Influence of Non-smooth Surface on Tribological Properties of Glass Fiber-epoxy Resin Composite Sliding against Stainless Steel under Natural Seawater Lubrication
2015-11-01WUShaofengGAODianrongLIANGYingnaandCHENBo
WU Shaofeng, GAO Dianrong,*, LIANG Yingna, and CHEN Bo
1 School of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China2 Heibei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control, Yanshan University,Qinhuangdao 066004, China3 Liren College, Yanshan University, Qinhuangdao 066004, China
Influence of Non-smooth Surface on Tribological Properties of Glass Fiber-epoxy Resin Composite Sliding against Stainless Steel under Natural Seawater Lubrication
WU Shaofeng1,2, GAO Dianrong1,2,*, LIANG Yingna1,3, and CHEN Bo1,2
1 School of Mechanical Engineering, Yanshan University, Qinhuangdao 066004, China
2 Heibei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control, Yanshan University,Qinhuangdao 066004, China
3 Liren College, Yanshan University, Qinhuangdao 066004, China
With the development of bionics, the bionic non-smooth surfaces are introduced to the field of tribology. Although non-smooth surface has been studied widely, the studies of non-smooth surface under the natural seawater lubrication are still very fewer, especially experimental research. The influences of smooth and non-smooth surface on the frictional properties of the glass fiber-epoxy resin composite (GF/EPR) coupled with stainless steel 316L are investigated under natural seawater lubrication in this paper. The tested non-smooth surfaces include the surfaces with semi-spherical pits, the conical pits, the cone-cylinder combined pits, the cylindrical pits and through holes. The friction and wear tests are performed using a ring-on-disc test rig under 60 N load and 1000 r/min rotational speed. The tests results show that GF/EPR with bionic non-smooth surface has quite lower friction coefficient and better wear resistance than GF/EPR with smooth surface without pits. The average friction coefficient of GF/EPR with semi-spherical pits is 0.088,which shows the largest reduction is approximately 63.18% of GF/EPR with smooth surface. In addition, the wear debris on the worn surfaces of GF/EPR are observed by a confocal scanning laser microscope. It is shown that the primary wear mechanism is the abrasive wear. The research results provide some design parameters for non-smooth surface, and the experiment results can serve as a beneficial supplement to non-smooth surface study.
non-smooth surface, friction coefficient, wear resistance, glass fiber-epoxy resin composite, seawater lubrication,stainless steel 316L
1 Introduction*
A high pressure seawater axial piston pump using seawater as working medium is a key power component of the seawater reverse osmosis desalination system and the fluid power transmission systems. A cylinder/port plate pair is the key friction pair of the pump which is working under seawater lubricating conditions. Since the corrosion and wear have severely impacted on the normal operation and the service life of the seawater axial piston pump, the cylinder/port plate pair is very easy to be malfunction due to the special physicochemical properties of seawater, such as strong causticity and poor lubricating property.
Currently, many studies for reducing the friction and wear of the cylinder/port plate pair have been carried out in this field, and some achievements are obtained, in particular, on selecting the suitable materials for the friction pair. It is considered that the material for the friction pair under seawater lubrication mainly includes engineering plastics, engineering ceramics, surface engineering materials and special corrosion resistant alloys, which have been verified by engineering practices[1]. Therefore, a new method to solve this problem should be developed.
With the development of bionics, the non-smooth skin surface of some soil animals and plants, which have great wear-resistance property, provides the prototype for the research on the surface details of friction pair[2-4]. In fact, as early as 1966, HAMILTON, et al[5], investigated the lubricating performance of the surface with micro-asperities. Furthermore, they interpreted that the micro-asperities act as the micro-hydrodynamic bearings.
In recent years, many researchers have kept on the study of non-smooth surface. REN, et al[6-7], researched the bio-inspired anti-adhesion and drag reduction of bionic non-smooth surface. They tested and compared the smooth and non-smooth bulldozer blades. The result shows that the sample with non-smooth surface has a minimum amount of soil adhered to it after tests. ZHOU, et al[8], designed and tested several bionic moulds with varied non-smooth surface characteristics. They discovered that the non-smooth surface samples are more anti-adherent. GAO,et al[9], developed bionic non-smooth coring bit. Through field tests, they found that the anti-sticking property of the bit is excellent. In addition, ZHOU, et al[10-18], studied the effect of non-smooth surface on the microstructure,hardness and thermal fatigue behavior of H21 steel, H13 die steel, cast iron, medium carbon steel and 3Cr2W8V die steel.
ULRIKA, et al[19], investigated the potential of surface textures to improve the friction situation of the roller/piston contact in hydraulic motors, and found that the friction fluctuation is reduced. GEIGER, et al[20], researched that ceramic surfaces microstructured by excimer laser radiation can improve the tribological properties under hydrodynamic and elastohydrodynamic sliding conditions. RAMESH, et al[21], investigated the friction characteristics of microtextured surfaces by experiment and numerical simulation method. They found that the friction of textured surfaces is as much as 80% lower than that of the untextured surfaces. WANG, et al[22], designed a special surface texture pattern, which was combined with large and small dimples, to maximize the texture effect on the load carrying capacity of SiC surfaces sliding in water. Satisfactory results were obtained through comparison experiments eventually.
In order to research on the matrix wear resistance of bionic coupling bit, based on orthogonal tests, WANG[23]investigated 9 samples and revealed that the optimal combination of the non-smooth shape is non-smooth ratio 9%, pit diameter 1.5 mm, diamond concentration 125%. LUO, et al[24], studied the friction coefficient and wear resistance of groove non-smooth surface under different conditions. They found that the grooving spacing of 300 μm is a better choice for improving the friction coefficients and mitigating wear mass losses.
Bionic non-smooth surfaces, which are similar to the surfaces of animals and plants, have many advantages. It is considered that this technology can be introduced into the seawater axial piston pump to improve the problems in the cylinder/port plate pair. Studies mainly focused on natural seawater lubrication. In this paper, the influences of smooth and bionic non-smooth surfaces on the friction coefficient and wear resistance of GF/EPR coupled with stainless steel 316L are investigated under the determined condition.
2 Experimental Method and Materials
2.1 Materials and specimens
The upper specimen is made of commercially available stainless steel 316L, which had a hardness value of 230HB. The chemical compositions of stainless steel 316L are listed in Table 1.
The bottom specimen is made of GF/EPR, which was reinforced with glass fiber at a weight fraction of 80%. Table 2 shows the properties of GF/EPR. It has high dimensional stability and low moisture absorption[25].
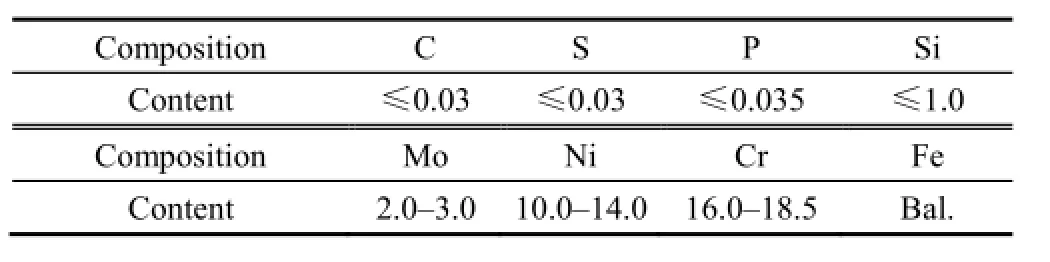
Table 1. Chemical compositions of 316L wt/%
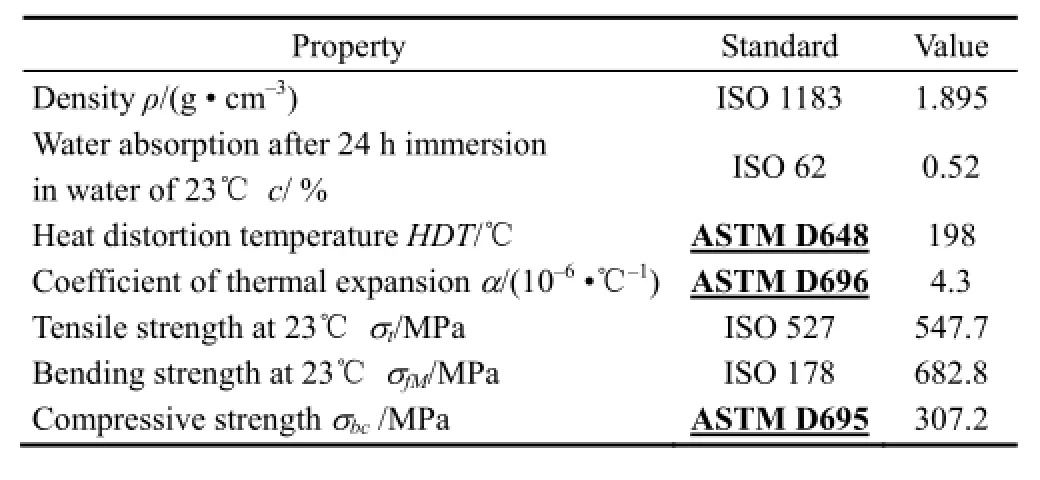
Table 2. Properties of GF/EPR
Fig. 1 shows the photograph and model for the friction pair and the profiles of bottom specimens.
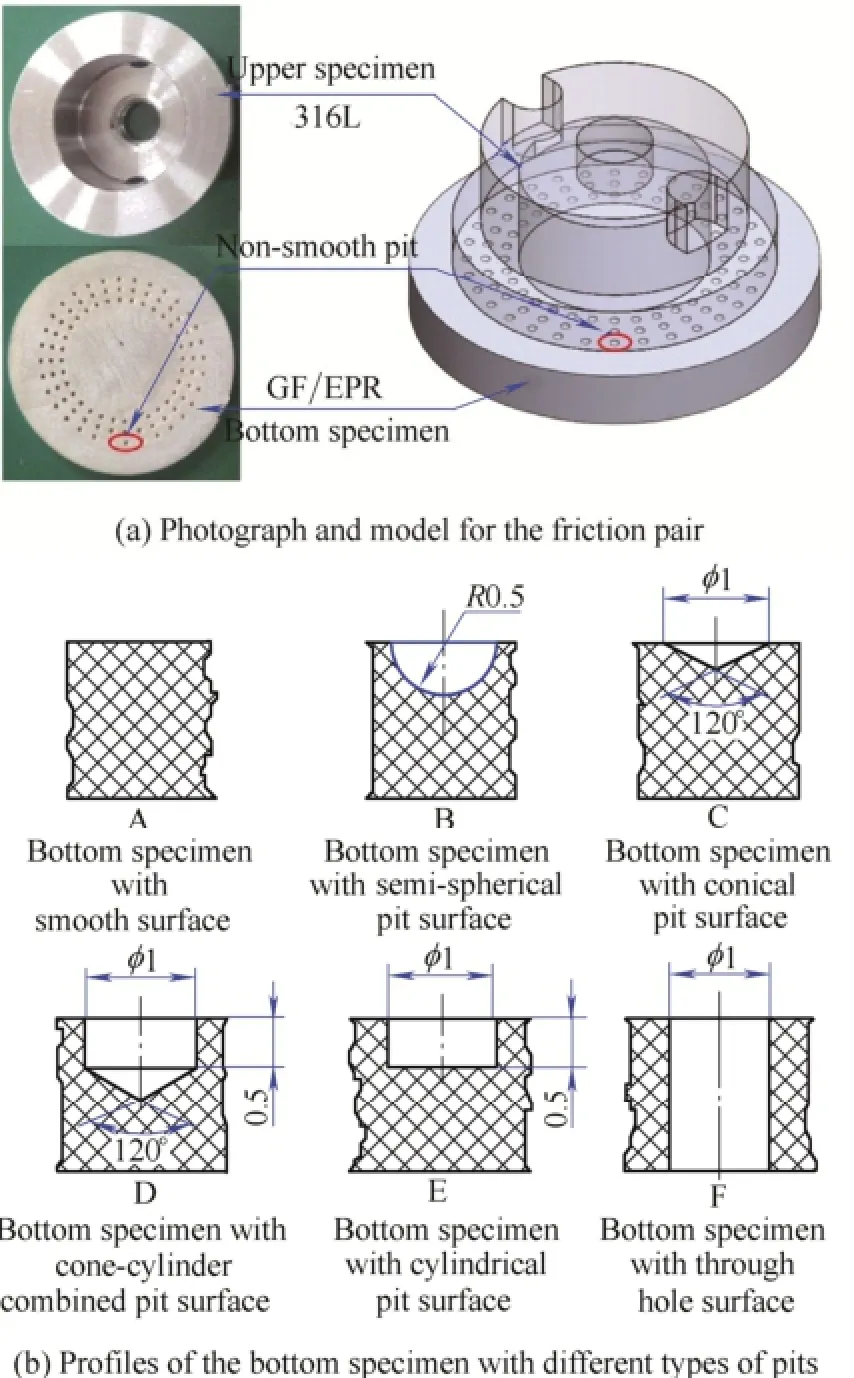
Fig. 1. Photograph and model for the friction pair and the profiles of bottom specimens
The upper specimen ring surfaces with dimension of Ф34 mm (outer diameter)×Ф20 mm (inner diameter) are smooth and have a mean roughness of about 22 μm Ra, see Fig. 1(a). Six types of the bottom specimen disc with dimension of Ф43 mm (outer diameter)×6 mm (height) aretested. The bottom specimen with the smooth surfaces, the semi-spherical pit surfaces, the conical pit surfaces, the cone-cylinder combined pit surfaces, the cylindrical pit surfaces and the through-hole surfaces is defined as the type A, B, C, D, E and F, respectively, see Fig. 1(b). The configurations of pits are shown in Fig. 1(b). On each bottom specimen with non-smooth surface, there are 32 pits which are equally distributed on the circles with diameters Ф23 mm, Ф27 mm, Ф31 mm, respectively.
2.2 Preparation of lubricating additive
Natural seawater used as lubricating additive in the friction and wear tests is obtained from the Bohai coastal water in Qinhuangdao. According to the GB 17378.4-2007 standard[26], the salinity and PH value of the seawater are measured as 2.98% and 7.1 respectively. Before using as lubricating additive, in order to removing obvious sand and other impurities, seawater is stood for 24 h firstly and then filtered with filter paper. No other physical and chemical processing is done for the seawater.
2.3 Experimental methods
The flow chart of the experiment procedures is displayed in Fig. 2. The friction and wear tests are conducted on a MMU-5G ring-on-disc test rig under natural seawater lubrication[27-28]. The specimens are washed in an ultrasonic ethanol bath for 40 min and then dried with natural air before and after each test. Mass loss is measured using an electronic balance with accuracy of 0.1 mg. What's worth mentioning is that the weight of the specimen is measured 5 times with the same standard to obtain reliable results. The morphologies of the specimens are observed by a confocal scanning laser microscope. Finally, the mass loss, the frictional coefficients and the images of the specimens are compared and analyzed.

Fig. 2. Summary of experiment procedures
The installation drawing of the friction pair is shown in Fig. 3. The upper specimen is installed on the rotating spindle. The bottom specimen and organic glass seawater cup are installed onto the lower column. Before each test, the organic glass seawater cup is filled with 100±5 mL seawater to immerse the upper and bottom specimens. No more seawater was injected into the organic glass seawater cup during the test. The tests are performed with a rotational speed of 1000 r/min, a normal lode of 60 N, and duration of 2 h. The tester connected to a computer, which is used to evaluate and record the friction coefficients of the friction pair on line.
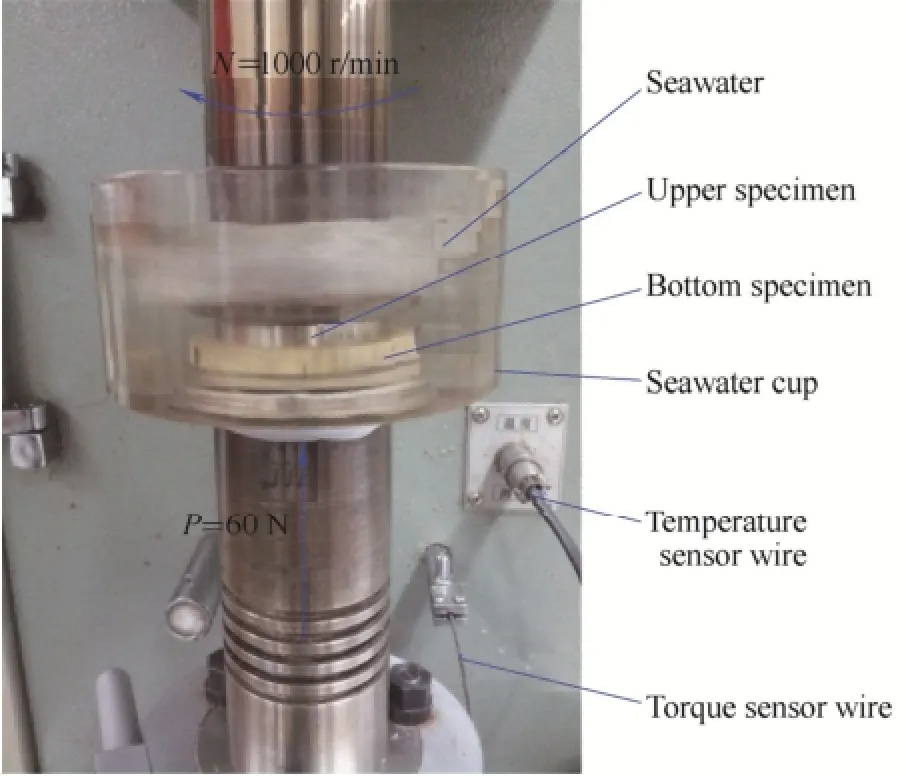
Fig. 3. Installation drawing of ring-on-disc configuration
3 Results and Discussion
3.1 Analysis of experiment results
The variation of the friction coefficients of different types of GF/EPR coupled with 316L with test time is shown in Fig. 4. All friction coefficients have the similar trends, see Fig. 4. The friction coefficients decrease rapidly in the initial 200 s, and then become stable until the end of tests. Therefore, it is recognized that all processes of friction and wear tests do not have a running-in period. The friction coefficient of type A specimen is obviously higher than that of any other types of specimen all the time. The friction coefficients of type B C, D, E and F specimen are similar to each other, but type B specimen shows the lowest friction coefficient after 800 s.
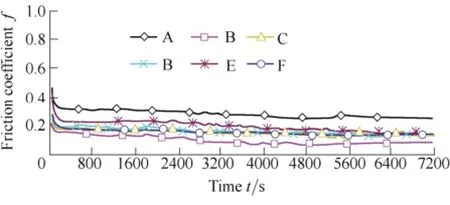
Fig. 4. Evolution of friction coefficient over time between different types of GF/EPR coupled with 316L
The average friction coefficients of different types of GF/EPR coupled with 316L are shown in Fig. 5. The average friction coefficient of type A specimen is 0.239,which is the largest average friction coefficient compared with that of other types of specimen. The average friction coefficients of type B, C, D, E and F specimen are 0.088,0.130, 0.135, 0.165, and 0.129, respectively, which show reductions of approximate 63.18%, 45.61%, 43.51%,30.96%, and 46.03% of type A specimen. That is, the average friction coefficients sort B<F<C<D<E<A. It is known that all types of bottom specimens with non-smooth surfaces show better friction properties than that of bottom specimen with smooth surface. The type B bottom specimen with semi-spherical pits surface has the lowest average friction coefficient (0.088), which has the best friction performance.
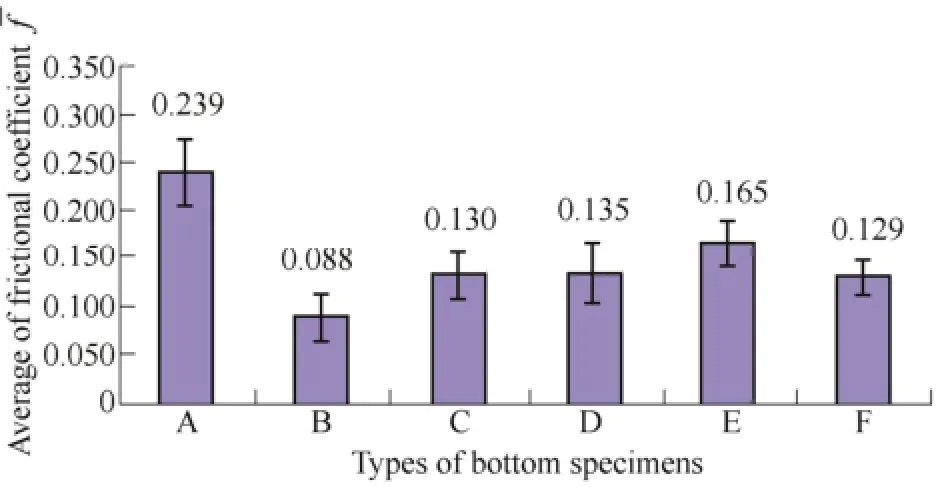
Fig. 5. Average friction coefficient of different types of GF/EPR coupled with 316L
Fig. 6 presents the mass loss (the mass before test minus the mass after test) of the upper specimens, bottom specimens and the friction pairs. It is known from Figs. 5 and 6 that a synergetic influent on the mass loss of upper specimen and friction pair with the average friction coefficients. As shown in Fig. 6, the mass loss of upper specimens and the friction pairs also sort B<F<C<D<E<A, which connected with the average friction coefficient, see Fig. 5. It is known that the mass loss increases with the increasing of the friction coefficient. By contrast, there is no similar rule between the average friction coefficients and the mass lose of bottom specimens. But it is obviously that the mass of bottom specimen is increased after friction and wear test.
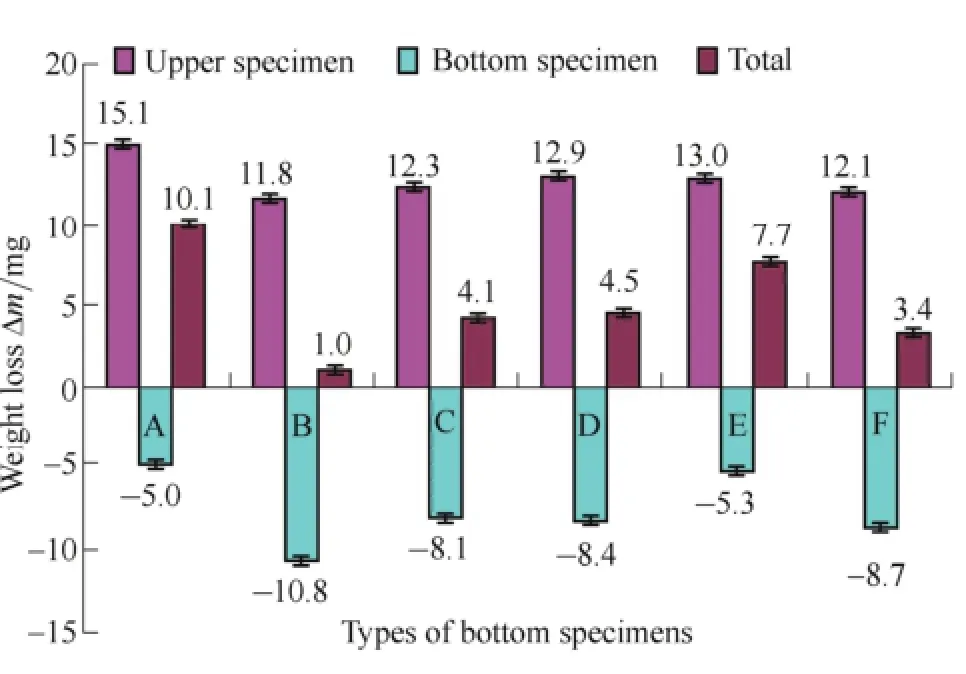
Fig. 6. Mass loss of specimens
3.2 Analysis of worn surfaces of upper/bottom specimens
In order to explain the friction mechanism of the tested friction pairs and the reason for the mass increasing of bottom specimen after tests, the wear scars and tracks on the specimen are investigated by a confocal scanning laser microscope. The morphologies of the worn surface are presented in Fig. 7.
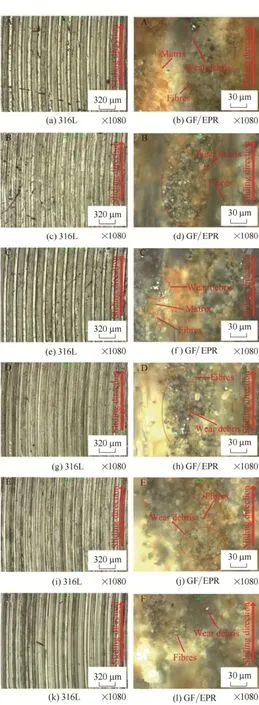
Fig. 7. Worn surface morphologies of upper specimen and bottom specimen after test
After careful observation of the worn surfaces of 316L specimens, there are obviously pan furrows on the friction surfaces. This phenomena indicates that the primary wear mechanism is abrasive wear.
On the worn surfaces of all GF/EPR specimens shown in Fig. 7, the wear debris of 316L, which appears as coil,block and filiform formation, are observed in the front of glass fibers and imbedded in the matrix of bottom specimens. Therefore, it is found that the 316L wear debris imbedded in the matrix result in the mass increase of GF/EPR specimens.
3.3 Analysis of wear mechanism
According to the experimental results presented above,the wear mechanism of GF/EPR with non-smooth surface(take the non-smooth surface with semi-spherical pits for example) coupled with 316L is shown in Fig. 8. The micro-hardness of glass fibers is harder than the hardness of 316L. As a result, when the upper specimen is sliding along the direction shown in Fig. 8, the tips of glass fibers penetrate into 316L under load, and then plough and peel the 316L, and the wear debris appears at the front of the glass fiber tips. There are two kinds of instances when the wear debris moves on the wear surface: one is that the debris shell off from the worn surface; another is that the wear debris penetrates into the matrix under the load.
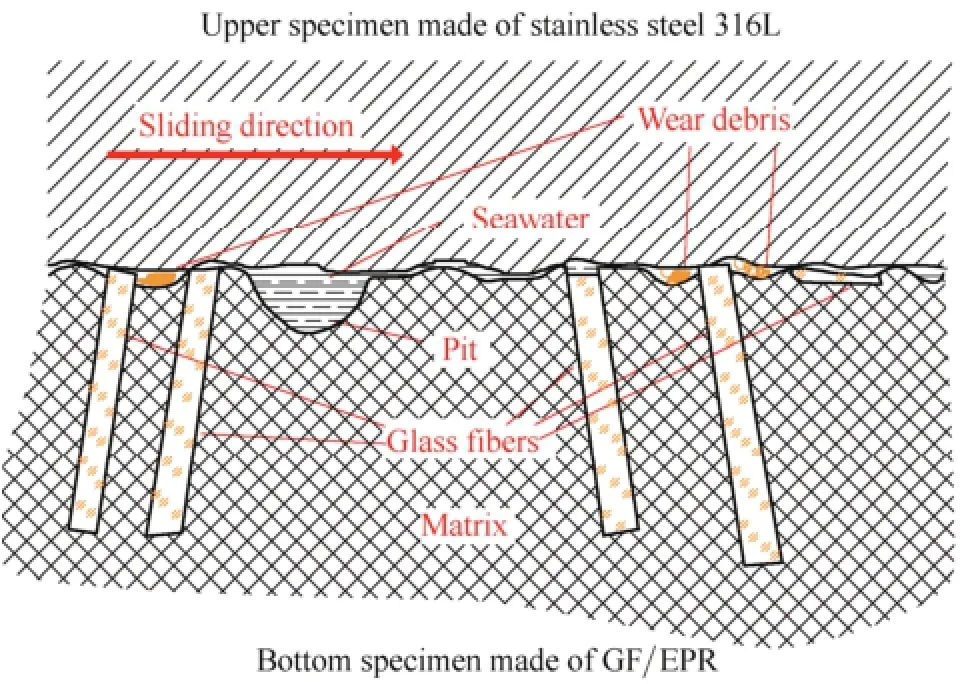
Fig. 8. Schematic diagram of wear mechanism of GF/EPR with non-smooth surface coupled with 316L
In addition, compared with smooth surface with no pits,non-smooth surfaces could store some seawater with the pits when there was surplus seawater in the friction surface. The seawater stored with the pits can be provided to the circumjacent region when the lubrication condition of the wear surface becomes worse. Hence, the friction coefficient of GF/EPR with non-smooth surface is lower than that of GF/EPR with smooth surface, and the wear resistance of GF/EPR with non-smooth surface is improved to be better than that of GF/EPR with smooth surface. Under mixing lubrication of oil dropping, CONG, et al[29-30], also found that the non-smooth surface can effectively improve the wear performance by the wear resistance test of aluminium alloy LY-12 specimens.
4 Conclusions
An experimental investigation on the tribological behavior of GF/EPR with six types of friction surfaces coupled with 316L under natural seawater lubrication is carried out. Based on the analysis of friction coefficients,wear mass loss, worn surface morphologies and wear mechanism, the conclusions are obtained as follows:
(1) The bionic non-smooth surface has a strong effect on the tribological properties of GF/EPR against 316L under natural seawater lubrication. The friction coefficients of bionic non-smooth surface specimen are lower than that of smooth surface specimen obviously. Remarkable, the friction coefficient of the specimen with semi-spherical pits surface shows the largest reduction (approximately 63.18%)of specimen with smooth surface.
(2) The wear mass loss of 316L coupled with the non-smooth surface GF/EPR is less than that of the 316L coupled with smooth surface GF/EPR. Specially, the mass loss of 316L coupled with semi-spherical pits surface GF/EPR is the least.
(3) The mass of the bottom specimen is increased after tests due to the wear debris of 316L penetrated into the matrix of the bottom specimens.
(4) Because of the existence of pits on non-smooth surface, seawater stored within the pits would be provided to circumjacent region to improve the lubrication condition. Thus, the specimen with bionic non-smooth surface presented better tribological behavior under natural seawater lubrication.
[1] HICKS D C. Development, testing and the economics of a composite/plastic seawater reverse osmosis pump[J]. Desalination,1989, 73: 95-109.
[2] ZHOU H, CHEN L, WANG W, et al. Abrasive particle wear behavior of 3Cr2W8V steel processed to bionic non-smooth surface by laser[J]. Materials Science & Engineering A, 2005, 412(1-2): 323-327.
[3] CHEN L, ZHOU H, ZHAO Y, et al. Abrasive particle wear behaviors of several die steels with non-smooth surfaces[J]. Journal of Materials Processing Technology, 2007, 190(1-3): 210-216.
[4] CHEN Li, REN Luquan, ZHAO Yu, et al. The wear-resistance of 3Cr2W8V steel with cave pit non-smooth surface processed by laser[J]. Journal of Bionic Engineering, 2008, 5: 34-39.
[5] HAMILTON D B, WALOWIT J A, ALLEN C M. A theory of lubrication by micro irregularities[J]. Journal of Basic Engineering,1966, 88(1): 177-185.
[6] REN Luquan, CONG Qian, TONG Jin, et al. Reducing adhesion of soil against loading shovel using bionic electro-osmosis method[J]. Journal of Terramechanics, 2001, 38(4): 211-219.
[7] REN Luquan, HAN Zhiwu, LI Jianjiao, et al. Effects of non-smooth characteristics on bionic bulldozer blades in resistance reduction against soil[J]. J. Terramechanics, 2003, 39(4): 221-230.
[8] ZHOU Hong, SHAN Hongyu, TONG Xin, et al. The adhesion of bionic non-smooth characteristics on sample surfaces against parts[J]. Materials Science & Engineering A, 2006, 417(1-2): 190-196.
[9] GAO Ke, SUN Youhong, GAO Runfeng, et al. Application andprospect of bionic non-smooth theory in drilling engineering[J]. Petroleum Exploration and Development, 2009, 36(4): 519-522,540.
[10] ZHOU Hong, TONG Xin, ZHANG Zhuihui, et al. The thermal fatigue resistance of cast iron with biomimetic non-smooth surface processed by laser with different parameters[J]. Materials Science Engineering A, 2006, 428(1-2): 141-147.
[11] ZHOU H, ZHANG Z H, REN L Q, et al. Thermal fatigue behavior of medium carbon steel with striated non-smooth surface[J]. Surface & Coatings Technology, 2006, 200(24): 6758-6764.
[12] ZHANG Zhihui, ZHOU Hong, REN Luquan, et al. Surface morphology of laser tracks used for forming the non-smooth biomimetic unit of 3Cr2W8V steel under different processing parameters[J]. Applied Surface Science, 2008, 254(8): 2548-2555.
[13] ZHANG Zhihui, ZHOU Hong, REN Luquan, et al. Effect of units in different sizes on thermal fatigue behavior of 3Cr2W8V die steel with biomimetic non-smooth surface[J]. International Journal of Fatigue, 2009, 31(3): 468-475.
[14] TONG Xin, ZHOU Hong, LIU Min, et al. Effect of striated laser tracks on thermal fatigue resistance of cast iron samples with biomimetic non-smooth surface[J]. Material & Design, 2011, 32(2): 796-802.
[15] TONG Xin, ZHOU Hong, REN Luquan, et al. Thermal fatigue characteristics of gray cast iron with non-smooth surface treated by laser alloying of Cr powder[J]. Surface & Coatings Technology,2008, 202(12): 2527-2534.
[16] MENG Chao, ZHOU Hong, CONG Dalong, et al. Effect of biomimetic non-smooth unit morphology on the thermal fatigue behavior of H13 hot-work tool steel[J]. Optics & Laser Technology,2012, 44(4): 850-859.
[17] MENG Chao, ZHOU Hong, ZHANG Haifeng, et al. The comparative study of thermal fatigue behavior of H13 die steel with biomimetic non-smooth surface processed by laser melting and laser cladding[J]. Material & Design, 2013, 51: 886-893.
[18] ZHANG Zhihui, LIN Pengyu, ZHOU Hong, et al. Microstructure,hardness, and thermal fatigue behavior of H12 steel processed by laser surface remelting[J]. Applied Surface Science, 2013, 276(1): 62-67.
[19] ULRIKA P, STAFFAN J. Textured surfaces for improved lubrication at high pressure and low sliding speed of roller/piston in hydraulic motors[J]. Tribology International, 2007, 40(2): 355-359.
[20] GEIGER M, ROTH S, BECKER W. Influence of laser-produced microstructures on the tribologicalbehaviour of ceramics[J]. Surface & Coatings Technology, 1988, 100-101: 17-22.
[21] RAMESH A, AKRAM W, MISHRA S, et al. Friction characteristics of microtextured surfaces under mixed and hydrodynamic lubrication[J]. Tribology International, 2013, 57: 170-176.
[22] WANG Xiaolei, ADACHI K, OTSUKA K, et al. Optimization of the surface texture for silicon carbide sliding in water[J]. Applied Surface Science, 2006, 253(3, 30): 1282-1286.
[23] WANG Chuanliu. Experimental study on matrix wear resistance of bionic coupling bits[J]. Procedia Engineering, 2014, 73: 98-102.
[24] LUO K Y, WANG C Y, LI Y M, et al. Effect of laser shock peening and groove spacing on the wear behavior of non-smooth surface fabricated by laser surface texturing[J]. Applied Surface Science,2014, 313(15): 600-606.
[25] PIHTILI H. An experimental investigation of wear of glass fibre-epoxy resin and glass fibre-polyester resin composite materials[J]. European Polymer Journal, 2009, 45(1): 149-154.
[26] General Administration of Quality Supervision, Inspection and Quarantine of the People' s Republic of China, Standardization Administration of the People' s Republic of China. GB 17378.4-2007. The specifications for marine monitoring-Part 4: Seawater analysis[S]. Beijing: Standards Press of China, 2008.
[27] WANG Zhiqiang, GAO Dianrong. Comparative investigation on the tribological behavior of reinforced plastic composite under natural seawater lubrication[J]. Materials & Design, 2013, 51: 983-988.
[28] WANG zhiqiang, GAO Dianrong. Friction and wear properties of stainless steel sliding against polyetheretherketone and carbon-fiber-reinforced polyetheretherketone under natural seawater lubrication[J]. Materials & Design, 2013, 53: 881-887.
[29] CONG Qian, JIN Jingfu, ZHANG Hongtao, et al. Experiment research on friction and wear of bionics non-smooth structure[J]. Lubrication Engineering, 2006, 175(3): 22-24. (in Chinese)
[30] CONG Qian, JIN Jingfu, ZHANG Hongtao, et al. Friction performance of bionic non-smooth surfaces with mixing lubrication[J]. Engineering and Technology Edition, 2006, 36(3): 343-366. (in Chinese)
Biographical notes
WU Shaofeng, born in 1987, is currently a PhD candidate at School of Mechanical Engineering, Yanshan University, China. His research interests include lubrication mechanism and friction and wear of the high pressure seawater axial piston pump.
E-mail: wushaofeng1926@126.com
GAO Dianrong, born in 1962, is currently a professor at School of Mechanical Engineering, Yanshan University, China. He received his bachelor PhD degree from Yanshan University, China, in 2001. His research interests include CFD, PIV and new types of fluid components and devices.
Tel: +86-335-8074782; E-mail: gaodr@ysu.edu.cn
LIANG Yingna, born in 1982, is currently a PhD candidate at School of Mechanical Engineering, Yanshan University, China. She received her bachelor degree in 2004, master degree in 2008 from Yanshan University, China. Her research interests include lubrication mechanism and friction and wear of the high pressure seawater axial piston pump.
E-mail: liangyingna@ysu.edu.cn
CHEN Bo, born in 1990, is currently a PhD candidate at School of Mechanical Engineering, Yanshan University, China. His research interests include lubrication mechanism and friction and wear of the high pressure seawater axial piston pump.
E-mail: flygo230@163.com
10.3901/CJME.2015.0928.117, available online at www.springerlink.com; www.cjmenet.com; www.cjme.com.cn
* Corresponding author. E-mail: gaodr@ysu.edu.cn
Supported by National Natural Science Foundation of China (Grant No. 51375421), Hebei Provincial Key Project of Science and Technology Research of (ZD20131027)
© Chinese Mechanical Engineering Society and Springer-Verlag Berlin Heidelberg 2015
March 27, 2015; revised September 21, 2015; accepted September 28, 2015
杂志排行
Chinese Journal of Mechanical Engineering的其它文章
- Influence of Alignment Errors on Contact Pressure during Straight Bevel Gear Meshing Process
- Shared and Service-oriented CNC Machining System for Intelligent Manufacturing Process
- Material Removal Model Considering Influence of Curvature Radius in Bonnet Polishing Convex Surface
- Additive Manufacturing of Ceramic Structures by Laser Engineered Net Shaping
- Kinematics Analysis and Optimization of the Fast Shearing-extrusion Joining Mechanism for Solid-state Metal
- Springback Prediction and Optimization of Variable Stretch Force Trajectory in Three-dimensional Stretch Bending Process