屋面轨道式擦窗机起升动载系数分析
2015-11-04郑夕健时海洋常晓华
郑夕健,时海洋,常晓华,刘 旭
(1.沈阳建筑大学 机械工程学院,辽宁 沈阳 110168;2.辽宁省安全科学研究院,辽宁 沈阳 110003)
屋面轨道式擦窗机起升动载系数分析
郑夕健1,时海洋1,常晓华2,刘 旭1
(1.沈阳建筑大学 机械工程学院,辽宁 沈阳 110168;2.辽宁省安全科学研究院,辽宁 沈阳 110003)
以CWGS250屋面轨道式擦窗机为研究对象,通过ANSYS软件建立擦窗机整机有限元模型,对整机进行模态和瞬态动力学分析,得出前五阶振型、不同起升时间下的时程位移曲线及起升动载系数,通过与国内外规范进行对比,确定了合理的起升时间及起升动载系数,为擦窗机的使用和设计提供理论参考。
擦窗机;瞬态动力学分析;起升动载系数;ANSYS软件
擦窗机在工作时需要频繁的对吊重进行起升和下降作业,当吊重运动状态发生改变时,会对承载结构和传动机构产生附加动载荷作用,引起整机的不稳定振动,这种动载荷是擦窗机设计中所要考虑的重要载荷之一,但新版国标擦窗机中并未对擦窗机的起升动载系数给予明确的数值,而是按照起重机设计标准中的数值规定的,因此对于擦窗机而言,起升动载系数的取值是一个值得探讨的问题。
本文以CWGS250屋面轨道式擦窗机为研究对象,结合整机结构及承载能力,针对起升机构在悬吊过程中的突然起升或下降,应用ANSYS软件,建立整机有限元模型,通过模态分析、瞬态动力学分析,得出擦窗机起升动载系数,为擦窗机同类产品的设计提供理论依据。
1 整机有限元模型
以CWGS250屋面轨道式擦窗机为研究对象(图1),对整机系统建立计算模型。
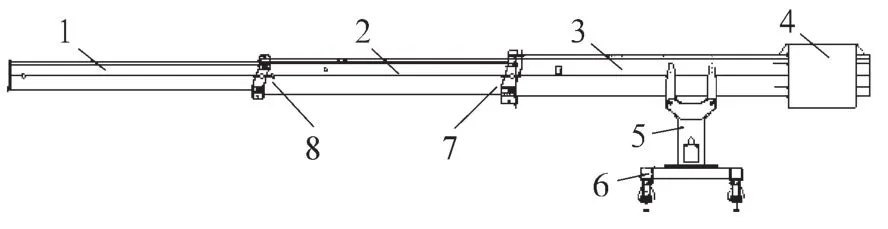
图1 屋面轨道式擦窗机结构简图
该型号擦窗机主要性能参数如下。
起升高度(m) 173
吊船额定载荷(kg) 250
起升速度(m/s) 0.17
吊臂伸出长度(m) 15.2
轮距(m) 2
轨距(m) 2
1.1 模型的基本假设
擦窗机结构的主要组成有:行走机构、底架、回转机构、起升机构、立柱、配重、基臂、二节臂、一节臂、羊角臂头等。在有限元建模中,通常必须对实体进行一些合理的简化,本文为了便于分析并能反映结构实际工作状态,对模型进行如下简化处理。
1)不考虑焊缝材料特性的变化,认为焊接质量可靠。
2)用等效质量单元代替吊臂前端的倾覆荷载(含羊角臂头、钢丝绳、吊篮等自重)及抗倾覆荷载(配重的自重)。
3)忽略结构中直径尺寸小于10mm的圆角及较小的倒角。
4)挡板间用销轴连接处、两臂搭接处的前托轮后尾轮导向轮均建立耦合以模拟连接,立柱与底架连接处做刚化处理以模拟实际结构。
5)忽略对结构整体强度、刚度影响较小的部件和装置。
1.2 模型的建立
本文所研究的擦窗机吊臂采用齿轮齿条传动,各节臂、连接板、立柱和底架均属于薄板类型,根据擦窗机结构的特点,选用shell63,Mass21单元类型,整机主体材料为Q345,前托轮和后尾轮材料为45号钢,其密度为7.8e-9t/ mm3,弹性模量2.1e5MPa,泊松比取0.3,有限元规模为:节点数24 319个,单元数23 889个。整机有限元模型如图2所示。

图2 整机有限元模型
2 整机模态分析
模态分析是瞬态动力学分析的基础,由振动理论可知,对于一个多自由度振动系统,系统低阶固有频率对系统的动态响应影响较大,而高阶固有频率则影响较小[6]。ANSYS软件中,共有7种提取模态的方法,其中最常用的为Block Lanczos法和Subspace法,由于Block Lanczos法适宜提取复杂模型的模态,且具有很高的效率和精度,因此本文采用该方法来进行模型的模态求解,本文只提取起重臂的前五阶模态,实际分析设计中,可以根据需要获取模态阶次。擦窗机前五阶频率如表1所示,振型图如图3所示。

表1 各阶模态频率

图3 前五阶振型图
由振型图可知,擦窗机整机结构第一、二、四阶振型主要为伸缩臂在水平面的振动,第三阶振型主要为伸缩臂在起升平面的振动,第五阶振型主要为伸缩臂沿起升平面的弯扭。总体来看,擦窗机整机结构为一低频振动系统,吊船起升时的冲击容易引起结构共振,因此,合理的起升对整机安全性有重要意义[7]。
3 起升动载系数分析
3.1 时程位移曲线
吊船起升时,吊船质量以集中力的形式施加到伸缩臂前端,从而可得吊船在整个起升过程中对吊臂的冲击加载过程[5],如图4所示。
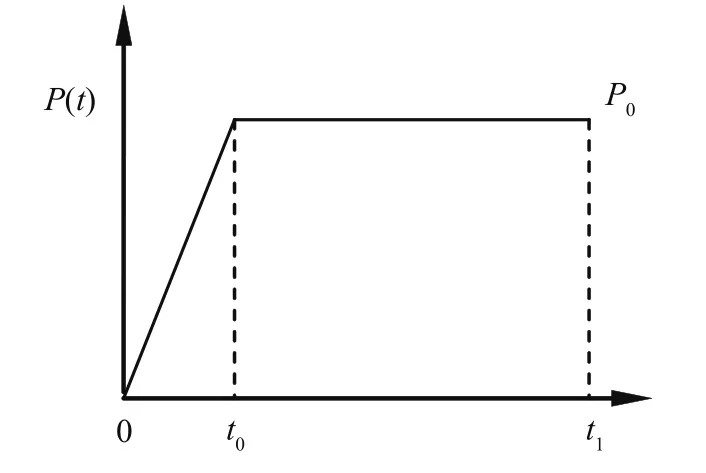
图4 擦窗机所受冲击载荷
则吊船在整个离地起升过程中对擦窗机的冲击载荷P(t)可用下式来进行表示
式中 P0——起升载荷;
t0——为起升时间。
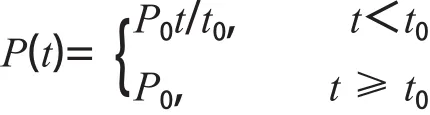
本文中分别取吊船起升时间t0=0.1s、0.2s、0.3s、0.5s、1s,t1=2s的时间完成整个起升过程,采用约简矩阵(Reduced Matrices)方法,定义二节臂臂头起升方向为主自由度,以零载荷和额定载荷分两步施加载荷并定义时间增量,通过ANSYS的后处理器POST26,得到擦窗机额载起升工况下,二节臂臂头垂直方向的时程位移曲线,图5a给出了t0取0.1s的时程位移曲线,图5b给出了t0分别取0.2s、0.3s、0.5s和1s的时程位移曲线。
由图5可知,在起升载荷激励下,擦窗机二节臂臂头处产生明显的振动,其最大振幅均出现在t0附近,随着起升时间的增加,最大振幅逐渐减小,在阻尼的作用下,振幅趋于平稳。
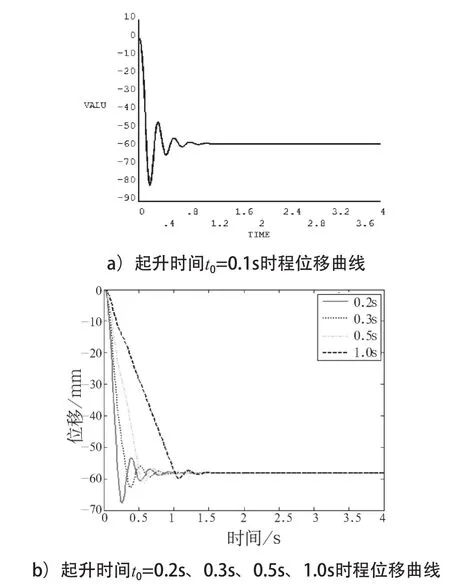
图5 擦窗机时程位移曲线
3.2 起升动载系数的计算
通常用起升载荷动载系数乘以额定起升载荷来表示起升动载荷的大小。其中,起升动载系数值由下列公式确定[3]。
式中 δd——为吊臂臂端最大动位移;
δs——吊臂臂端最大静位移。
通过ANSYS后处理器中的List Variables选择查询各个起升时间下最大动位移和最大静位移,并由此可计算出擦窗机起升动载系数如表2。
由表2可以发现,起升时间在0.1~0.2s内,起升动载系数变化显著,因此对0.1~0.2s的范围内选择步长0.01s进行细化分析如表3所示。
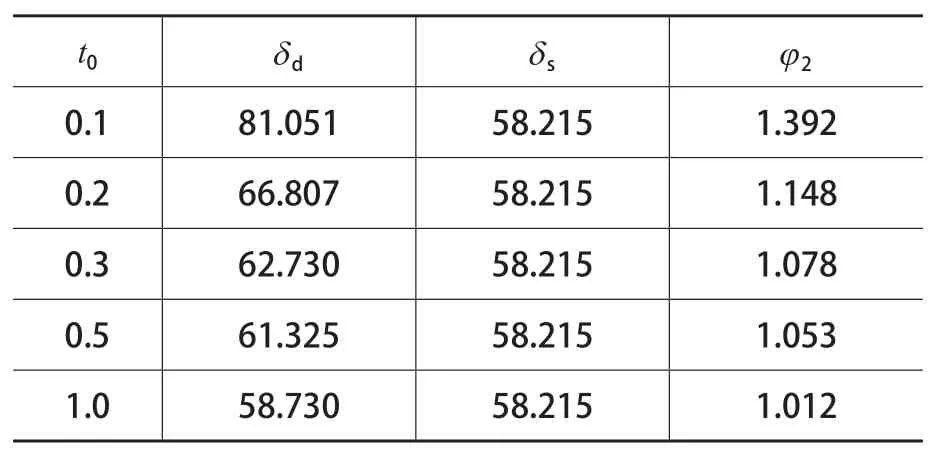
表2 不同起升时间下的起升动载系数
由表2和表3中的数据,绘制成擦窗机的起升动载系数与不同起升时间下的关系图,如图6所示。
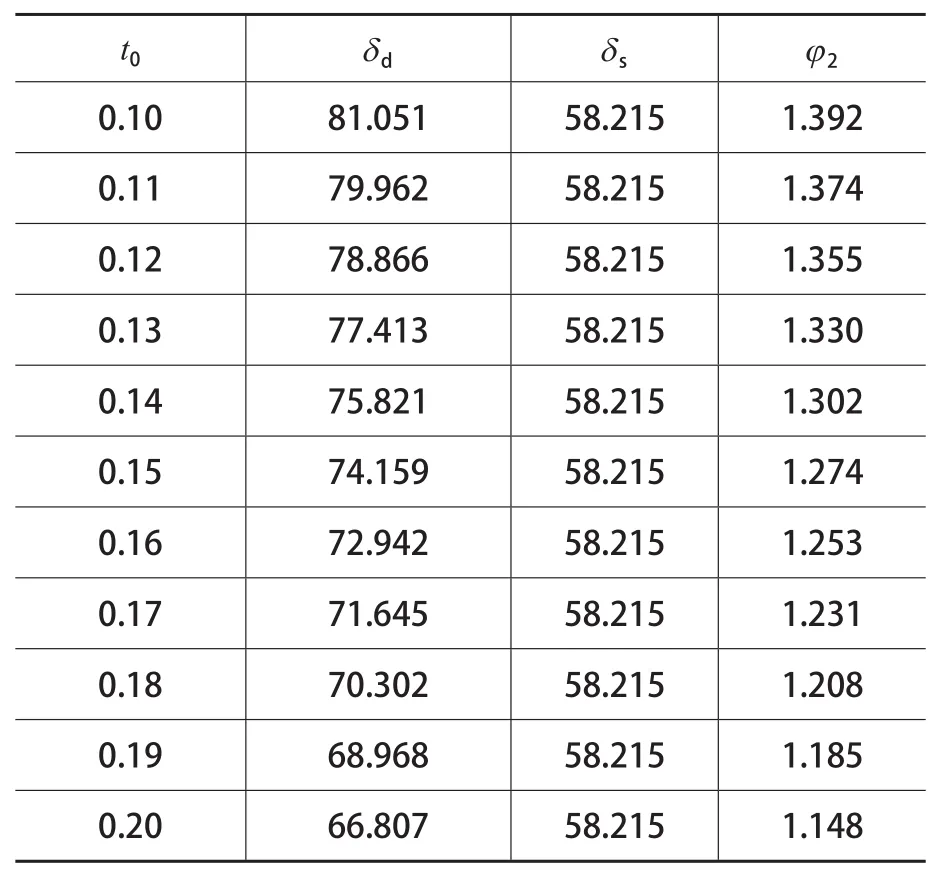
表3 起升时间在0.1~0.2s内起升动载系数
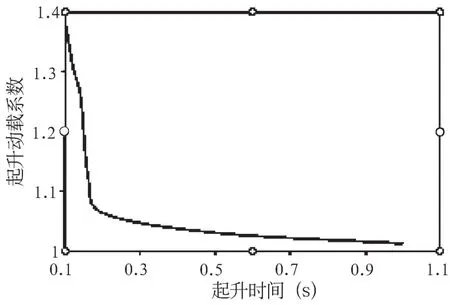
图6 起升动载系数与起升时间的关系
由表2、表3和图6可知,起升时间在0.1~1s内,起升动载系数值由1.392下降到1.012,而起升时间在0.1~0.2s内,起升动载系数由1.392下降到1.148,由此可见,在0.1~0.2s内起升动载系数下降显著,说明在0.1~0.2s内擦窗机伸缩臂结构所受的冲击惯性力较大。
4 起升动载系数的比较
擦窗机国家标准中对于起升动载系数的规定是参照起重机而来的,在各个国家的起重机设计规范中,均将起重设备分为四个等级,对不同等级的起重设备采用不同的计算公式,由于擦窗机离地起升为轻微冲击,故选取起升等级为HC2,在欧洲搬运协会标准(FEM1.001/1-1987)中φ2的计算由下列公式确定[4]

式中 φ2min—— 与起升级别相对应的起升动载系数最小值,查欧洲搬运协会标准取1.10;
β2—— 按起升状态级别设定的系数查标准取0.34;
vq—— 稳定起升速度0.17m/s。
经计算擦窗机的起升动载系数为1.1578。
现将德国工业标准(DIN 15018)和擦窗机(GB 19154-2013)中计算出的起升动载系数列于表4。

表4 几种标准下的起升动载系数值
将表3和表4中的结果统计并进行比较,如表5所示。通过表5可以得知,起升时间在0.2s时,起升动载系数值为1.148,与FEM 1.001/1-1987相比误差最小,为0.85% ;起升时间在0.18s时,起升动载系数值为1.208,与DIN 15018相比误差最小,为0.30% ;起升时间在0.16s时,起升动载系数值为1.253,与GB 19154-2013相比误差最小,为0.24%。

表5 起升动载系数的比较
5 结 论
本文以CWGS250屋面轨道式擦窗机为研究对象,通过有限元软件ANSYS对整机进行模态分析和瞬态动力学分析得出的主要结论如下。
1)通过对擦窗机整机建立有限元模型,对整机进行模态分析,得出整机前5阶振型及其频率,由前5阶振型图可知吊船快速起升容易导致整机共振,因此必须合理规范起升时间。
2)运用ANSYS软件中的缩减法对整机进行瞬态动力学分析,得出在额载起升工况下,不同起升时间的时程位移曲线,结果表明二节臂臂头处的最大位移随起升时间的增加逐渐减小。
3)通过公式计算出不同起升时间下的起升动载系数φ2值,给出了起升动载系数与起升时间的关系曲线。结果表明随着起升时间的增加,φ2值逐渐减小,在0.1~0.2s内,φ2值下降显著,在0.2~1s内,φ2值下降缓慢,说明起升时间在0.1~0.2s内起升载荷对擦窗机结构的冲击较为明显。
4)通过本文分析所得的起升动载系数 值与国内外标准进行对比可知,本文推荐的起升时间和起升动载系数φ2值见表6,由此可见起升时间在0.16~0.20s范围内较为合理,若起升时间小于0.16s,擦窗机将偏于不安全,若起升时间大于0.2s将影响擦窗机起升效率。本文分析方法能充分体现φ2值随起升时间的变化情况,擦窗机的使用和设计提供了理论参考。
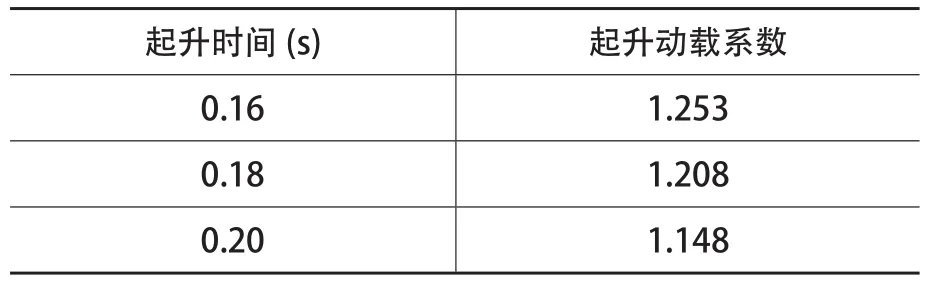
表6 本文推荐的起升动载系数
[1]成 强.轮胎集装箱门式起重机起升动载系数的有限元计算[J].机械制造,2013,(6):11-13.
[2]师素娟,刘 龑.基于ANSYS的履带起重机桁架式起重臂模态分析[J].建筑机械,2012,(4):82-84.
[3]成大先.机械设计手册(第五版)[M].北京:化学工业出版社,2007.
[4]夏拥军,陆念力,罗 冰.关于水平臂式塔机起升动载系数的一点讨论[J].工程机械,2005,(1):32-36.
[5]黄日龙,田家录,谢家学.擦窗机伸缩臂的振动响应分析[J].江南大学学报,2014,(4):184-188.
[6]沙大亮.平头塔式起重机起重臂的模态分析与比较[J].建筑机械化,2008,(8):31-33.
[7]董 杰,漆 静.门式起重机起升过程动态特性研究[J].机械设计与制造,2014,(6):79-82.
(编辑 贾泽辉)
更 正
2015年第6期(总第317期)第78~80页《挖掘机进气系统故障排除案例分析》(作者:郭乐,徐威,张超)一文中,图3、图4分别应为如下所示。
Analysis of the rail type building maintenance unit on the roof hoisting dynamic load coeffi cient
ZHENG Xi-jian, SHI Hai-yang, CHANG Xiao-hua, LIU Xu
图3 胶层脱落位置图
图4 新的进气管路
住房和城乡建设部科学技术计划项目(2015-K3-018)
TU976+.42;TM403.1
B
1001-1366(2015)08-0045-05
2015-06-30
