基于六西格玛方法的液压系统故障诊断研究
2015-11-04郑建丰ZHENGJianfeng
郑建丰/ZHENG Jian-feng
(徐工集团工程机械股份有限公司道路机械分公司,江苏 徐州 221004)
基于六西格玛方法的液压系统故障诊断研究
Research of hydraulic system fault diagnosis based on 6-sigma methodology
郑建丰/ZHENG Jian-feng
(徐工集团工程机械股份有限公司道路机械分公司,江苏 徐州 221004)
采用六西格玛改进的模式—DMAIC方法,对混凝土输送泵故障进行了深入分析。通过界定故障范围,测定和分析导致故障问题的关键因素,提出改进及控制措施。该方法将六西格玛理论成功引入到液压系统故障诊断分析中,对实际应用具有重要的意义。
混凝土泵;六西格玛;液压系统;故障诊断
液压系统作为工程机械的核心子系统,其工作的稳定性与可靠性将直接影响到整机的性能及施工质量。由于液压系统的逻辑关系及结构较为复杂,一旦发生故障就会令工程技术人员无从下手。因此,采用有效的手段及时地判断并排除故障,就显得尤为重要。六西格玛方法是一套严谨而完整的解决问题的有效方法,该方法从定义问题开始,通过系统测量、分析原因并实施改进,将整个过程都建立在系统分析的基础上,可以帮助技术人员以科学的方式认识、分析并解决问题,达到效率更高、解决问题更彻底的目的。
本文以HBT60混凝土泵液压系统为研究对象,介绍了六西格玛改进模式(DMAIC)的定性分析方法在故障诊断中的应用,验证了该方法在液压系统故障诊断中的有效性。
1 HBT60混凝土泵液压系统简介
HBT60型混凝土输送泵液压系统原理图如图1所示。整个液压系统由主泵送系统、分配阀控制系统和搅拌辅助系统组成。主泵送系统和分配阀控制系统共用同一个油源主泵4,通过换向阀7、8和10、11将两个系统的执行机构主泵送系统的泵送油缸5和分配阀控制系统的摆缸13联系在一起,按“推挽”方式依次工作。逻辑取信阀27用于控制液动换向阀11的换向,进而控制摆缸13的切换;当摆缸13切换完毕,导通液动换向阀7的控制油路,进而控制送料油缸5的换向动作,进入下一个循环,如此往复,完成混凝土的泵送工作。
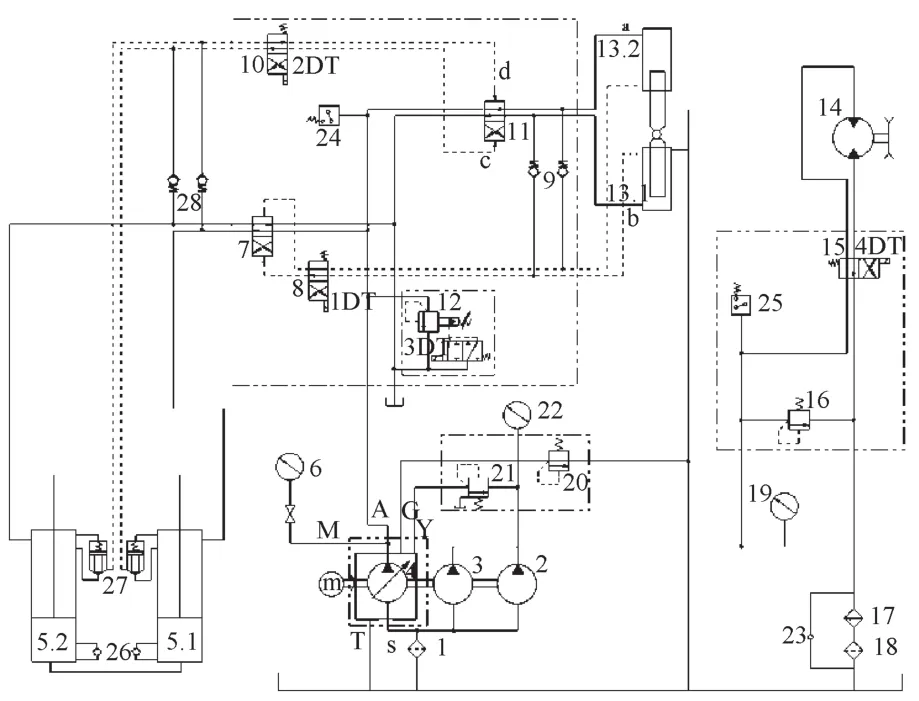
图1 HBT60型混凝土泵液压系统
2 DMAIC六西格玛的模式
DMAIC是六西格玛管理中流程改善的重要工具。DMAIC是指界定(Define)、测量(Measure)、分析(Analyze)、改进(Improve)、控制(Control)5个阶段构成的过程改进方法,一般用于对现有流程的改进,包括制造过程、服务过程以及工作过程等等。
综上所述,可以得出基于六西格玛改进的液压系统故障诊断各阶段的主要工作,如图2所示。
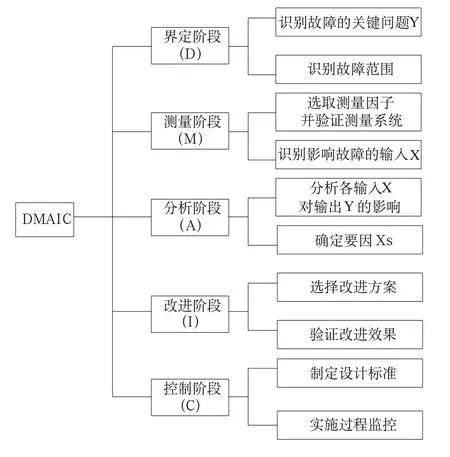
图2 液压系统故障诊断的DMAIC模式
3 基于DMAIC模式的混凝土泵液压系统故障诊断
3.1 界定阶段(D)
故障信息来源于顾客对HBT60混凝土泵工作时动作不稳定的抱怨。故障描述:HBT60混凝土输送设备在工作时运动不稳定。
识别故障的关键问题Y,可以采用树图工具对故障进行展开,如图3所示。进一步确认,混凝土泵工作不稳定故障的关键问题Y为:分配阀摆缸摆动时有停顿。
识别故障范围,采用流程图进行分析,找出对关键问题Y有影响的元件,如图4所示。由于主泵送系统无故障出现,所以与摆缸运动相关的元件有4个:液控换向阀11、摆缸13、逻辑阀27和单向阀28,故障元件应该在这个集合中。
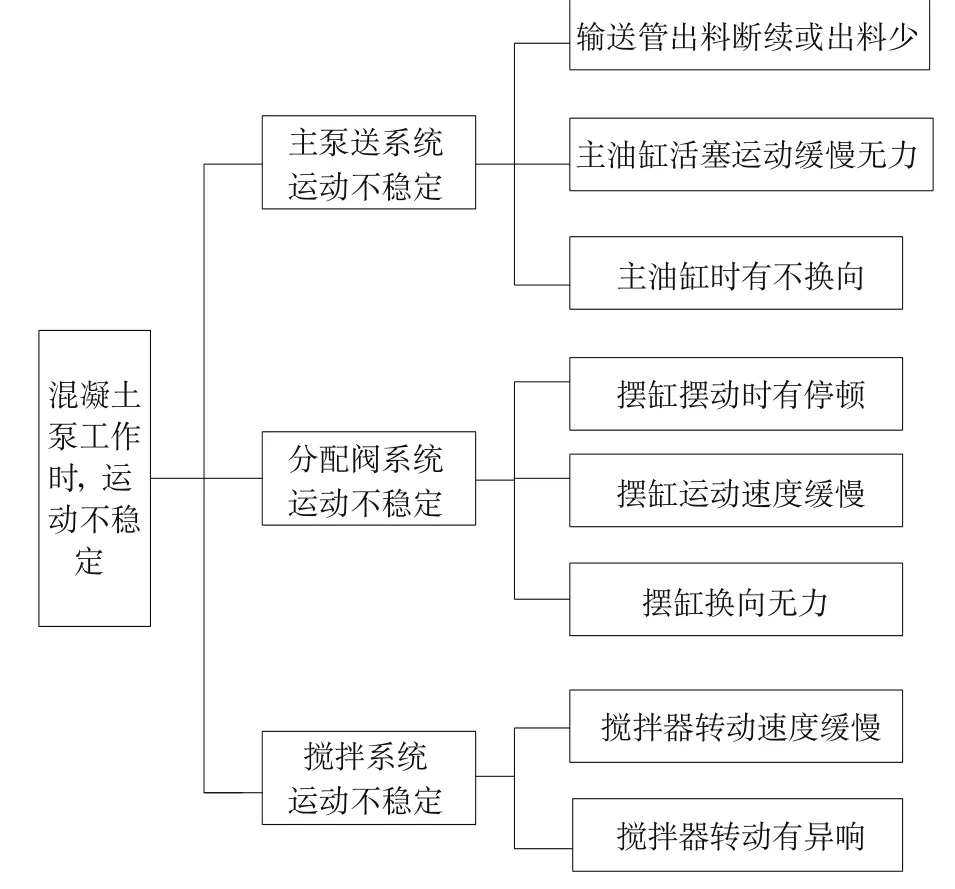
图3 混凝土泵工作不稳定的树图
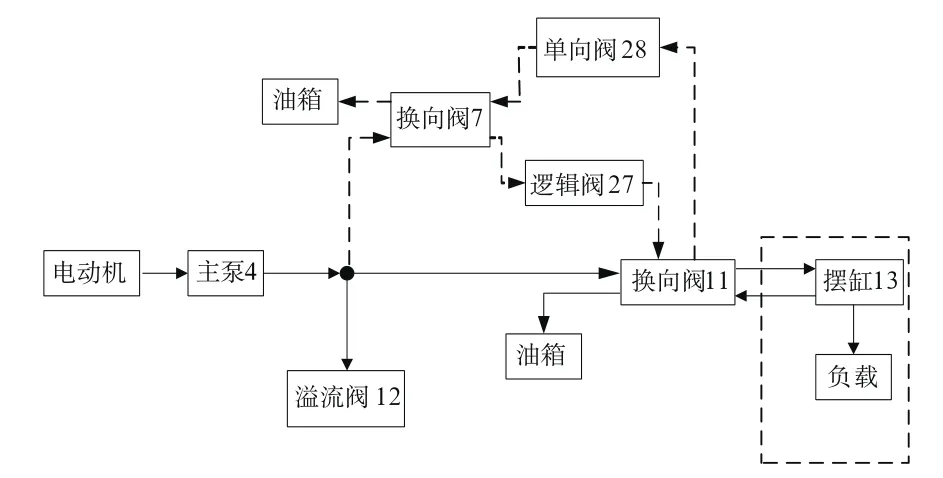
图4 摆缸13运动的流程图
3.2 测量阶段(M)
由于摆缸运动除受摆缸机构自身不稳定的影响之外,主要受摆缸主油路压力及控制压力影响较大。所以在此选用主油路压力和控制油路压力为测量因子,摆缸位移为观察因子。在该系统中,由于使用了精度较高,已验证为可靠的压力测试仪对测量因子的检测,所以在此不予考虑测量系统对测量数据的影响。
识别影响故障的输入X,利用故障树工具,选定摆缸运动不稳定为顶事件,采用人工建树方法,建立故障树模型如图5所示。通过建树过程系统的了解造成系统故障的各子系统或元部件之间的关系,找出薄弱环节,以便通过实验的方法排除不可能的情况,最终找出故障的根源,同时也为故障树定性分析提供依据。
故障树中各符号的意义见表1。
如图5所示的故障树,其状态向量为

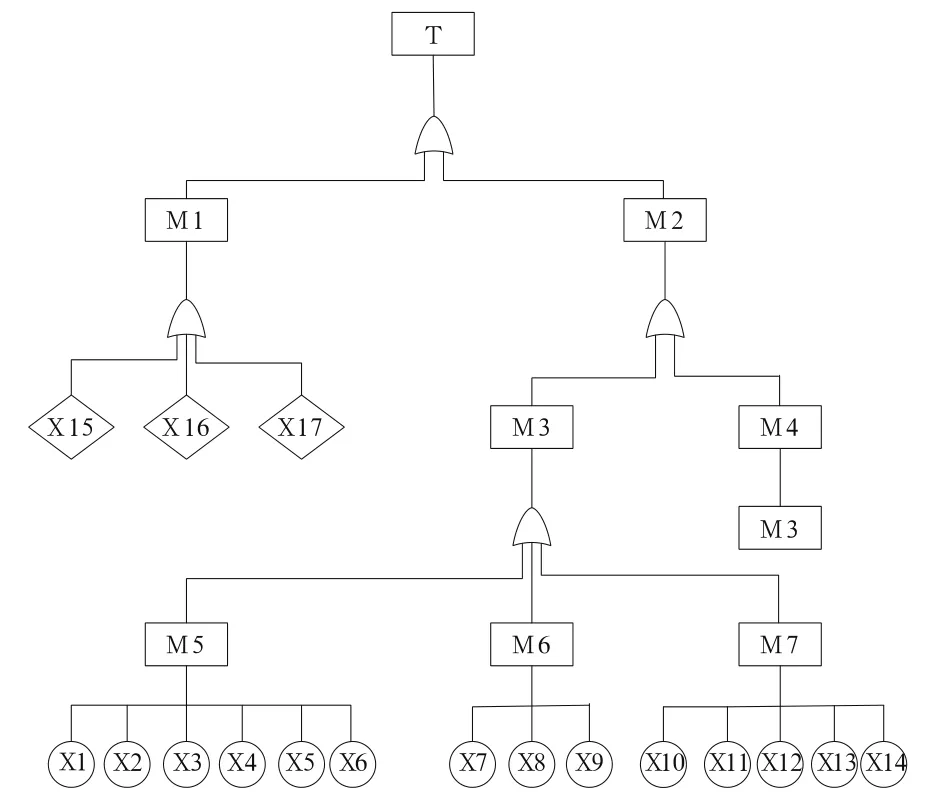
图5 摆缸停顿故障树
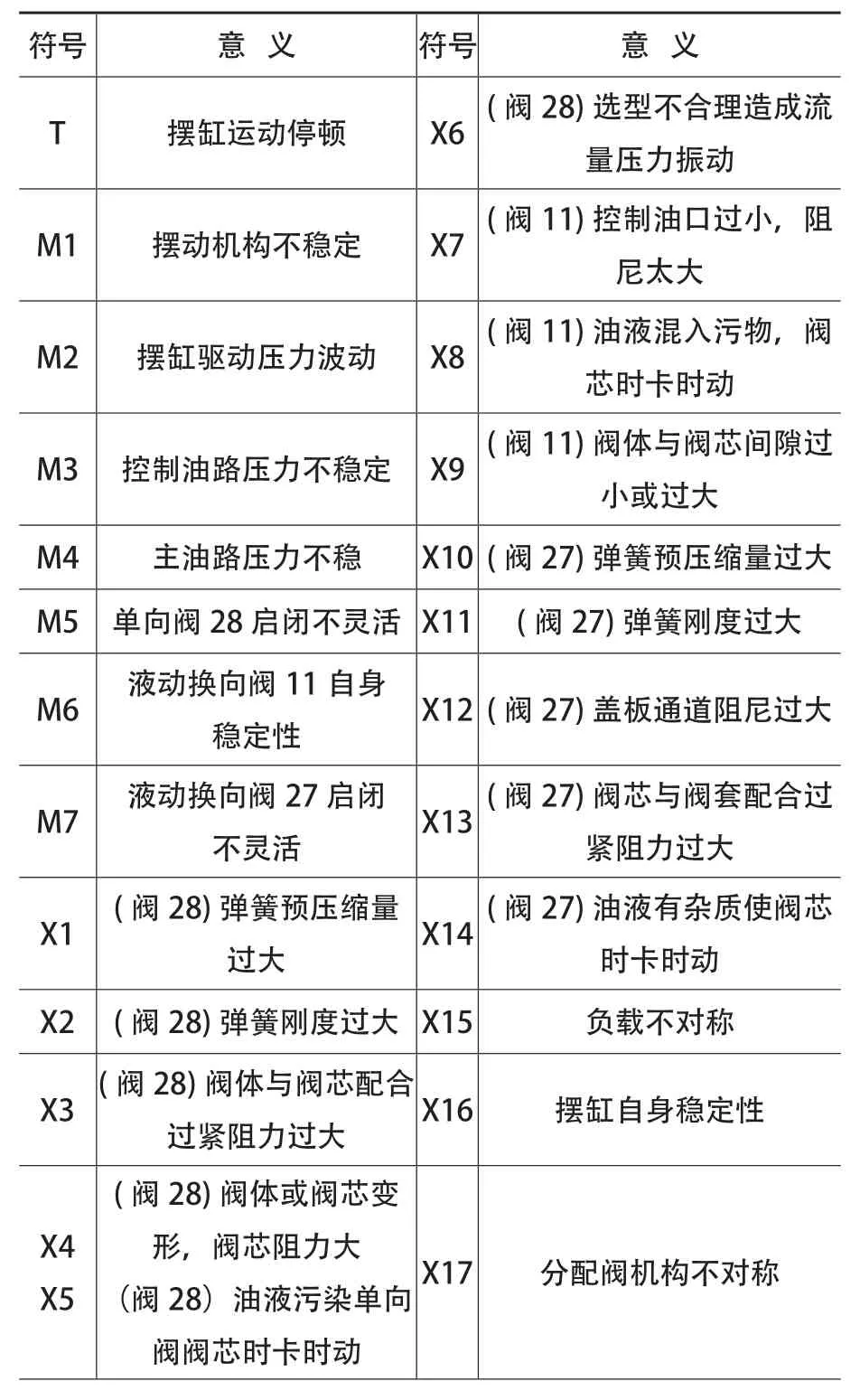
表1 故障树中各符号的意义
由故障树分析可知,任一底事件的产生均会导致摆缸运动停顿的故障。并且各底事件均只出现了1次,所以任一底事件都很重要,都应引起重视。
3.3 分析阶段(A)
分析各输入X对输出Y的影响,并确定要因Xs。在此,可以采用试验设计方法排除与故障无关的变量,进而最终找到故障的原因和部位,从而排除故障。
静态试验,用水代替混凝土,以此保证分配阀两边的负载一致。试验结果如表2所示。

表2 静态试验
通过上述试验,可以得到结论如下。
1)分配阀两边负载对称时,摆缸仍出现停顿现象,据此可以排除变量X15。
2)摆缸在系统流量较大时(对应于控制压力增大),摆缸运动较为平稳,无震荡现象,说明摆缸自身是稳定的,且摆缸运动状态与分配阀机构的对称与否无关,据此可以排除变量X16和X17。
3)当主油路压力一定时(22MPa),摆缸运动状态各不相同,由此可以排除变量X3、X4、X5、X8、X9、X13和X14。
通过静态试验,将引起故障的输入变量范围缩小至X=(X1,X2,X6,X7,X10,X11,X12)。
动态试验,在混凝土泵工作时,测量液控换向阀11的控制压力pc、pd和摆缸13.1及摆缸13.2的工作压力pa、pb,用于分析控制压力波动对主油路压力的影响及对摆缸停顿的影响。由于测试曲线呈周期性变化,所以截取其中具有代表性的一部分,如图6所示。
通过动态试验测试,可以得出结论如下。
1)液控换向阀11控制压力pc、pd过渡过程波动较大,且波动时间较长。说明换向阀11的运动比较迟缓,开启压力波动大。导致这个现象的原因可能来自换向阀11自身的作用(变量X7),或取信逻辑阀27过大阻尼的作用(变量X11或X12),抑或回油单向阀28过大背压的作用(变量X1)。过渡过程结束之后,在pc、pd压差的作用下,使液控换向阀11换向,换向时间短,说明开启过程的阻尼较小(即排除变量X10和X2),但开启过程压力有一定的振动,说明回油路造成了一定的振动(即变量X6有一定的影响)。由以上分析可知,可排除变量X2和X10,而变量X1、X11、X7和X12对系统影响较大。

图6 混凝土泵动态试验曲线
2)摆缸13的工作压力pa、pb在换向过程中波动较大,其压差Δp=pa-pb的大幅波动是造成摆缸停顿的直接原因。工作压力pa、pb的波动和控制压力pc、pd的波动具有相同的相位,且过度时间较长,说明了换向阀11的运动不稳定是造成摆缸13停顿的主要原因。
根据动态试验并结合静态试验,将引起故障的原因锁定在了单向阀28和液动换向阀11及逻辑阀27上,即输入变量Xs=(X1,X7,X11,X12)。
3.4 改进阶段(I)
选择改进方案:①减小单向阀28的弹簧预压缩量(即变量X1);②减小阀逻辑阀27的弹簧刚度及其盖板通道的阻尼(即变量X11、X12)。
验证改进效果:根据改进方案再次进行试验测试,如表3所示。调整后的工作参数完全满足混凝土泵的工作需要。

表3 改进后的静态试验
3.5 控制阶段(C)
1)更新相关设计文件,明确回油单向阀28、液控换向阀11和逻辑取信阀27的参数设置对摆缸的影响。
2)在摆缸的控制阀两端及主油路两端设置测压点,用于监控摆缸的运动平稳性及便于故障诊断。
4 结 语
六西格玛方法在HBT60混凝土泵液压系统故障诊断中的成功实施表明,六西格玛方法是一套开放的、逻辑关系缜密的方法体系,用于液压系统故障诊断,可以有效地提高故障诊断效率,为企业持续改进提升提供强有力的保证。
[1]陈宜通,刘信恩,耿楷真.HBT60混凝土泵液压系统工作原理及特点[J],液压与气动,2003,(8):25-26.
[2]黄文虎.设备故障诊断原理、技术及应用[M],北京:科学出版社,1996.
[3]谢宝义. 工程机械状态检测与故障诊断技术[J],计测技术,2002,35,(4):40-43.
[4]何 桢.六西格玛管理[M].北京:中国人民大学出版社,2014.
(编辑 于 洋)
TU64+.6;TH137.5
B
1001-1366(2015)08-0061-04
2015-05-15
