轮履复合式机器人的设计与实现*
2015-11-04田海波马宏伟张一澍尚万峰
田海波,马宏伟,张一澍,尚万峰
(西安科技大学机械工程学院,西安 710054)
轮履复合式机器人的设计与实现*
田海波,马宏伟,张一澍,尚万峰
(西安科技大学机械工程学院,西安 710054)
复合变结构的移动机器人具有更强的非结构化地形适应性。结合变胞机构理论,提出了一种轮履复合式机器人的结构。它可以按照环境要求变为轮式或履带式移动机器人,利用车轮实现高速远距离运动,而用履带来适应复杂地形,也可以轮履并用来跨越障碍。研究了机器人系统的总体结构,设计了其机械结构和控制系统,并制作完成了样机。试验表明,样机能够按照轮式和履带式模式运动,并顺利完成模式转换,具有较强的环境适应能力。
轮履复合式;移动机器人;非结构化环境
0 引言
移动机器人是机器人领域的发展热点,近年来发展迅猛。它能够进入恶劣的环境中,完成很多仅靠人无法完成的任务,在诸如灾后救援、航天及地下科考、核设施检测、侦察排爆等作业中,发挥着重要作用[1]。
这类机器人的特点是工作空间复杂,需要其移动机构具有很好的环境适应能力。结构合理的移动机构是确保机器人适应能力的关键。目前,这类机器人主要有轮式、腿式和履带式三种移动机构。这三种机构各有所长,也各有所短。轮式速度快,但地形适应能力差;腿式灵活机动,但速度慢且不易控制;履带式越障能力强,但能耗大且转向困难。
相比之下,具有复合移动机构的移动机器人更符合复杂地形的要求。典型代表有:美国喷射推进实验室的Rocky系列机器人[2];iRobot公司的机器人Pack-Bot[3];赫尔辛基大学的轮腿式机器人Hybtor[4];瑞士联邦学院的轮腿式机器人Shrimp[5];加拿大谢布鲁克大学的机器人AZIMUT[6];哈尔滨工业大学的复合运动模式四足机器人[7];北京理工大学的轮履腿式移动机器人[8];中科院沈阳自动化所的“灵蜥”反恐机器人等。
轮履式机器人是复合机器人的一种,它将轮式和履带式移动机器人的运动特点结合起来,增强其环境适应能力。具有代表性的有:①中科院沈阳自动化所的轮-履复合变形移动机器人[9]。该机器人的履带可以在电机驱动作用下实现轮式和履带式两种运动模式的转换。不过,机器人在轮式运动时,仍需履带动力的配合;②南京航空航天大学的轮履复合式机器人[10]。其车轮和履带始终同时着地,不能实现轮式和履带式两种运动模式的转换,无法把轮式的高速特性和履带式越障能力强的优点充分发挥出来;③江苏大学的轮履组合式环保机器人[11]。这种机器人可以实现轮、履两种运动模式的转换,不过在履带式运动模式中车轮毫无用处,造成资源浪费。
文中研究了当前复合式移动机器人的一些研究成果,结合变胞机构理论,提出了一种新型轮履复合式机器人的结构。它可以根据不同探测环境,适时地改变运动模式,用车轮保证高速远距离运动,而用履带来满足复杂地形的适应问题,也可以轮履并用一起越障。
1 轮履复合式机器人的结构与特点
轮履复合式机器人整体结构左右对称,包括两组履带,一套运动模式调整装置、四个车轮和一个车体。该机器人中总共有5个电机,一个电机(调姿电机)驱动运动模式调整装置使车轮上下移动,实现轮式和履带式运动模式的变换;两组履带分别由一个直流电机驱动;两个后轮上也各安装有一个直流电机。
该轮履复合式机器人可以适应多种复杂的外部环境,可以针对外部环境的变化用调整车轮位置的方式来改变自身构形,从而顺利通过。
(1)当机器人在宽广而平坦的环境中运动时,如图1所示,采用四轮运动模式,实现机器人快速灵活的运动。直线行走时,左右两侧车轮的转速相同。转向时,通过改变两侧车轮的转速,实现车体差速转向。这时机器人具有摩擦小、能耗低、运动灵活等优点。另外,在正前方有障碍物挡住履带的情况下,机器人也可以这种运动模式,抬高车体,增大车底净空,从而及时避开并顺利通过障碍。
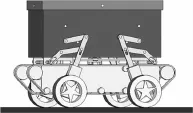
图1 机器人的四轮运动模式
(2)当机器人在松软路面,或楼梯、台阶等地面起伏较大的地形上运动时,如图2所示,该机器人的运动方式就可以采用履带式。这种模式增大了机器人与地面的接触面积,提高了机器人对不平坦地形和松软地形的适应能力。当机器人遇到单靠履带无法越过的障碍物时,车轮会产生驱动力,和履带一起克服障碍,此时,机器人采用差速转向。
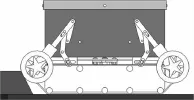
图2 履带运动模式
2 机器人系统的结构设计
2.1 整体结构
机器人结构设计中始终贯穿模块化设计思想。该思想的优点是各模块独立装配,互不干扰,有利于系统的设计和分析,同时互换性比较强。
根据各部分的功能和装配关系,整个机器人系统分为6个大模块:2组履带、1套运动模式调整装置、车体模块、电源模块和上位机模块、下位机模块。运动模式调整装置中包含1套车底调整驱动机构、4套连杆机构模块和2套驱动轮模块。该机器人的整体结构组成见图3。除拨杆、履带固定板分左、右件外,其余零部件均不分左右,完全相同,可以实现互换。车体模块中包括底盘和上盖,除上位机外,其余模块都装在底盘上。
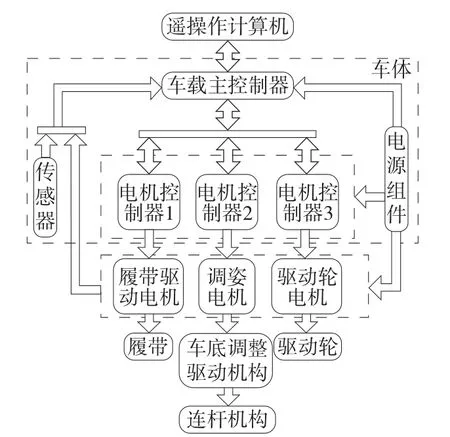
图3 机器人的整体结构组成
2.2 机器人的机械结构设计
2.2.1 运动模式调整装置的结构与工作原理
运动模式调整装置用于实现轮式和履带式运动模式的变换,是轮履复合式机器人的核心部件。
为达到轮式和履带式两种运动模式之间的快速变换,结合变胞机构原理,设计了一种结构简单、操作轻便、运动灵活的运动模式调整装置,如图4所示。该装置主要由如下部件组成:调姿(步进)电机、主动杆、推杆、横杆、履带固定板以及4套由连杆、拨杆、支撑杆和限位螺钉组成的变胞连杆机构组成。调姿电机的输出轴和主动杆之间用键固定连接。而主动杆和推杆、推杆和横杆、连杆和车体、连杆和支撑杆、拨杆和车体、拨杆和支撑杆之间均为铰接,可以转动。履带固定板和拨叉中都设有滑槽,横杆末端插入槽中,可以在其中滑动。
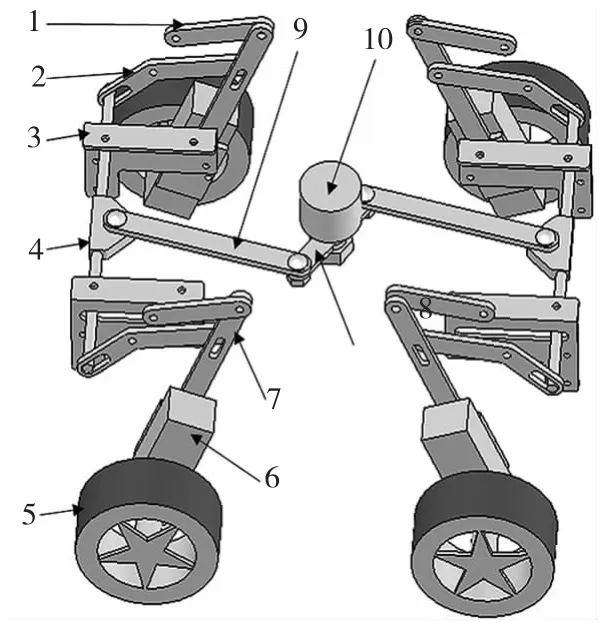
图4 运动模式调整装置的三维结构
该装置的工作原理如下(假设机器人的初始状态为轮式机器人,要将其转化为履带式机器人)。
在车体底部安装步进电机(即调姿电机),它根据控制系统的指令转动时,就带动安装在其输出轴上的主动杆转动。转动的主动杆带动前后两个推杆的平面运动,使横杆顺着履带固定板中的滑槽发生纵向移动。每个横杆都会带动车体左右两侧的拨杆转动。
拨杆、连杆、支撑杆和车体,在车体的侧面形成平面变胞四杆机构。拨杆的一端和横杆末端用滑槽连接,另一端和支撑杆的滑槽用销轴铰接,拨杆的中部与车体用销轴铰接;连杆则是一端和车体铰接,一端和支撑杆铰接。当拨杆在横杆的带动下转动时,四杆机构变形,连杆绕着车体上的铰接点转动,会带动支撑杆和车轮上移,此时,为该机构的第一种构形-平面四连杆机构。当连杆转动至设定角度时,受限位螺钉的限制,不能继续转动。但拨杆并未停止运动,在横杆的带动下还会继续转动,于是支撑杆在拨杆的作用下继续被迫转动,这就是该机构的第二种构型-曲柄滑块机构。这时车轮完成了由地面向某预定空间位置的运动,就实现了轮式运动模式向履带式的转换。
在该过程中,车轮中心的运动轨迹如图5所示(以左前轮为例)。其中,曲线AB是车轮中心在第一种构形时的运动轨迹,曲线BC是车轮中心在第二种构形时的运动轨迹,而曲线AC则是用于对比的车轮中心运动轨迹曲线(假定车轮绕车体上某点转动,而车轮的外缘所形成的包络曲线为该曲线的一个同心圆)。从图中可知,该运动调整装置,使车轮能在运动过程中巧妙地避开实际路况中的障碍,避免了不必要的后退,从而提高了机器人的越障能力,并减轻了车体的振动。当由履带式运动变为轮式运动时,与前述过程类似。这里不做详细说明。
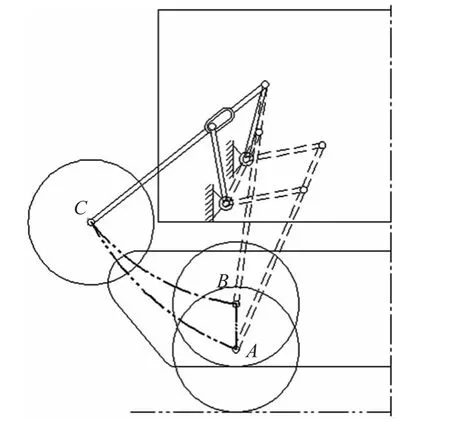
图5 运动模式调整时车轮的运动轨迹曲线与对比曲线
为便于加工,横杆设计为一个对称八面体钢块和两个螺纹圆杆连接的形式,中间的钢块由厚钢板切割得到。横杆先从条形槽中穿过,再从拨杆的条形槽中穿过,为保证运动中横杆不会发生左右串动,杆两端有螺纹,在安装位置确定后把杆的两端都拧上螺母。为了使该装置运动灵活,在各关节处设计有滚针轴承,以减小运动中的摩擦。另外,为确保各运动杆件之间的定位,避免运动杆件在运动中出现歪斜的情况,在连接轴外设计了塑料套管。
2.2.2 驱动轮模块
目前已有的电动轮尺寸不能满足使用要求,笔者自主设计了一种驱动轮结构。选择自带减速器的直流电机作为驱动,减速器输出轴通过平键带动车轮,而电机由螺栓固定在运动模式调整装置的支撑杆上。当支撑杆在变位电机的驱动下运动时,驱动轮也会一起运动,从而实现了车轮的变位。这种结构紧凑合理,节省了空间。另外,机器人设计速度不高,但要具有一定越障能力,所以采用了较大的减速比来提高车轮的驱动力矩,以满足越障要求。
2.2.3 履带模块
当履带式车辆的履带碰到垂直障碍物时,其前轮中心离地面的高度须大于障碍物高度时,车辆方能通过,履带的前进角在其越障过程中发挥重要作用。考虑到机器人在前进和后退时的动力学性能应基本一致,采用前后对称的梯型履带结构,见下图。

图6 履带模块结构三维图
该履带行走机构包括主动轮、从动轮、导向轮、履带、履带支撑板和驱动电机。主动轮布置在履带的后方,优点是可以缩短履带驱动区段的长度,有利于提高行走系统效率。它由带减速器的直流电机驱动,采用塑料轮,在轮子的圆周面上加工有均布的槽,主要用于引导履带沿正确的方向绕转,防止出现跑偏和越轨现象。从动轮的结构和主动轮近似,只是没有动力输入。为让履带经常保持一定的张紧度,专门设计了2组导向轮和5组负重轮,导向轮和负重轮全部用中间夹有垫圈的两个滚动轴承组合在一起构成,起引导和张紧履带以及减轻履带振动的作用。履带采用定制的橡胶齿形同步传动带,其优点是弹性好,不会出现打滑现象,效率较高。封闭式的履带通过主动轮、支承轮、托带轮和引导轮环绕在履带架上,其余部件都安装在履带支撑板上。履带支撑板的主要作用是承受铅垂方向的压力及履带产生的张紧力,为减轻自重,材料选为亚克力板。由于履带形体较小,而且履带为弹性好的橡胶材料,不设专门的弹性张紧装置。
2.2.4 车体模块
车体包括底盘和上盖。机器人的底盘不仅是控制、传感和能源等系统的运载装置,还是运动模式调整装置和履带的安装座。它的设计结构和加工过程直接影响到机器人移动子系统的传动精度和传动效率,从而影响运动部件的寿命。底盘采用箱式结构,用铝板整体冲压成型,然后焊接。整体成形后,再加工与其它子系统的装配接口。本机器人其余子系统的装配都以底盘为基准。这样,最大限度保证了移动子系统的定位精度。为避免电子器件受到外界灰尘和水露的侵袭,底盘上设有上盖,二者之间用螺钉连接。
2.3 机器人控制系统
2.3.1 控制系统硬件设计
控制系统采用分层结构,主要由作为上位机的高性能便携式PC机和作为下位机的车载控制系统组成,控制系统的总体结构如图7所示。
上位PC机主要功能是接收下位机传来的各种环境信息以及机器人本身的姿态信息,操作者根据获得的信息在计算机操作端发出指令,计算机从一系列控制指令共同组合而成的控制决策模块化数据库中,调用相应的控制任务,然后对任务进行分解并将结果通过串行通讯传给下位机。
车载控制系统采用基于串行总线的嵌入式分布系统方案,主要包括主控制器、3个电机分控制器、RS232网络和传感器数据采集模块。主控制器选取dsPIC系列中的dsPIC6014作为机器人的中央处理器,主要作用是接收上位机命令和底层各类传感器的信息、并及时给电机分控制器发出指令。电机分控制器接收主控制器的指令,按照指令控制电机的启停、转向和转速。3个电机分控制器分别控制两个履带电机、两个驱动轮和一个调姿电机,都采用集成电机驱动芯片L298N。RS232网络采用主/从多机通信的方式,在网络中以主控制器为主机,各分控制器为从机。主机通过广播的方式发出指令,从机解析主机指令后作出相应的回应。
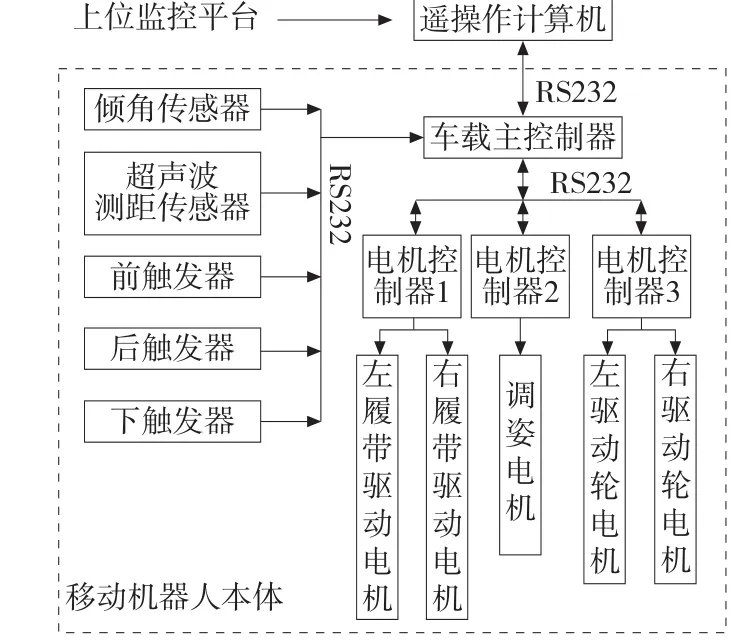
图7 机器人控制系统结构图
2.3.2 控制系统软件设计
控制系统软件是控制系统的核心内容,它负责完成信息融合、运动规划、任务决策和协调控制等任务。与硬件对应,它由总控平台软件和机载系统软件两大部分组成。
总控平台软件运行于上位PC机上,主要由行为规划模块、人机接口模块和串行通讯模块等组成,在基于WinXP的Labview软件环境下开发完成。控制策略包含在上位机的程序里,这样简化了控制器的硬软件调试。当上位机发出指令时,经过设定好的控制策略,对各个控制节点发送相应的指令信号,实现机器人的运动。
机载系统软件运行在车载控制平台上,主要完成对电机的伺服控制、向上位机反馈执行情况以及故障检测、报警与处理等功能。它由运动控制模块,传感器数据采集模块以及通信模块等部分组成。程序的主体用C语言编写,保证良好的维护性和清晰的结构;运算量大的部分用C源程序中嵌入汇编语句的方式实现,以加快程序运行的速度。程序中对电机的位置、速度、加速度进行检测并限制在一定的范围内,保证电机运行的安全。
3 物理样机与试验
为验证轮履复合式移动机器人的可行性,加工、装配了机器人的原理样机(图8为去掉上盖后的原理样机),并进行了轮式、履带式和模式转换的运动实验。实验证明该机器人能够分别完成轮式和履带式两种模式的运动,也能自如地完成两种运动模式的转换,达到了运动灵活性和较高越障能力的统一。

图8 轮腿式机器人样机
4 结论
总结并分析了现有轮-履复合式机器人的一些成果,提出了一种新型轮履复合式移动机器人的结构,研究了其机械系统和控制系统的结构,并完成了样机试制和部分试验。试验结果表明,该机器人能够成功按照轮式和履带式模式运动,并能顺利完成模式转换,具有较强的非结构化环境适应能力,可以为环境探测、灾难搜救等任务提供一个适应能力强的移动平台。
[1]刘金国,王越超,李斌,等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.
[2]Farritor S,Hacot H,Dubowsky S.Physics based planning for planetary exploration[C].Proceedings of the 1998 IEEE International Conference on Robotics and Automation,1998:278-283.
[3]Yamauchi Brian.PackBot:A Versatile Platform for Military Robotics[C].Proceedings of SPIE Conference 5422:Unmanned Ground Vehicle Technology VI,Orlando,FL,2004:228-237.
[4]Leppanen L,Salmi S,et al.WorkPartner,HUT Automation′s new hybrid walkingmachine[C].CLAWAR′98 First International Symposium,Brussels,Belgium,1998:1123-1128.
[5]Esher T,Cransaz Y,Merminod B,et al.An innovative Space Rover with Extended Climbing Abilities[C].Proceedings of space and Robotics,Albuquerque,USA,2000:781-786.
[6]Michaud F,Letourneau D,ArsenaultM,etal.Multi-Modal Locomotion Robotic Platform Using Leg-Track-Wheel Articulations[J].Autonomous Robots.2005,18:137-156.
[7]黄博,王鹏飞,孙立宁.复合运动模式四足机器人机构设计及分析[J].机械设计与研究,2006,22(5):49-53.
[8]段星光,黄强,李科杰.小型轮履腿复合式机器人设计及运动特性分析[J].机械工程学报,2005,41(8):108-114.
[9]李智卿,马书根,李斌,等.具有自适应能力轮-履复合变形移动机器人的开发[J].机械工程学报,2011,47(5):1-10.
[10]尚伟燕,李舜酩,鲍庆勇.新型探测车复合式移动系统结构设计及运动分析[J].机械科学与技术,2009,28(7):881-885.
[11]王鹏,朱龙英,崔振萍,等.轮履组合式环保机器人的设计与分析[J].机械科学与技术,2012,31(4):674-678,684.
(编辑 李秀敏)
Design and Implementation of W heel-tracked M obile Robot
TIAN Hai-bo,MA Hong-wei,ZHANG Yi-shu,SHANGWan-feng
(College of Mechanical Engineering,Xi′an University of Science and Technology,Xi′an 710054,China)
W ith compound and transformablemoving system,amobile robotmay havemore adaptability in field environments.A wheel-tracked robot has been developed through metamorphic mechanism theory.It can be transformed to a wheeled or tracked robot according to environmental requirements.It can move quickly by wheels,or traverse complex terrain by tracks,and overcome obstacles by wheels and tracks together.The robot’swhole structure of the robotic system was studied,and themechanism and control system were designed.The test result shows that the built prototype can run by wheels or tracks,and transform itself successfully.
wheel-tracked;mobile robot;unstructured environment
TH165;TG659
A
1001-2265(2015)07-0015-04 DOI:10.13462/j.cnki.mmtamt.2015.07.005
2014-10-21;
2014-11-26
国家自然科学基金项目(51305338);陕西省教育厅专项科学研究项目(2013JK1004);陕西省自然科学基础研究计划项目(2015JM5235)
田海波(1974-),男,山西长治人,西安科技大学讲师,博士,在站博士后,研究方向为机器人机构研究及其运动控制,(E-mail)ttttian_ 74@163.com。
