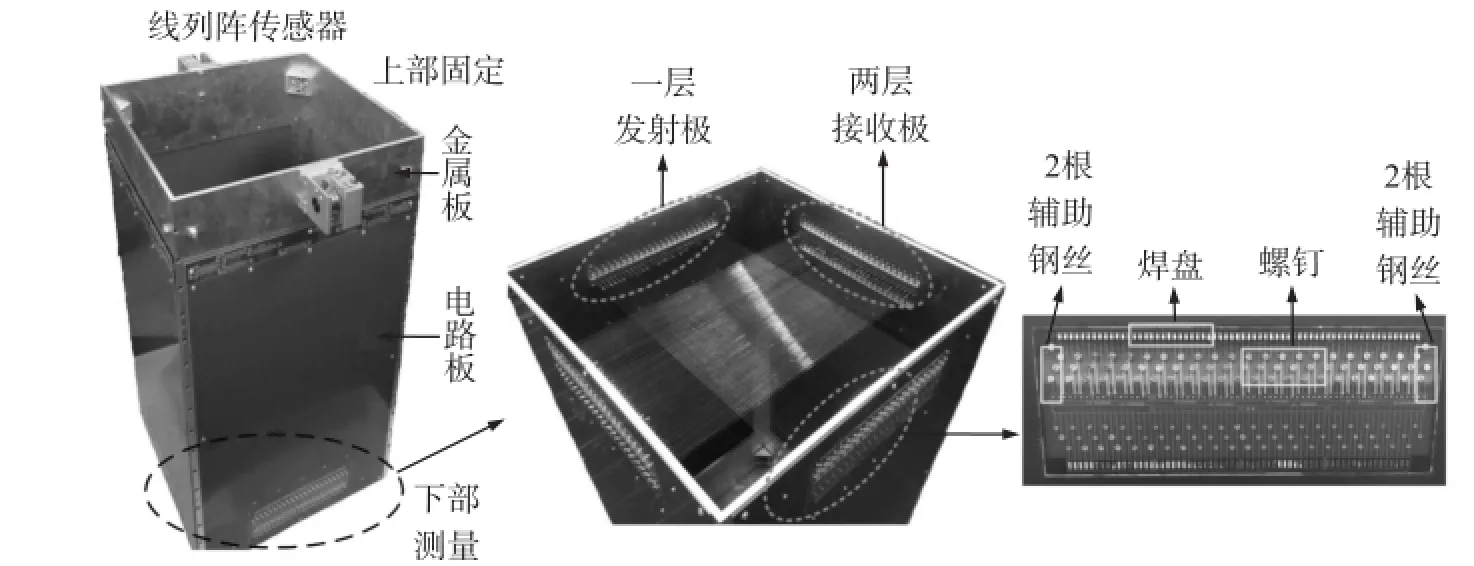
图7 三层线列阵传感器机构
3 试验和数据分析方法
3.1 试验说明
试验过程中的射流冲击和气泡夹带如图8所示,当射流水柱撞击水面时,水下夹带产生一簇气泡群。
为了计算分析气泡夹带含气率的三维分布,试验采用动态数据采集方式,传感器由线性电机驱动在水箱内垂直上下往返运动,即上行运动和下行运动,一次上行/下行运动对应一次完整的测量周期。本文完成了3组不同参数的对比试验,每组试验中传感器连续完成2 000次垂直运动,包括1 000次下行运动和1 000次上行运动,每次运动可采集并保存一组传感器数据,因此,每组试验可获得2 000次数据。试验中可调整两个参数,即“射流高度”和“流速”,如图8所示,“射流高度”指从喷嘴出口到水面的垂直距离,“流速”指水回路系统中水的体积流量。如表1所示,进行了3组不同参数的对比试验,采样频率为2 500 Hz,一次垂直运动的测量周期为1 s,传感器上下运动的速度为0.5 m/s。
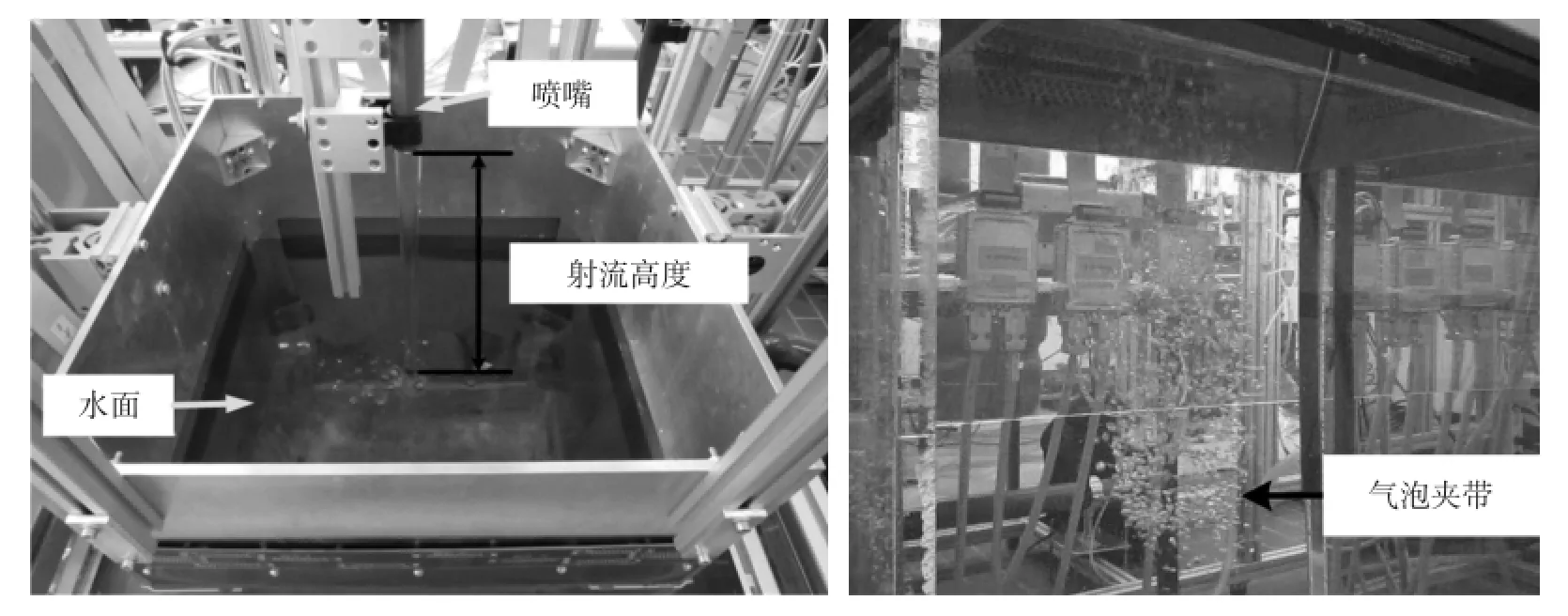
图8 射流冲击气泡夹带试验

表1 三组对比试验参数
3.2 平均含气率分布算法
根据试验参数配置,每一根发射极钢丝i(1~64)和接收极钢丝 j(1~64)所构成的交叉点为一个测量点,因此,每次采集将得到一个64×64的二维测量值矩阵,线列阵测量系统每秒采集2 500次数据,则每帧数据k(1~2 500)为一个二维测量值矩阵。传感器一次垂直运动周期(1 s)内采集2 500帧二维数据矩阵,得到一组[i,j,k]=[64×64×2 500]的三维测量值矩阵,每帧的每个交叉点测量值表示为 μi,j,k,则该测量值可转换为局部瞬时含气率εi,j,k,

式中:i,j为传感器横截面内交叉点的索引,取值范围1~64;k为测量帧的索引,取值范围1~2 500;μi,j,liquid和 μi,j,gas分别表示交叉点i,j在纯液相和纯气相内的校准测量值。通常情况下,空气为一种绝缘体,气相的校准测量值近似为0,即 μi,j,gas=0。交叉点处液相校准测量值通过传感器在纯水中测量得到,则,εi,j,k可简化为:


4 试验结果
根据3.2节含气率计算方法,求解试验1组平均含气率分布,图9(a)和图9(b)分别为上行和下行运动1 000次测量平均空隙率分布的第1 500帧计算结果。通过上行和下行运动在同一个位置处的结果对比可知:由于线列阵传感器是一种侵入式测量方式,当传感器在水中上下运动时会影响流型、夹带气泡的运动与分布,导致两个运动方向测量结果的差异。

图9 试验1组第1500帧平均含气率结果
试验2组在下行运动不同位置处的平均空隙率分布如图10所示,图10(a)第1帧为水面附近的平均空隙率分布,从图中可清晰地看到水面下方夹带产生了一个高含气率的环形分布,表明了射流水柱冲击水面所产生的空气夹带现象,如图10(b)所示,在水面下方较低位置处的第500帧仍可测量得到该环形分布。如图10(a)~10(f)所示,在传感器下行过程中,首先射流水柱撞击水面,然后水柱周围的空气从水和空气之间的边界层被夹带进入,这是由于湍流产生的射流表面干扰和接收液体表面之间的相互作用所造成的,夹带的环形空气又被射流水柱推入水下深处,最后环形空气在下降运动中分解成单独的气泡,在运动过程中,一些气泡可能会聚集成为一个更高含气率的大气泡,如图10(d)的中心处所示,仅有一小部分的气泡能够抵达底部,如图10(e)所示。

图10 试验2组下行运动平均空隙率分布
将水下气泡群沿垂直方向(运动方向)剖面,可得到平均含气率的垂直分布,如图11所示,当水从喷嘴射流撞击水面时,发生气泡夹带现象,水面之下产生柱状水涡,顶部射流的周围存在更多的气泡,一些夹带的气泡进一步被推入水下,从水涡侧面脱离,然后返回水面,仅有少数气泡在射流中心。对比试验2组和试验3组,相同流速时,若增加射流高度,则减小空气夹带深度,增加气泡群密度。对比试验2组和试验1组,相同射流高度时,若增加流速,则增加空气夹带深度,空气夹带产生的气泡群更加均匀。
此外,图11中水面附近存在两个较高含气率的矩形条,表明了射流冲击的空气夹带现象。如图10 (a)所描述,该现象在水平横截面平均含气率分布中也可观察到,如图12所示,三组试验中水面正下方的第一帧图像存在一个较高含气率的环形区域,中间区域含气率较低,表明了射流水柱在环形区域中心处冲击水面,在水柱周围产生空气夹带。
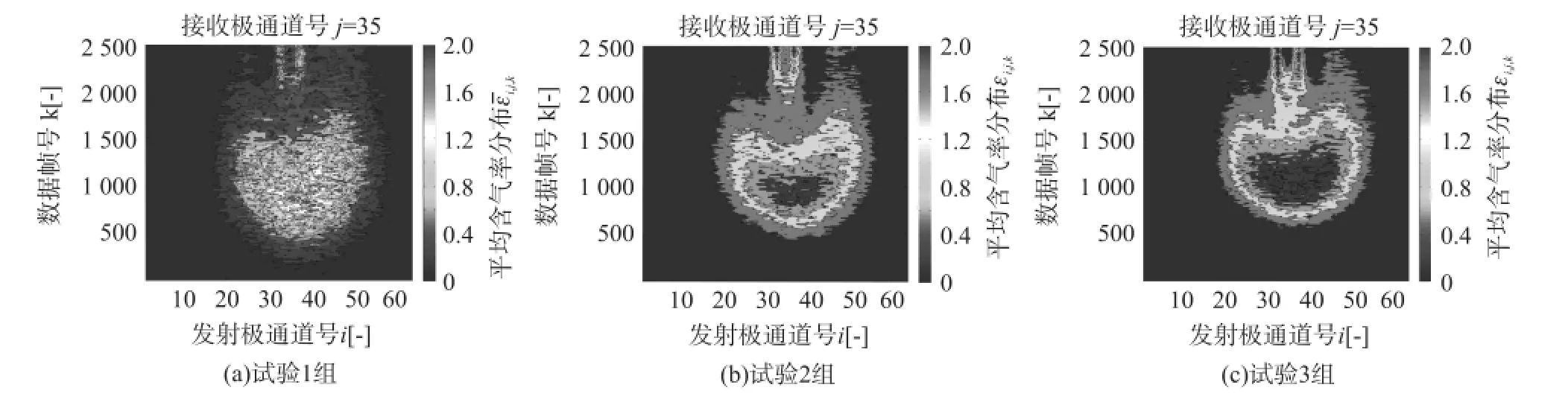
图11 试验1组~3组下行运动平均空隙率的垂直横截面分布(j=35)

图12 试验1组~3组下行运动第一帧试验结果
5 总结
本文设计了一种可移动式三层线列阵传感器,用于测量射流冲击空气夹带的局部瞬时空隙率,该传感器具有较高的空间分辨率和极高的时间分辨率,设计了相关的数据处理算法,根据原始测量数据求解了平均含气率分布。分析讨论了平均含气率的水平截面分布和垂直截面分布情况,依据试验结果分析说明了射流冲击的空气夹带现象。
试验结果会受到不同种类误差的影响,比如金属框架引起信号噪声,导致测量信号误差,算法中的一些假设导致虚假含气率的产生等等。然而,在可移动式三层传感器设计方面,本文提供了有价值的经验,对于射流冲击空气夹带现象的气泡形成与分布,给出了试验性分析与验证。
[1] Daniel Wilhelm.Measurement of the Bubble Distribution Caused by a Plunging Liquid Jet[D].Zürich:ETH,2010.
[2] Jose M Lopez Mendoza.Falling Film and Gas Entrainment in Vertical Downward Two-Phase Flow[D].Oklahoma:The University of Tulsa,2011.
[3] Van de Donk J.Water Aeration with Plunging Jets[D].The Netherlands:Delft University of Technology,1981.
[4] H.-M.Prasser,Scholz D,Zippe C.Bubble Size Measurement Using Wire-Mesh Sensors[J].Flow Measurement and Instrumentation,2001(12):299-312.
[5] Jascha Eisenberg.Automation,Stabilization and Synchronization of a Movable Wire Mesh Sensor[D].Zürich:ETH,2011.
[6] Marco Jose da Silva,Tobias Sühnel,Eckhard Schleicher,et al. Planar Array Sensor for High-Speed Component Distribution Imaging in Fluid Flow Applications[J].Sensors,2007(7):2430-2445.
[7] 孙亚杰,高艺,薛瑶环,等.相控阵超声监测成像与直方图匹配图像增强实验研究[J].传感技术学报,2015,28(1):86-92.
[8] Reungoat D,Riviere N,Faure J P.3C PIV and PLIF Measurement in Turbulent Mixing-Roundjet Impingement[J].Journal of Visualization,2007(10):99-110.
[9] Bonetto F,Lahey Jr R T.An Experimental Study on Air Carry-Under Due to a Plunging Liquid Jet[J].International Journal of Multiphase Flow,1993(19):281-294.
[10]张慧,何常德,苗静,等.一种基于MATLAB的CMUT阵列设计与成像仿真方法[J].传感技术学报,2014,27(4):490-494.
[11]H.-M.Prasser,Böttger A,Zschau J.A New Electrode-Mesh Tomograph for Gas-Liquid Flows[J].Flow Measurement and Instrumentation,1998(9):111-119.
[12]Johnson I D.Method and Apparatus for Measuring Water in Crude Oil[P].United States Patent,4644263.1987-02-17.
[13]Reinecke N,Boddem M,Petritsch G,et al.Tomographisches Messender Relativen Phasenanteile in Zweiphasigen StromungenfluiderPhasen[J].ChemieIngenieurTechnik,1996,68(11):1404-1412.
[14]孙青,王化祥.一种新型网丝传感器优化设计[J].传感技术学报,2010,23(4):465-470.
[15]Ito D,H.-M.Prasser,Kikura H,et al.Uncertainty and Intrusiveness of Three-Layer Wire-Mesh Sensor[J].Flow Measurement and Instrumentation,2011(22):249-256.

王兴涛(1985-),男,国核华清(北京)核电技术研发中心有限公司,博士,工程师,主要研究方向为非能动先进压水堆核电站热工水力试验测控技术、线列阵传感器两相流测量技术、机器人技术等,wangxingtao@snptc.com.cn;

田 芳(1972-),女,国核华清(北京)核电技术研发中心有限公司,硕士,教授级高级工程师,主要研究方向为非能动先进压水堆核电站热工水力试验仪控电气技术,tianfang@snptc.com.cn。
Study on Void Fraction Distribution of Plunging Jet Experiment with Wire Mesh Sensor*
WANG Xingtao1*,TIAN Fang1,Jascha Eisemberg2,H.-M.Prasser2
(1.State Nuclear Power Technology Research and Development Centre,Beijng 102209,China;2.Swiss Federal Institute of Technology,Institute of Energy Technology,Zurich 8092,Switzerland)
The plunging jet is a phenomenon of two phase gas-liquid flow,which could be an effective method to sufficiently mix boric acid with de-ionized water,and is suitable for studying the Pressurized Thermal Shock(PTS)accident scenario of Pressurized Water Reactors(PWR).The air is entrained when the liquid jet hits the water surface,which generates bubbles during the air entrainment.This bubble entrainment has a crucial influence on the mixing process.The distribution of void fraction was studied in dependence of the jet length and flow rate.A movable threelayer Wire Mesh Sensor(WMS)is designed to measure sequences of instantaneous two-dimensional gas fractions with a high-resolution in space and time,which,from the data,derives the void fraction distributions.Comparisons of average void fraction are carried out with different jet lengths and flow rates.
gas-liquid flow;plunging jet;bubble entrainment;wire mesh sensor;void fraction EEACC:7210;7230
TP212
A
1004-1699(2015)07-1008-08
10.3969/j.issn.1004-1699.2015.07.012
项目来源:国家核电技术公司员工自主创新项目(SNP-KJ-CX-2015-16)
2015-04-12 修改日期:2015-06-29
