基于微粒群算法的永磁同步发电机滑模控制
2015-11-04张敏唐东成张君跃易志威朱红萍陈微
张敏,唐东成,张君跃,易志威,朱红萍,陈微
湖南科技大学信息与电气工程学院,湖南湘潭411201
基于微粒群算法的永磁同步发电机滑模控制
张敏,唐东成,张君跃,易志威,朱红萍,陈微
湖南科技大学信息与电气工程学院,湖南湘潭411201
为了改善直驱永磁同步风力发电机控制系统的控制性能,设计了一种滑模控制器。运用Matlab/Simulink建立了直驱型永磁同步风力发电机的仿真模型。提出外环采用转速闭环控制控制策略,用于跟踪最佳转速,以实现风力发电系统的最大功率跟踪控制。针对转速闭环控制采用一种新型的趋近律设计了滑模控制器,并用微粒群优化算法对控制器参数进行寻优。所设计的控制器性能与比例积分(PI)控制器进行了对比,结果表明优化参数后的滑模控制器拥有更好的控制效果,同时也表明采用PSO算法进行控制器设计是有效、可行的。
风力发电;永磁同步发电机;滑模控制;微粒群优化算法
1 引言
直驱永磁同步发电机(Direct-drive Permanent Magnet Synchronous Generator,D-PMSG)的控制通常采用比例积分(Proportional Integral,PI)调节器[1-5],作为一种线性控制器,其具有原理简单、可靠性高等特点,是工业控制中应用最广的策略,尤其适用于可建立精确数学模型的确定性系统。然而,实际的物理系统与其数学模型之间总会存在差异,并且永磁同步发电机的数学模型具有非线性、强耦合等特点,因此,PI控制器难以实现电机的高性能控制。在风力发电系统中,系统有的运行参数并不精确可知,实际运行过程中会遇到阵风、风切变、负载变化等,如何在参数不精确可知的情况下使所设计的控制器具有简单的算法和较强的鲁棒性以及良好的动态品质,是风电系统研究中一个值得关注的问题。滑模变结构控制理论在解决上述问题上具有许多独特的优点,为风力发电系统提供了一种可参考的控制方法[6]。
高为炳院士于上世纪提出趋近律的概念,在国内外得到了广泛应用。为克服指数趋近律的缺点,文[7]对其做出了进一步的改进,得出一种新的趋近律—变指数趋近律。文[8-9]在指数趋近率基础上,引入终端吸引子与系统状态变量的幂函数,对滑模控制抖振进行了抑制,并提高了滑模趋近速度。这些新型趋近律能有效抑制滑模运动的抖动问题,但仍没有解决滑模控制参数整定等问题。
本文从直驱永磁同步发电机的转速控制性能出发,首先建立了D-PMSG模型,并提出滑模变结构的转速控制策略。与传统PI控制器相比,滑模控制器(Sliding Mode Control,SMC)具有对扰动与参数变化不敏感,响应速度快等优点。同时,针对SMC参数的优化问题做了研究。采用微粒群优化算法(Particle Swarm Optimization,PSO)离线优化SMC参数,思想简单、程序易于实现、需要调整的参数较少、收敛速度快、优化精度高。优化后的SMC拥有更好的稳态和动态性能以及抗扰能力,同时证明了采用粒子群优化算法进行SMC参数优化是有效可行的。
2 直驱永磁同步发电机数学模型
永磁直驱同步发电系统采用风轮机与永磁同步发电机直接相连的方式,利用全容量变频器实现并网发电;它具有直接驱动、结构简单、效率高等优点,因而在大型变速恒频风力发电系统中具有广阔的应用前景。直驱式永磁同步风电机组主要由风力机、永磁同步发电机和全功率变流器组成,机组联网运行示意图如图1所示。

图1 直驱式永磁同步风电机组主结构图
在d-q同步旋转坐标系下的永磁同步发电机电压方程如下:

式中定义q轴反电动势eq=ωeψf;d轴反电动势ed=0;ud,uq分别为定子电压d轴和q轴基波分量;Rs为定子电阻;id,iq分别为定子d轴和q轴电流基波分量;Ld,Lq分别为永磁同步发电机的d轴和q轴电感;ωe为电角速度,ψf为永磁体磁链。
机械运动方程为:

J为转子的转动惯量;Np为永磁同步发电机极对数;Bw为转动粘滞系数;Tm为风力机输入到永磁同步发电机转子的机械转矩。
风力发电用永磁同步发电机的永磁体多采用径向表面式分布(Ld=Lq),此时电磁转矩Te方程为:

从上式可以看出,永磁同步发电机的电磁转矩跟定子q轴电流成正比关系,所以通过调节iq即可控制电磁转矩Te,进而调节永磁同步发电机和风力机转速,使之跟随风速变化,运行于最佳叶尖速比状态。
在电机侧变流器控制外环采用转速环[1],内环采用d、q轴电流双闭环的控制[3-5]。转速控制框图如图2所示。

图2 SMC转速控制器
3 控制系统设计
滑模变结构控制本质上是一种不连续的开关型控制,它要求频繁、快速地切换系统的控制状态。从控制的目的来看,变结构控制主要是解决系统的镇定问题,即寻求控制使原点渐近稳定。而许多课题可以通过一定的变换使之成为这类调节器的设计。
本文应用文[8-9]提出的新型指数趋近率,将其应用于直驱永磁同步风力发电机的转速控制。以下式所示的典型系统为例对新型趋近律进行分析,设计新型滑模速度调节器,并用于永磁同步发电机速度调节系统中取代PI控制器。新型趋近律,其具体形式为[8]:

式中s为滑模面;X为系统状态量,且a、b、p、q、k、ε为设计参数,且a≥0、b≥0、p>q≥0(p与q均为奇数),k>0、ε>0。
取永磁同步发电机状态变量为:

式中ωe=Npωg;和ωg分别为转速给定和实际转子角速度由式(1)、(3)得:


选择线性滑模面s=cx1+x2,并对其求偏导有

由新型趋近律来速度设计控制器,结合式(4)(5)可得

4 PSO算法的优化SMC参数
为了解决传统趋近律方法设计的滑模控制中存在的矛盾,本文提出一种基于粒子群算法的滑模控制方法,以便使到达段的品质得到提高。第3章求出了滑模控制规律涉及了c、k、ε等控制参数的整定。一般可根据滑模可达条件以及控制性能指标,设计SMC参数。但是方法复杂且控制器参数难以整定、实际效果也不理想。于是采用PSO算法系统目标函数寻优,求取SMC的参数最优解。
PSO算法中,假设群体中共有m粒子,每个粒子在D维目标搜索空间中的位置可以认为是优化问题的一个潜在解,粒子性能优劣程度取决于待优化问题对应的目标函数值,每个粒子由一个速度决定其飞行的方向和速率的大小,粒子们追随当前的最优粒子在解空间中进行搜索,直至得到满足条件的解。基本粒子群优化算法的搜索过程表达式如下[10]:

其中V为粒子速度,X为粒子位置,ω为惯性权重,P为个体最优位置,G为种群的全局最优位置,rand1和rand2服从[01]均匀分布,c1和c2为学习因子。
在粒子群优化算法运行前,还必须定义优化问题所对应的目标函数。SMC参数优化的目标在于提高系统的响应速度,减小超调量和稳态误差,同时还要保证趋近律的到达条件。描述控制系统性能的目标函数主要有ISE,ITSE,IAE,ITAE[11-15]等,这里选用积分型误差指标ITAE,它的表达式为:

其中e(t)是实际值与期望值之间的误差。在ITAE指标的基础上,目标函数选择如下:

其中s为滑模切换函数输出,α、β为权值。其中αt|s|项可以保证系统在有限的时间内到达滑模面,进而实现滑模运动。βt|e(t)|项是惩罚函数,可以限制启动超调量。将该目标函数作为PSO寻优的适应度函数。并把PSO中的粒子的位置X依次赋值给SMC控制器参数c、k、ε,然后运行控制系统的Simulink模型,得到该组参数对应的性能指标,即作为PSO中粒子的适应度值。算法具体过程如下。
(1)初始化m个粒子作为初始种群,随机产生所有粒子的位置X和速度V。粒子位置对应于SMC控制器中待定参数值。并确定粒子迄今为止搜索到的最优位置G和局部整个粒子群迄今为止搜索到的最优位置P。
(2)对每个粒子,将其适应值与该粒子所经历过的最优位置G的适应值进行比较,将较好的作为当前G。
(3)对每个粒子,将其适应值与整个粒子群所经历过的最优位置P的适应值进行比较,将较好的作为当前P。
(4)更新粒子的速度和位置。
(5)如果没有满足终止条件(通常为预设的迭代次数和适应值下限值),则返回步骤(2),否则,退出算法,得到最优解。
5 仿真分析
本文运用Matlab/Simulink建立上述D-PMSG仿真模型,如图3所示,包括风力机、永磁同步发电机模型,以及桨距角控制模型[1]。其中电机侧变流器控制框图如图2所示。同步发电机数学模型由式(1)~(3)微分和代数方程得到。

图3 D-PMSG模型及控制框图
风力机控制中采用了变浆控制,本文设计的以风速和功率作为输入信号的桨距角控制器见图4。桨距角的大小对Cp的影响较大,其作用类似于发电机的调速器[2]。图中:VwN为额定风速;Vw为实际风速;Peref为功率参考值,忽略功率损耗时,Peref可由式(1)确定;Pe为实际功率;max表示取2个输入信号中较大值,用于保证只有当实际风速高于额定桨距角时桨距角控制器才起作用;kv为比例控制参数;θ为桨距角。
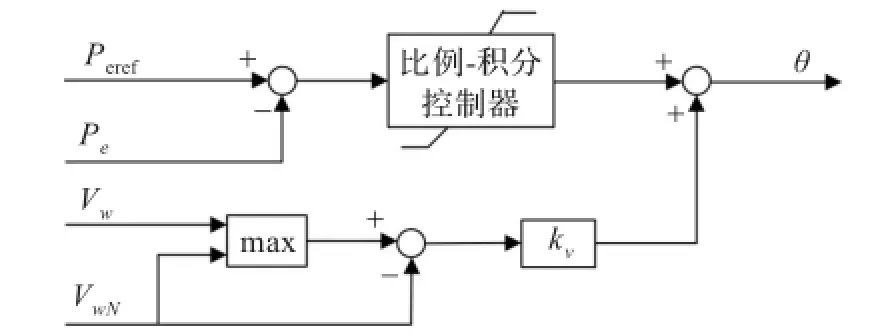
图4 桨距角控制器
主要参数为:D-PMSG的额定容量为2.5 MW;定子电阻为Rs=0.01 Ω;电感L=0.003 H;极对数Np=32;额定风速VwN=12 m/s;风力机转子半径Rt=42 m;等效转动惯量J=8×103kgm2;转动粘滞系数Bw=0。
设定算法迭代50次,ω=0.6,c1=2和c2=2,风速为10 m/s,系统运行时间为0.5 s;当目标函数权重系数为α,β取不同值时,各参数与适应度值如表1所示。

表1 不同权值下的SMC整定参数
图5是性能指标在不同权重时的最优个体适应度值,它表明在不同性能指标下,虽然所求得的最小适应度值不同,但是并不影响最优个体的求取,如表中优化所得到的参数均能使系统具有很好的控制性能。

图5 不同权值时最优个体适应度曲线
为了研究不同性能指标下SMC与PI控制的效果,分别选取了不同性能指标范围下SMC与PI的仿真参数中的一组参数对转速进行控制。在这些控制参数作用下对转速响应曲线进行比较分析,并求取了超调量δ%和稳态误差ess(如表2)。从稳态误差角度来说,PI控制的误差数量级较小,这主要是因为滑模SMC控制存在抖振等因素;但是SMC的稳态误差也比较小,在实际工程中仍能达到控制要求。此外,采用SMC控制的转速运行曲线超调量δ在同一性能指标范围内明显要优于PI控制。通过综合分析,表明本文采用SMC控制性能要优于PI控制。

表2 不同性能指标下SMC与PI的参数及部分性能
正如图6所示的永磁同步发电机转速曲线,图中实线是经PSO算法优化后的滑模控制,虚线则表明常规的PI控制,显然当PI控制具有快速响应时,超调量很大;而SMC控制既能保证响应速度快,转速响应超调量很小;由此可见,采用PSO算法优化后的滑模控制器具有更好的控制性能。
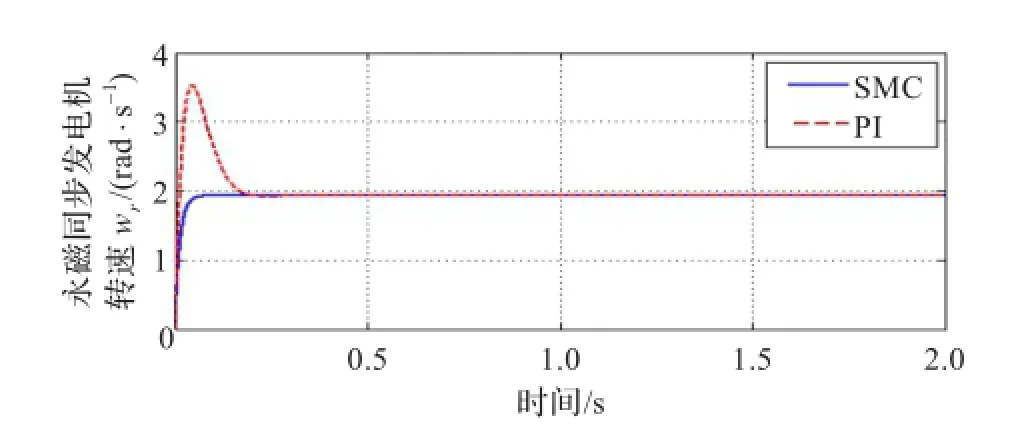
图6 优化参数后永磁同步发电机转速
风力发电机在实际运行过程中会遇到阵风、风切变、负载变化等复杂情况,一方面要保证系统运行稳定,另一方面还要最大限度地捕获风能,提高风力发电机的运行效率。这就要求系统能跟踪风速变化,工作在最佳转速。为了研究优化后SMC控制性能,在1 s时,静态风速由5 m/s跃变至13 m/s。当风速超过额定风速以后,变浆控制系统起作用,从而限制了风力机的风能捕获。图7表明了SMC控制能有效控制风力发电机转速。图8为永磁同步风力发电机所发出的电磁功率,随风速变大,所捕获的风能也随之增加。

图7 风速阶跃时永磁同步发电机转速曲线

图8 永磁同步发电机电磁功率
对于永磁同步发电机来说,由于发电机内环采用电流环,而d轴采用id=0的控制方式,所以,d轴电流被控制于id=0处,如图9所示,显然在SMC控制时,d轴电流更趋于0,控制精度也高;如图10所示,永磁同步电机控制系统稳态运行时的q轴电流响应也表明SMC具有良好的稳态性能。
风力机所处环境风速随机性,波动性等动态变化特点。进一步研究了参数优化的SMC控制对永磁同步风力发电机在动态风况下的运行状况,风速设定为v=,由ωgopt=λoptv/Rt得到转速给定;其中λopt=8.1。显然PI控制对于动态跟踪控制略显不足,而SMC却能满足跟踪性能。
仿真分析表明,虽然PI控制具有算法简单、可靠性高及调整方便等优点;但是永磁同步发电机是一个多变量、强耦合、非线性、变参数的复杂对象,采用常规PI控制虽然在一定范围内能满足控制要求;在系统参数发生变化或受到外界不确定因素的影响时,并不能满足高性能控制的要求。由于滑模控制器可使系统的状态变量在滑模面上运动;当选择适当的滑模趋近律时,系统状态变量轨迹离滑模面较远时,趋近规律使状态量轨迹趋向滑模面,提高了趋近速度,而当接近滑模面时,趋近律速度接近为零,这样既有效地减小了进入滑模面的初始系统抖振,也明显改善系统控制性能。

图9 永磁同步发电机d轴电流

图10 永磁同步发电机q轴电流

图11 永磁同步发电机转速
6 结束语
本文提出直驱永磁同步转速滑模变结构控制器,能对扰动大的系统有很好的控制性能,大大改善了系统鲁棒性,提高了系统的响应速度,也论证了本文的控制策略的正确性和可行性。采用PSO算法对滑模控制器参数的离线优化可使控制性能得到改善。优化后的SMC拥有更好的稳态和动态性能以及抗扰能力,同时证明了采用粒子群优化算法进行SMC参数优化是有效可行的。
[1]尹明,李庚银,张建成,等.直驱式永磁同步发电机组建模及其控制策略[J].电网技术,2007,31(15):61-65.
[2]姚骏,廖勇,瞿兴鸿,等.直驱永磁同步风力发电机的最佳风能跟踪控制[J].电网技术,2008,32(10):11-15.
[3]姚骏,廖勇,瞿兴鸿,等.直驱永磁同步风力发电机单位功率因数控制[J].电机与控制学报,2010,14(6):13-20.
[4]严干贵,魏治成,穆钢,等.直驱永磁同步风电机组的最优功率运行控制[J].电机与控制学报,2009,13(1):56-61.
[5]严干贵,魏治成,穆钢,等.直驱永磁同步风电机组的动态建模与运行控制[J].电力系统及其自动化学报,2009,21(6):34-39.
[6]杨俊华,吴捷.风力发电机组的非线性控制[J].动力工程,2003,23(6):2803-2809.
[7]童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.
[8]张晓光,赵克,孙力,等.永磁同步电动机滑模变结构调速系统新型趋近律控制[J].中国电机工程学报,2011,31(24):77-82.
[9]张晓光,赵克,孙力,等.永磁同步电机滑模变结构调速系统动态品质控制[J].中国电机工程学报,2011,31(15):47-52.
[10]Shi Y,Eberhart R C.A modified particle swarm optimizer[C]//IEEE International Conference of Evolutionary Computation,Anchorage,Alaska,May 1998.
[11]徐峰,李东海,薛亚丽.基于ITAE指标的PID参数整定方法比较研究[J].中国电机工程学报,2003,23(8):206-210.
[12]周国鹏,柳学坤,何晋元.基于控制系统优化的ITSE目标函数的研究[J].微计算机信息,2006(8):46-47.
[13]张福波,王国栋,张殿华,等.PID控制器参数的ITAE最佳设定公式[J].东北大学学报,2005(8):755-758.
[14]朱红萍,罗隆福.基于ITAE指标的PID控制器参数优化设计[J].电气自动化,2009(6):37-39.
[15]王介生,王金城,王伟.基于粒子群算法的PID控制器参数自整定[J].控制与决策,2005,20(1):73-81.
Permanent magnet synchronous generation based on particle swarm optimized sliding mode control strategy.
ZHANG Min,TANG Dongcheng,ZHANG Junyue,YI Zhiwei,ZHU Hongping,CHEN Wei
School of Information and Electrical Engineering,Hunan University of Science and Technology,Xiangtan,Hunan 411201,China
A sliding mode controller with Particle Swarm Optimization(PSO)algorithm optimization of the controller parameters is designed to enhance the performances of Direct-drive Permanent Magnet Synchronous Generator(D-PMSG)control system.The results indicate that the sliding mode controller has better performance compared with traditional Proportional Integral(PI)controller,and the PSO algorithm is proved valid for the design of sliding mode controller in addition. Key words:wind power;Permanent Magnet Synchronous Generator;sliding mode control;Particle Swarm Optimization(PSO)
A
TP27;TM714
10.3778/j.issn.1002-8331.1311-0166
湖南省教育厅重点项目(No.13A021);湖南省研究生科研创新项目(No.CX2013B403);湖南省自然科学基金(No.11JJ9013);湖南省教育厅科学项目(No.11K027)。
张敏(1963—),男,教授,博士,硕士生导师,主要从事非线性控制系统分析与控制等教学与科研工作;唐东成(1987—),男,硕士研究生,研究方向为复杂系统分析与控制。E-mail:tangdongcheng1028@126.com
2013-11-12
2014-02-21
1002-8331(2015)22-0266-05
CNKI网络优先出版:2014-11-04,http://www.cnki.net/kcms/doi/10.3778/j.issn.1002-8331.1311-0166.html
