多时滞离散切换系统的动态输出反馈H∞控制
2015-11-04王强聂宏
王强,聂宏
1.辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001
2.辽宁石油化工大学理学院,辽宁抚顺113001
多时滞离散切换系统的动态输出反馈H∞控制
王强1,聂宏2
1.辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001
2.辽宁石油化工大学理学院,辽宁抚顺113001
借助多Lyapunov函数方法,研究一类具有多时滞的离散切换系统的鲁棒H∞控制问题。假设切换系统的每个子系统都不能实现鲁棒H∞控制,基于切换动态输出反馈控制策略,给出了系统存在鲁棒H∞干扰抑制水平γ可切换镇定的充分条件,并表示成与时滞相关的线性矩阵不等式(LMI)形式,还分别给出了切换律和动态输出反馈控制器的设计方案。最后用仿真例子说明了结论的有效性。
离散切换系统;动态输出反馈;多时滞;多Lyapunov函数;鲁棒H∞控制
1 引言
切换系统作为一类特殊的混杂系统,一般由一组子系统和描述它们之间联系的切换策略而组成。它广泛存在于实际工程系统中,如化工系统、通信系统、交通系统、电力系统、航空系统等。近年来已经引起众多学者的广泛关注。尤其是切换系统的稳定性方面取得了大量的研究成果[1-5]。文献[6]综述了线性切换系统的研究进展。文献[7]考虑了一类具有非线性扰动的离散切换系统基于观测器的指数镇定问题,给出了系统基于观测器指数镇定的充分条件。文献[8]研究了一类具有饱和的不确定离散切换系统基于平均驻留时间的静态输出反馈控制问题,设计出了使得闭环系统稳定的静态输出反馈控制器。借助平均驻留时间方法和多Lyapunov函数方法,文献[9]针对一类连续时间不确定线性切换系统,给出了系统在基于切换时间切换律下渐近稳定的充分条件,并获得了相应的H∞动态输出反馈控制器的设计步骤。文献[10]借助单Lyapunov函数方法研究了一类不确定非线性切换系统的动态输出反馈H∞控制问题,构造出了相应的Lyapunov函数和切换律。文献[10]借助单Lyapunov函数方法研究了一类不确定非线性切换系统的动态输出反馈H∞控制问题,构造出了相应的Lyapunov函数和切换律。
目前国内外有关时滞切换系统鲁棒控制的研究主要针对单时滞切换系统[11-14],涉及多时滞问题的研究还不多[15-16]。由于状态变量所得到的关于系统动静态的信息比输出反馈变量提供的信息更丰富、更全面,因此在现代控制理论中多采用状态反馈。文献[11]使用多Lyapunov函数方法,研究了一类具有单时滞的离散切换系统基于状态反馈的鲁棒H∞控制器设计问题。使用公共Lyapunov函数方法,文献[15]给出了任意切换下一类不确定离散多时滞系统基于状态反馈鲁棒稳定的充分条件,并设计了系统的状态反馈控制器。但是由于切换系统的复杂程度高,切换系统状态作为系统内部变量组,量测手段在经济性和适用性上的限制,状态反馈很难实现。状态反馈在性能上的不可替代性和在物理上的不能实现性,形成了一个尖锐的矛盾。解决这个矛盾通常需要采用动态输出反馈方案,也就是在反馈系统中单独或同时引入串联补偿器和并联补偿器,从而使输出反馈达到状态反馈功能。因此,文献[16]通过构造状态观测器利用估计状态替代实际状态,针对一类具有多重状态时滞和凸多面体不确定性的离散切换系统,给出了系统在任意切换信号下基于观测器的动态输出反馈鲁棒镇定的充分条件。
本文在文[11]、[15]的基础上,利用多Lyapunov函数方法,研究一类具有多时滞的离散切换系统在动态输出反馈下的鲁棒H∞控制器设计问题,以线性矩阵不等式形式给出了闭环系统H∞意义下渐近稳定的充分条件,同时还分别给出了基于切换时间的切换律和鲁棒H∞控制器的设计方案。与文献[11]相比,本文使用的Lyapunov函数具有较小的保守性。
2 系统描述
考虑如下多时滞线性离散切换系统:
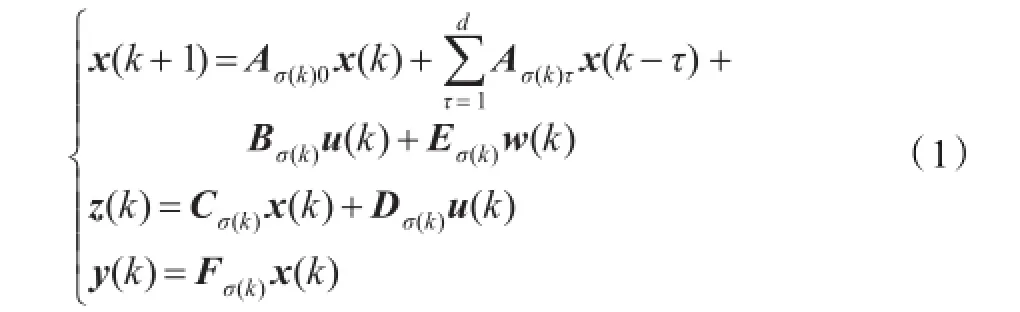
式中,x(k)∈Rn表示系统的状态向量,z(k)∈Rq表示被控输出,y(k)∈Rl表示测量输出,u(k)∈Rm表示输入向量,w(k)∈Rp表示外部干扰且w(k)∈l2[0,∞],τ=1,2,…,d表示滞后时间,σ(k)表示切换信号且,当切换信号σ(k)=i时表示第i个子系统被激活,相应的子系统矩阵为:

在系统(1)中每个子系统都不能实现鲁棒H∞控制的假设条件下,研究系统(1)的鲁棒H∞控制问题。考虑采用如下形式的动态输出反馈控制器:


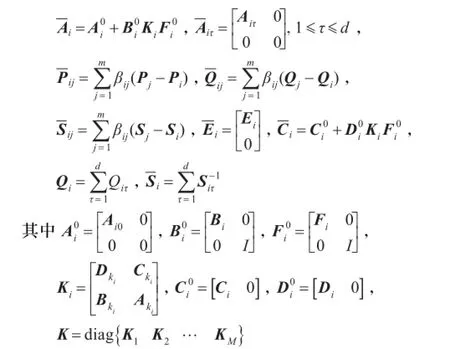
其中
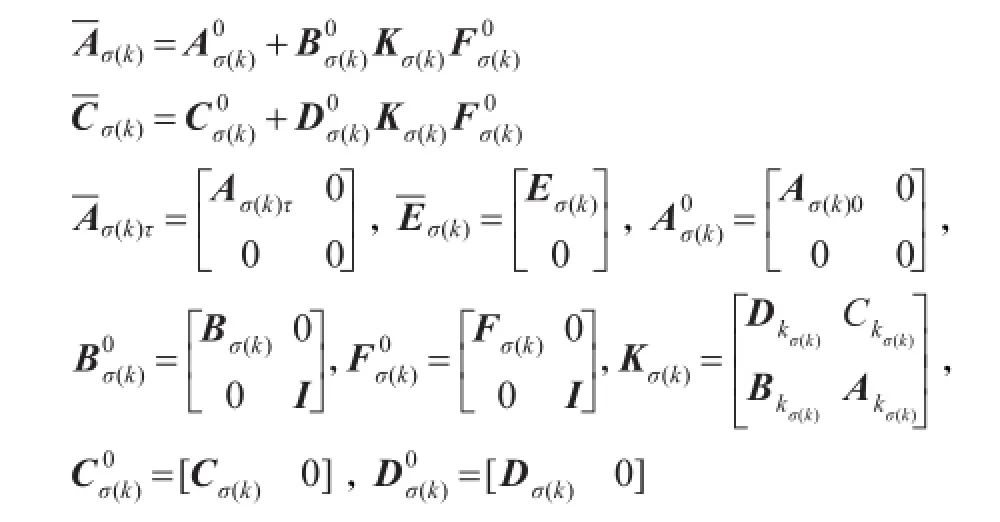
从而本文的目标为:设计切换规则σ(k)和控制器(2)的参数矩阵Aki,Bki,Cki和)使得系统(3)是具有H∞扰动抑制水平γ可切换稳定的。
不同用户登录后都可以对文件中的图片进行火点的检测,点击图片按钮弹出对话框选择要检测的图片,界面中会标记显示出图片中出现的火点情况,并且显示出该图片的处理后的二值化图像。图片界面检测如图4所示。
3 主要结果
引理1[17](Schur补引理)对于定义在Rm上的矩阵Q(x)=QT(x),R(x)=RT(x)以及S(x),线性矩阵不等式(LMI)
等价于

或

利用多Lyapunov函数方法和线性矩阵不等式方法可推导出如下定理:
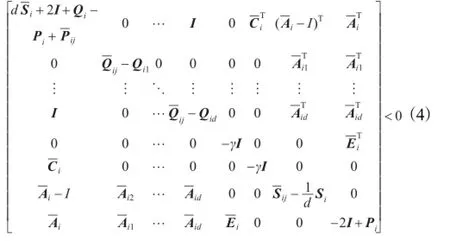
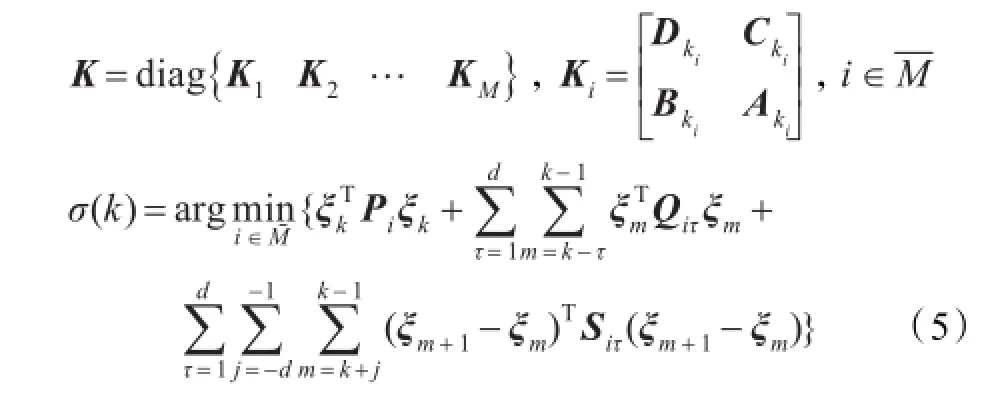
则多时滞离散切换系统(1)是具有鲁棒H∞干扰抑制水平γ动态输出反馈可切换镇定的,并设计动态输出反馈子控制器增益矩阵和切换律为:
证明选取Lyapunov函数为:
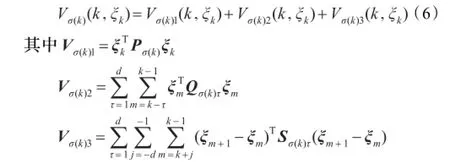
因为Pσ(k)为正定对称阵,Qσ(k)τ、Sσ(k)τ为正定对称阵,所以Vσ(k)(k,ξk)正定。


由不等式-2αTβ≤αTSα+βTS-1β,可得:可知,
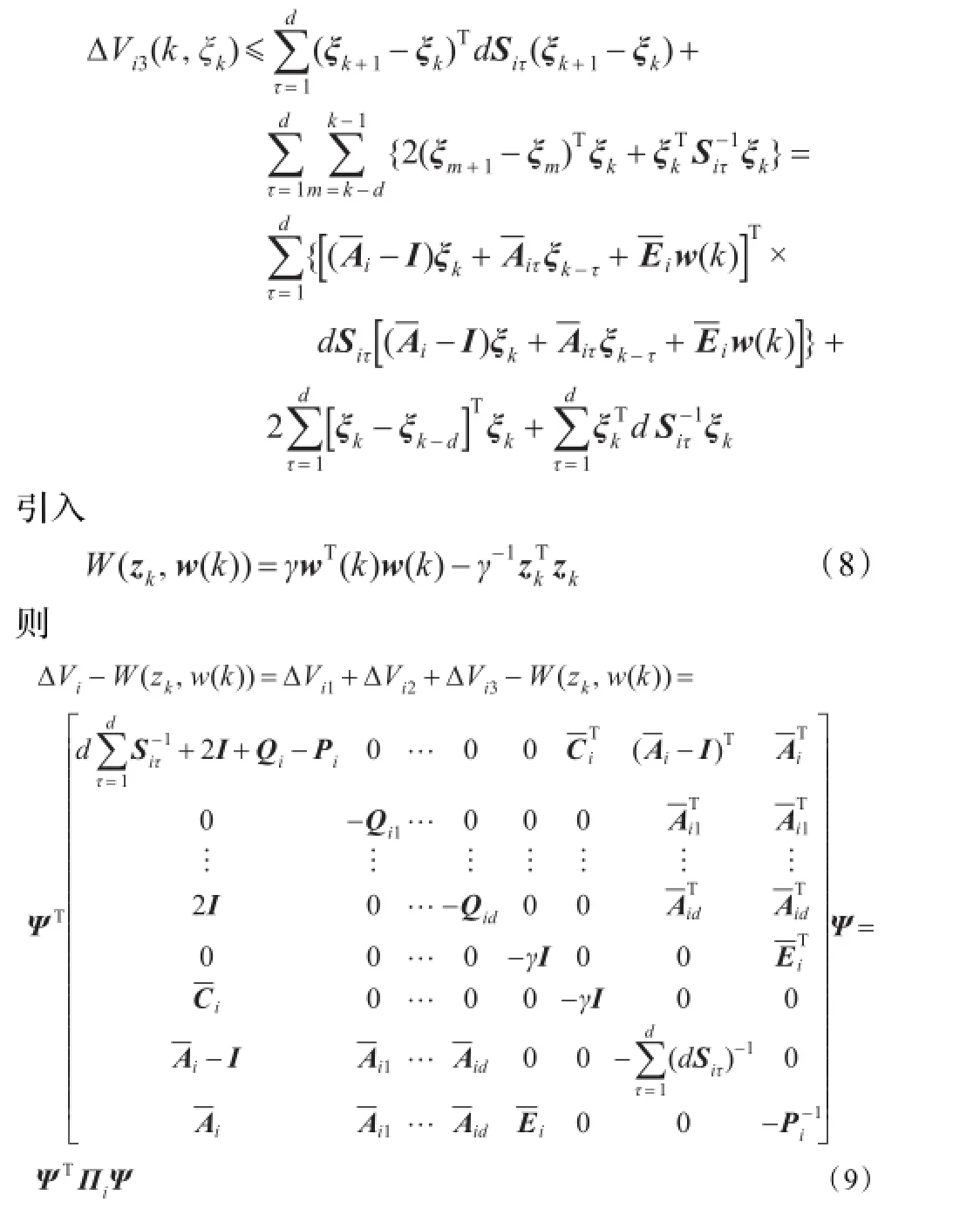
利用矩阵的Schur补性质,由式(4)和不等式

由切换律(7)和(10)可得,
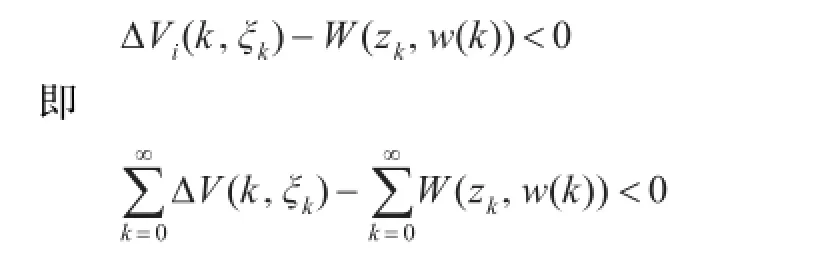
从而可得
I.当w(k)=0时,ΔV(k,ξk)<-γ-1zTkzk<0,可知系统(3)是鲁棒稳定的。
由I、II可知,系统(3)可以实现鲁棒H∞控制。又知系统(3)为系统(1)的增广系统,所以系统(1)可以实现鲁棒H∞控制。
当σ(k+1)=j,σ(k)=i时,证明可参考文献[11]。
注:在定理1所构造的Lyapunov泛函V3中选取Siτ=0,τ∈(1,d)且控制器(2)中的参数矩阵Aki,Bki和Dki为0时,定理1可以退化为文献[11]中的引理1。
4 仿真例子
考虑m=2时的系统(1),此时切换系统由两个子系统组成.其中系统参数如下:
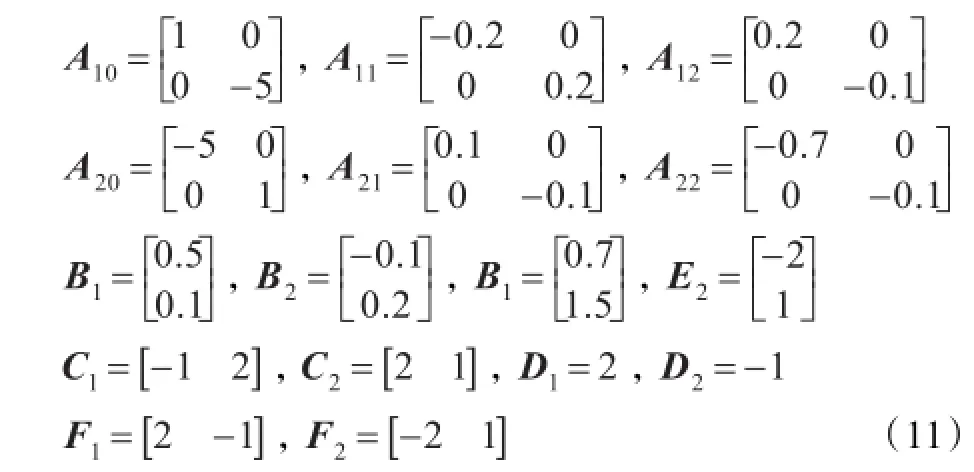
用MATLAB解不等式(4),当选取β12=β21=1,γ=1,α1=0.3,α2=0.7时,解得可行解P1,P2,K1,K2,Q11,Q12,Q21,Q22,S11,S12,S21,S22。
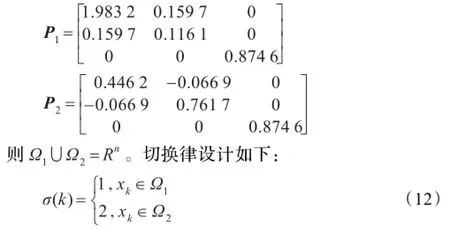
使系统(11)实现鲁棒H∞控制的切换动态输出反馈控制器增益矩阵为:

仿真结果见图1、2、3。其中:初始条件x(0)=[7-3]T,。从仿真曲线可以看出系统(11)在切换律(12)和动态输出反馈控制矩阵(13)作用下是鲁棒镇定的且满足指定的H∞性能指标γ。
系统的切换信号,如图1所示。
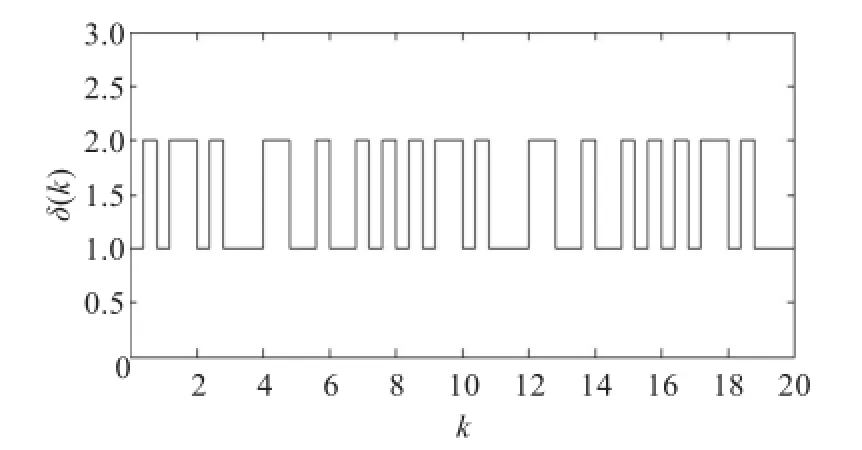
图1 系统的切换信号
系统的状态曲线,如图2所示。
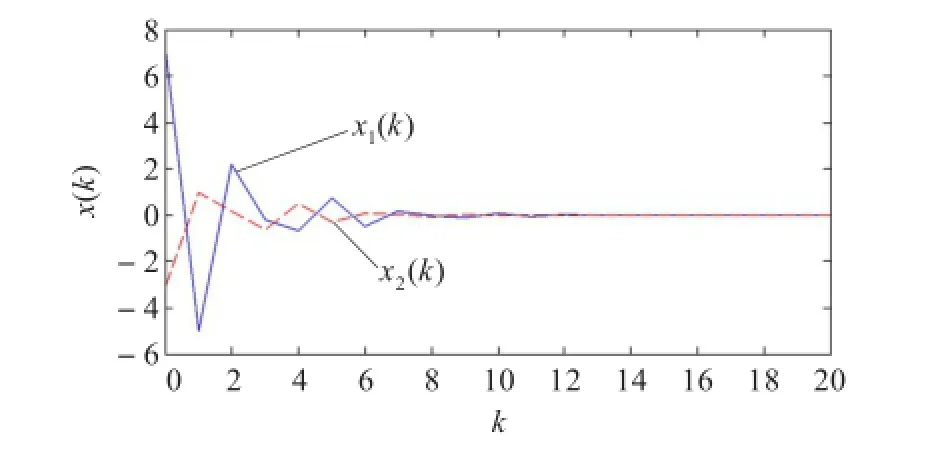
图2 系统的状态曲线
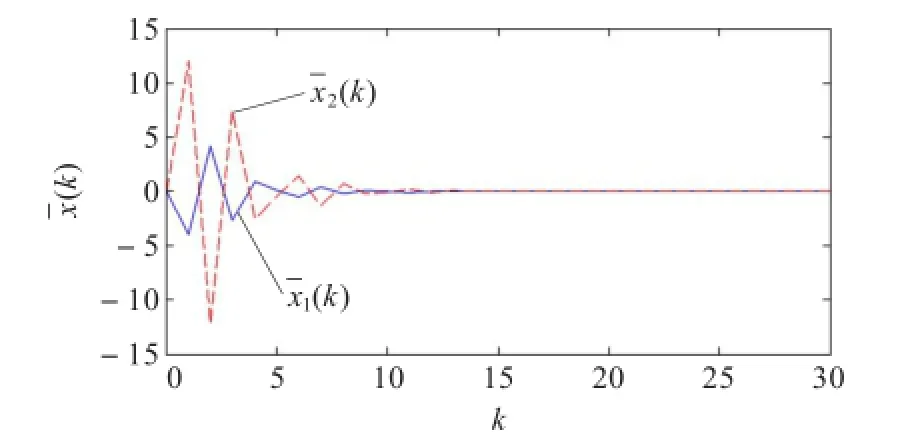
图3 )的状态曲线
5 结论
本文利用多Lyapunov函数方法研究一类具有多时滞的离散切换系统的动态输出反馈H∞控制问题。利用线性矩阵不等式给出了与时滞相关的使闭环系统实现鲁棒H∞控制的充分条件,同时还给出了切换律和鲁棒H∞控制器的设计方案。仿真结果验证了设计方法的有效性。
[1]Liberzzon D,Morse A S.Basic problems in stability and design of switched systems[J].IEEE Control Systems Magazine,1999,19(5):59-70.
[2]Sun Zhendong,Ge S S.Analysis and synthesis of switched linear control systems[J].Automatica,2005,41:181-195.[3]陈帼鸾,裴海龙,王耀鹏.基于平均逗留时间的线性切换系统稳定性分析[J].控制理论与应用,2007,26(4):24-26.
[4]王娟,何俊杰,张礼涛.一类离散非线性切换系统的稳定性[J].郑州大学学报:理学版,2004,44(4):16-20.
[5]张霞,高岩,夏尊铨.切换线性系统稳定性研究进展[J].控制与决策,2010,25(10):1441-1450.
[6]程代展,郭宇骞.切换系统进展[J].控制理论与应用,2005,22(6):954-960.
[7]李莉莉,赵军.一类非线性离散切换系统基于观测器的指数镇定[J].控制理论与应用,2009,26(7):786-790.
[8]王茂,樊友高,邱剑彬.饱和不确定离散切换系统的静态输出反馈控制[J].控制与决策,2010,25(10):1479-1483.
[9]孙文安,杨寅,裴炳南.不确定切换系统基于切换时间的动态输出反馈H∞控制[J].系统工程与电子技术,2013,35(3):609-615.
[10]Wang Min,Zhao Jun,Dimirovski G M.Dynamic output feedback Robust H∞control of uncertain switched nonlinear systems.International Journal of Control[J],Automation and Systems,2011,9(1):1-8.
[11]宋政一,聂宏,赵军.具有时变时滞的离散切换系统的鲁棒H∞控制[J].东北大学学报:自然科学版,2007,28(4):469-472.
[12]曹莹,罗文广,张昊,等.一类离散时滞切换系统的稳定性分析[J].微计算机信息,2012,28(9):493-495.
[13]刘毅,赵军.一类切换模糊时滞系统的状态反馈控制[J].控制与决策,2008,23(4):445-449.
[14]李娇,赵军.具有状态时滞的离散时间切换系统的H∞滤波器设计:依赖状态的切换方法[J].控制与决策,2012,27(11):1607-1615.
[15]吴江江,余世明.一类不确定离散多时滞系统的稳定性分析与鲁棒控制器设计[J].自动化技术与应用,2010,29(1):1-3.
[16]张霓,韩盛烨,邹涛.不确定多时滞离散切换系统的输出反馈镇定[J].控制工程,2012,19(2):232-234.
[17]Scherer C,Weland S.Lecture Notes DISC course on linear matrix inequalities in control[M].Berlin:Springer-verlag,1999.
RobustH∞dynamic output feedback control for a class of discrete time switched systems with multi-delay.
WANG Qing1,NIE Hong2
1.School of Information and Control Engineering,Liaoning Shihua University,Fushun,Liaoning 113001,China
2.School of Sciences,Liaoning Shihua University,Fushun,Liaoning 113001,China
Using multiple Lyapunov function,the problem of the robustH∞control is discussed for a class of discrete time switched systems with multi-delay.Assuming that theH∞control cannot be implemented in each individual subsystem and based on switching output feedback control,a delay-dependent and LMI-based sufficient condition is given for the system to be robustH∞stabilizable,and switching law and dynamic output feedback controller are designed.A simulation example is given to show the validity of the results.
discrete time switched systems;output feedback control;multi-delay;multiple Lyapunov function;robust H∞control
A
TP273
10.3778/j.issn.1002-8331.1407-0545
国家自然科学基金(No.61104058);辽宁省教育厅科学研究基金(No.L2014151)。
王强(1988—),男,硕士研究生,研究方向为工业过程的先进控制及应用;聂宏(1965—),女,博士,教授,硕士生导师,主要研究方向为切换系统与混杂控制、非线性系统模糊智能控制等。E-mail:wangqiang328628@163.com
2014-08-06
2014-10-24
1002-8331(2015)22-0214-04
CNKI网络优先出版:2015-03-20,http://www.cnki.net/kcms/detail/11.2127.TP.20150320.1509.009.html