基于STM32的负载电流前馈PWM整流器设计*
2015-11-02黄金飞唐小琦程建军
黄金飞,唐小琦,宋 宝,程建军
(1.华中科技大学机械科学与工程学院,武汉 430074;2.广州深圳市浩能科技有限公司,广东深圳518172)
基于STM32的负载电流前馈PWM整流器设计*
黄金飞1,唐小琦1,宋 宝1,程建军2
(1.华中科技大学机械科学与工程学院,武汉 430074;2.广州深圳市浩能科技有限公司,广东深圳518172)
针对三相电压型PWM整流器在传统双闭环PI控制策略下,输出直流电压会随负载电流波动并且调整时间长这一问题,在分析系统扰动响应的基础上,提出了负载电流前馈控制方法。通过直接测量扰动电流,并将其作为电流环输入指令,以克服级联闭环调节带来的延迟,使得整流器输出电流紧紧跟随负载电流,进而提高输出电压的动态响应。为验证控制策略的可行性和有效性,利用STM32F103Z芯片的3个12位AD、高级定时器TIM1、集成USB模块等片上资源搭建了改进的整流装置,实验结果表明,基于STM32的负载电流前馈PWM整流器抗负载扰动能力得到了明显改善。
STM32;整流器;负载扰动
0 引言
在高性能供电系统中,通常将PWM整流器作为前端电源。与典型的不控整流方式相比,PWM整流器具有输出直流电压可控,网侧电流正弦化,功率因数可调,能量可以双向流动及谐波污染低等优点[1-2,6]。但是在电机负载和投切频繁的场合,整流器普遍存在因负载所需能量突变引起的母线电压波动大的问题[3-4]。
为了提高整流装置响应性能,减小输出电压波动。文献[4-5]提出在输出侧并联大容量电容,再配合泄放电路来稳定母线电压,该方法的优点是降低了整流器与负载间的藕合度,简化了整流器控制模型,但是增加了设备的体积和成本,也降低了系统响应速度和可靠性。文献[6]提出了一种瞬态无功电流指令不等于零的变结构策略,能明显提高母线电压响应性能,减小稳压电容容量,但是需要通过精确判断负载突变来切换控制模式。文献[7]在传统双闭环控制算法中增加电容电流前馈控制,前馈量通过电机负载模型估算求得,该方法将整流逆变装置整体作为研究对象,当负载类型繁多时就不再适用,有一定局限性。
本文在传统双闭环PI控制的基础上进行改进,将负载电流作为扰动量来直接观测,利用前馈进行补偿[8-9]。该控制算法代码简洁,计算所需时间少,适用于多种负载。以下重点从硬件和控制程序设计两方面,给出基于STM32的负载电流前馈PWM整流器实现方法。实验结果证明了该方法的有效性。
1 负载电流前馈PWM整流器控制原理
目前,电网电压定向矢量控制是比较成熟的一种PWM整流器控制策略,该策略采用电压环与电流环级联结构,经负反馈调节后得到稳定的直流母线电压udc。其中,电压环用于稳定电压udc,同时提供有功电流参考值,控制有功功率的大小与流向。电流环根据无功电流指令值,决定系统无功功率大小,为实现单位功率因数运行,将取为零,使得无功分量尽可能小。电压外环和电流内环均采用PI调节,以实现无静差跟踪。如图1所示,虚线以外部分为该策略控制框图。
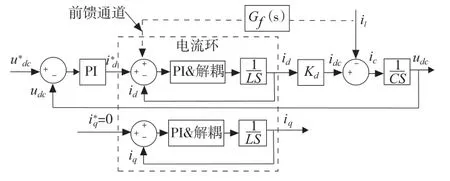
图1 PWM前馈整流器控制框图
可以看出,负载电流il是以扰动的形式作用于被控对象前端电容C上,只有当负载电流il使得输出电压udc产生偏差以后,PI控制器才能检测到并加以调整,因此控制系统无法完全消除扰动。
将PWM整流器视为线性系统,则扰动响应可以采用叠加原理来估算。令输出指令,分别以Gv(s)、Gc(s)与Go(s)表示电压环、电流环和电容被控对象的传递函数,Kd为变换增益,可以得到系统输出Udc(s)对扰动Il(s)的响应如下:

上述方式没有改变控制器结构,也不能完全克服扰动。另一种更为有效的策略是添加扰动前馈项。考虑到整流器的电流内环调整速度优于电压外环。为此,在电流内环Gc(s)指令输入处增加扰动il的前馈通道Gf(s)。图1中虚线所示即为该前馈路径,则母线电压扰动响应为:

式(2)中,只需要使得分子为零,就能消除扰动响应对输出电压的影响,则有:

忽略等效电阻的影响,根据同步旋转dq坐标系下的电网输入有功功率Pi和PWM整流器输出功率Po相等关系[10],可以得到:

结合控制框图1,可求得增益值为:


2 负载电流前馈PWM整流器硬件设计
基于前馈解藕思想,设计了一种带前馈控制的三相PWM整流器,装置主要由控制器和功率电路两部分组成,如图2所示。其中,控制器采用性价比更高的STM32F103Z替代DSP芯片,以实现模拟量采集、PWM输出、USB通讯等功能。功率电路由滤波电感、软启动继电器、IGBT整流桥、直流储能电容、负载及散热装置等组成。模块间采用层级结构安装使系统更紧凑。
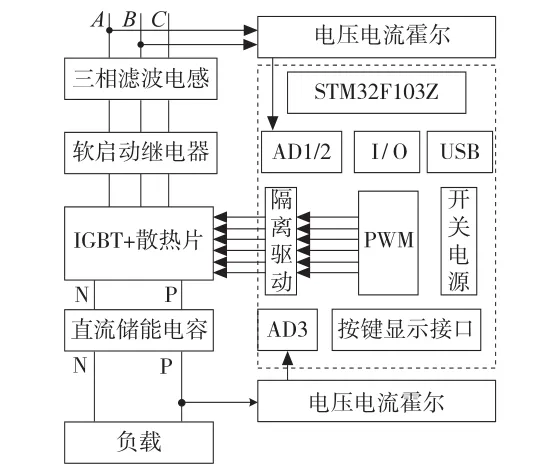
图2 PWM前馈整流器总体硬件结构图
前馈首先要求对扰动电流进行测量或估算。负载波动下的电流通常含有高频噪声,采用闭环电流霍尔直接测量,并加以滤波就能满足采样要求,其精度可达1%,带宽在几十kHz以上,响应速度小于1μs,同时也实现了功率电路与控制器的电气隔离。同样的方式可以用于电压测量。设计的整流装置中,电流电压首先由霍尔转换为0~5V电压信号,再经RC低通滤波后,由运放调理为满足STM32接口要求的0~3.3V模拟量。图3所示为负载电流采集的调理电路。
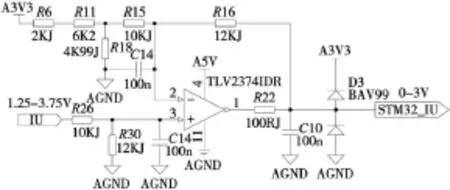
图3 负载电流调理电路
根据电流前馈PWM整流器控制原理,需要采集包括负载电流在内的至少6路模拟量,作为控制器输入。STM32F103Z提供3个12位ADC,可测量16路外部信号源,转换时间低至1μs,满足高频整流控制器模拟量采样实时性的要求。考虑到PWM整流器坐标变换中同步计算的要求,需要利用ADC1与ADC2的同步注入功能。其中,A相电压电流分配给ADC1的两个通道,B相电压电流分配给ADC2的两个通道。由TIM1定时中断触发单次转换,即可在同一时刻得到两相电压电流值。在完成前面两次同步转换后,母线电压与扰动电流由ADC3在独立模式下进行单次规则转换。图4所示为前馈策略的AD采集方式。
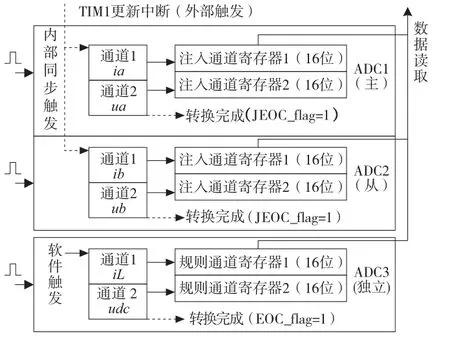
图4 前馈策略的AD采集方式
STM32集成有用于高频整流逆变的高级定时器TIM1,可以生成三组死区可编程的互补PWM波。定时器工作在连续增减计数模式时,一个周期内计数值变化轨迹即为三角载波,可以直接对控制器输出电压指令进行调制。每完成一次周期计数,定时器会产生一个更新事件,以它作为控制器的中断源,就能方便地触发AD采样、PWM输出等动作。
前馈PWM控制器进行PI调节时,需要结合内部的中间参数进行整定。为方便调试和节省测量成本,利用STM32集成的USB模块采集控制器中的变量值,并上传至PC以供观测[11]。USB采用定时周期通讯,采样频率即为主定时器频率,一般为5~20kHz,数据传输实时性得以保证。
3 基于前馈策略的程序实现
控制程序包括主程序和中断服务子程序两部分。主程序完成外设初始化,实时性不高的按键显示刷新,以及I/O动作等任务。前馈控制算法均在中断服务子程序中实现。中断程序中,电流环采用PI调节和SVPWM调制实现网侧电流正弦化控制;电压外环采用PI调节稳定直流母线电压。
相比于传统中断服务子程序,在电流环PI调节前,需要首先计算出扰动电流il,及前馈通道传函Gf(s),再与指令叠加作为电流内环给定值。
控制器在TIM1更新事件产生时,响应中断并按照图5中步骤执行服务程序。
(1)启动相电压、相电流、直流母线电压及负载电流的AD转换。对采样值进行预处理(包括滑动滤波、采样偏置消除及系数标定)。判断整流器工况,若母线电压低于不控整流值,需要封锁PWM脉冲,直到直流侧电容充电完成。
(2)执行clark-park坐标变换。计算电流环输出反馈值id、iq,相电压值ud、uq。
(3)执行锁相。根据ud、uq实时获取电网电压相位θ,以实现单位功率因数运行。
(5)计算负载前馈指令值,与 d轴电流指令叠加,抵消扰动电流影响。
(6)执行电流内环PI控制和解藕计算,并限幅,得到同步旋转坐标系下整流侧电压控制指令。
(7)产生SVPWM脉冲序列,之后由USB上传观测数据到上位机,完成当前中断处理。
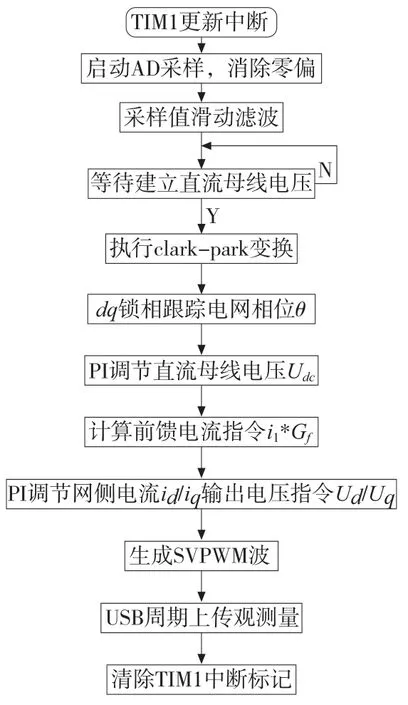
图5 PWM前馈整流器中断服务程序流程图
4 实验结果
根据提出的设计思路,针对传统不考虑扰动和扰动前馈这两种策略,设计了PWM整流在加减负载情况下的对比试验。在PWM整流器进入稳态运行后,通过继电器控制负载电阻的接入和断开,来实现负载突增和突减两种工况。实验数据通过STM32的USB接口发送到PC机显示。
实验的主要参数如下:网侧三相交流线电压有效值200V,交流滤波电感3.5mH,直流储能电容1410μF,IGBT开关频率10kHz,直流母线电压设定为500V。负载采用两个100Ω波纹电阻并联,初始负载100Ω,加载时为50Ω。
为对比两种控制策略效果,在传统策略下整定好PI参数,将同样的参数用于前馈策略。其中,电压环比例增益Kvp=0.8,电压环积分增益Kvi=30;电流环比例增益Kip=20,电流环积分增益Kii=5。
图6、图7分别表示采用两种策略控制时,直流母线电压和交流侧A相电流波形。图6中,V2表示采用传统策略时的直流母线电压。整流器接100Ω电阻负载稳定运行后,在0.01s时,由继电器将另一电阻并入直流输出侧。受此影响,母线电压会有15V电压跌落,经过0.04s调整后,母线电压回升到500V指令值。在0.06s时,又由继电器将其中一个负载断开,母线电压此时会有15V电压泵升,经过0.04s调整后,回落到指令值。图6中,V1表示采用前馈控制策略时的直流母线电压。同样工况下,母线电压只有约5V电压升降,为传统策略控制下的三分之一。而调整时间仅0.005s,缩短了约87%。
图7中,I1、I2分别表示改进策略和传统策略下A相电流波形,在0.01s负载增大时,电流幅值会由10A增加到20A,I1几乎在负载突变的同时就完成了幅值突变,I2则有一定滞后;在0.06s负载减小时同理。
可以看出,采用负载电流前馈控制方式后,PWM整流装置的母线电压波动明显小于传统策略。同时,网侧电流动态响应更迅速,保证了负载能量的稳定供应。实验表明,负载电流前馈PWM整流器,在硬件只增加一路模拟量采集的情况下,抗扰动性能明显优于传统控制方式。
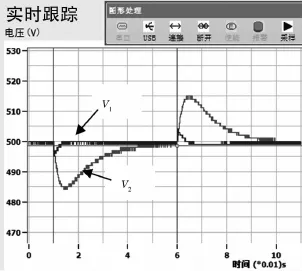
图6 负载变化时直流母线电压
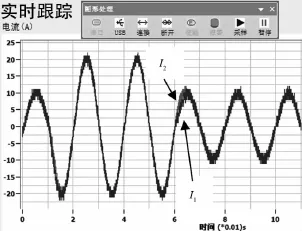
图7 负载变化时A相电流
5 结论
本文针对传统PWM整流器控制模型,分析了负载对于直流母线电压波动的影响并提出负载电流前馈补偿策略,据此设计了基于STM32的前馈补偿PWM整流器。实验结果表明,改进后的控制策略对于提高装置抗扰动能力有显著效果。
为了进一步提高PWM整流器抗负载扰动的能力,可以从提高测量元件带宽,精确估计环路模型等方面进行优化。另外,负载电流前馈策略有效抑制了母线电压波动,使得直流侧滤波电容上流过的电流接近零,这为实现PWM整流装置轻量化提供了可能。
[1]Yin Lu,ZHAO Zhengming,Lu Ting,et al.An Improved DC-Link Voltage Fast Control Scheme for a PWM Rectifier Inverter System[J].IEEE Transaction on Power Electronics,2014,50(1):462-473.
[2]张兴,张崇魏.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[3]陈荣,邓智泉,严仰光.永磁同步电机伺服系统中电机启动过程分析[J].西南交通大学学报,2004,39(2):203-208.
[4]赵士杰,辛舟,杜勇,等.再生制动在大功率相位摩擦焊中的应用[J].组合机床与自动化加工技术,2014(9):95-96,101.
[5]张岭,赵锦成,冀云冰,等.基于数控电容的PWM整流器直流侧电压改善研究[J].电源技术,2012,36(1):123-125,135.
[6]赵仁德,贺益康,刘其辉.提高PWM整流器抗负载扰动性能研究[J].电工技术报,2004,19(8):67-72.
[7]Gu B G,Nam K.A DC-link capacitorminimization method through direct capacitor current control[J].IEEE Transactions on Industry Application,2006,42(2):573-581.
[8]李兴春,李兴高.过程控制系统的前馈反馈复合控制器设计[J].组合机床与自动化加工技术,2012(6):64-66,70.
[9]甄文喜,戴跃洪,唐传胜.永磁同步直线电机伺服系统负载扰动建模与抑制[J].组合机床与自动化加工技术,2013(2):7-10.
[10]王恩德,黄声华.三相电压型PWM整流的新型双闭环控制策略[J].中国电机工程学报,2012,32(15):24-30.
[11]代攀,唐小琦,宋宝,等.伺服数据采集系统的USB接口设计[J].机械与电子,2013(12):8-10.
(编辑 赵蓉)
Design of Load Current Feed forward PWM Rectifier Based on STM 32
HUANG Jin-fei1,TANG Xiao-qi1,SONG Bao1,CHENG Jian-jun2
(1.School of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,China;2.Shenzhen Haoneng Technology Co.Ltd.,Shenzhen Guangdong 518172,China)
For three-phase voltage source PWM rectifier under the traditional double closed-loop PI control strategy,the output dc voltage fluctuates w ith load current and the adjustment lasts long.By analyzing the disturbance response of the system,a load current feedforward control strategy is put forward.The disturbance current ismeasured directly as the faster current loop input instruction.Thismethod overcomes the delay of the cascading closed-loop adjustment,so as to improve the dynam ic response performance.An improved rectifier device was designed based on STM 32F103Z.Three high speed ADs,an advanced timer TIM 1,an integrated USBmodule and other on chip resourceswere used.The experimental results show that the load current feed-forward PWM rectifier based on STM 32 has dramatically improved anti-load disturbance performance.
STM 32;rectifier;load disturbance
TH39;TG65
A
1001-2265(2015)08-0066-04 DOI:10.13462/j.cnki.mmtamt.2015.08.017
2014-11-05;
2014-12-11
“高档数控机床与基础制造装备”科技重大专项(2012ZX04001012);广东省部产学研重大专项(2012A090300012)
黄金飞(1990-),男,湖北应城人,华中科技大学硕士研究生,研究方向为数控技术与能量管理,(E-mail):15071423955@163.com;唐小琦(1957-),男,湖南邵东人,华中科技大学教授,博士研究生导师,研究方向为数控技术、交流伺服驱动和非线性运动控制。
