Workbench实现工业机器人瞬态动力学分析应用研究*
2015-10-31黄文权李开世
李 辉,黄文权,李开世
(四川理工学院 机械工程学院,四川 自贡 643000)
Workbench实现工业机器人瞬态动力学分析应用研究*
李辉,黄文权,李开世
(四川理工学院 机械工程学院,四川 自贡643000)
以六自由度工业机器人为研究对象,实现工业机器人在复杂运动条件下的动态有限元分析为目标。将SolidWorks中建立的三维模型和在ADAMS中进行运动分析的结果同时导入Workbench中,快速实现了在Workbench中使工业机器人各关节按照预定规划进行瞬态动力学分析。这种快速实现复杂运动的有限元分析方法与传统通过计算进行有限元仿真分析相比,该方法不需要计算并且充分的考虑了机械结构和惯性力等因素,这使仿真方法更加简便,结果更加可靠,同时分析的环境更加接近真实的工作要求。
快速有限元;工业机器人;瞬态动力学
0 引言
有限元分析技术是机械产品开发中的重要环节,是对机械产品进行优化、安全评估和受力分析等一系列设计的重要手段。瞬态动力学分析是动力学分析的重要组成部分,同模态分析、谐响应分析相比,综合考虑了结构和惯性力等因素,使分析结果更接近于系统的真实情况,对设计和校核更具有指导意义[1]。
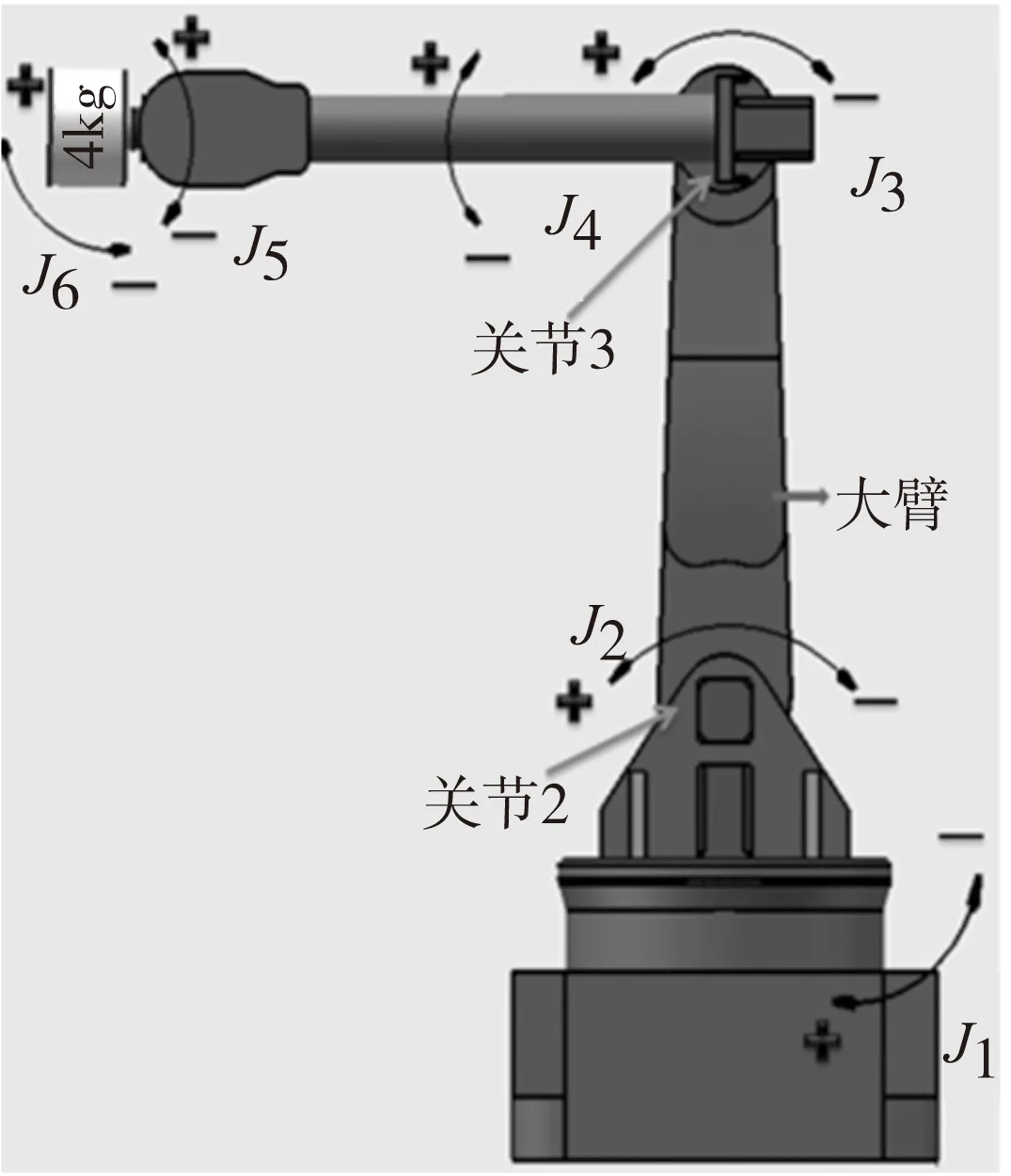
图1 六自由度机器人模型
工业机器人作为一种典型的机电一体化设备,近年来在社会生产中起到越来越重要的作用[2]。六自由度机器人具有结构简便、运动灵活等优势,在工业机器人领域得到了广泛的应用[3]。文中以六自由度机器人为研究对象,在ADAMS中对工业机器人的第二、第三关节进行了运动学规划,并将规划的结果运用在了Workbench瞬态动力学仿真上,成功地实现了六自由度机器人在复杂运动条件下的有限元仿真。
1 模型的确立
Workbench的建模功能虽然比较强大,但是在建立复杂的三维模型方面还是比较困难,因此选用SolidWorks进行三维建模[4]。为减少Workbench中的运算的结点数,将末端机械手改为负荷设为4kg的标准砝码,得到的模型如图1所示。
2 传统计算有限元分析
2.1受力分析
在六自由度机器人运动过程中,当机械臂处于水平状态时,是机械臂受力的极限情况,此时机械臂受力最大、变形最大[5-8]。通过SolidWorks的质量属性功能和测量功能得到其在极限位置状态的受力和尺寸如图2所示。设计中用到的材料如表1所示。
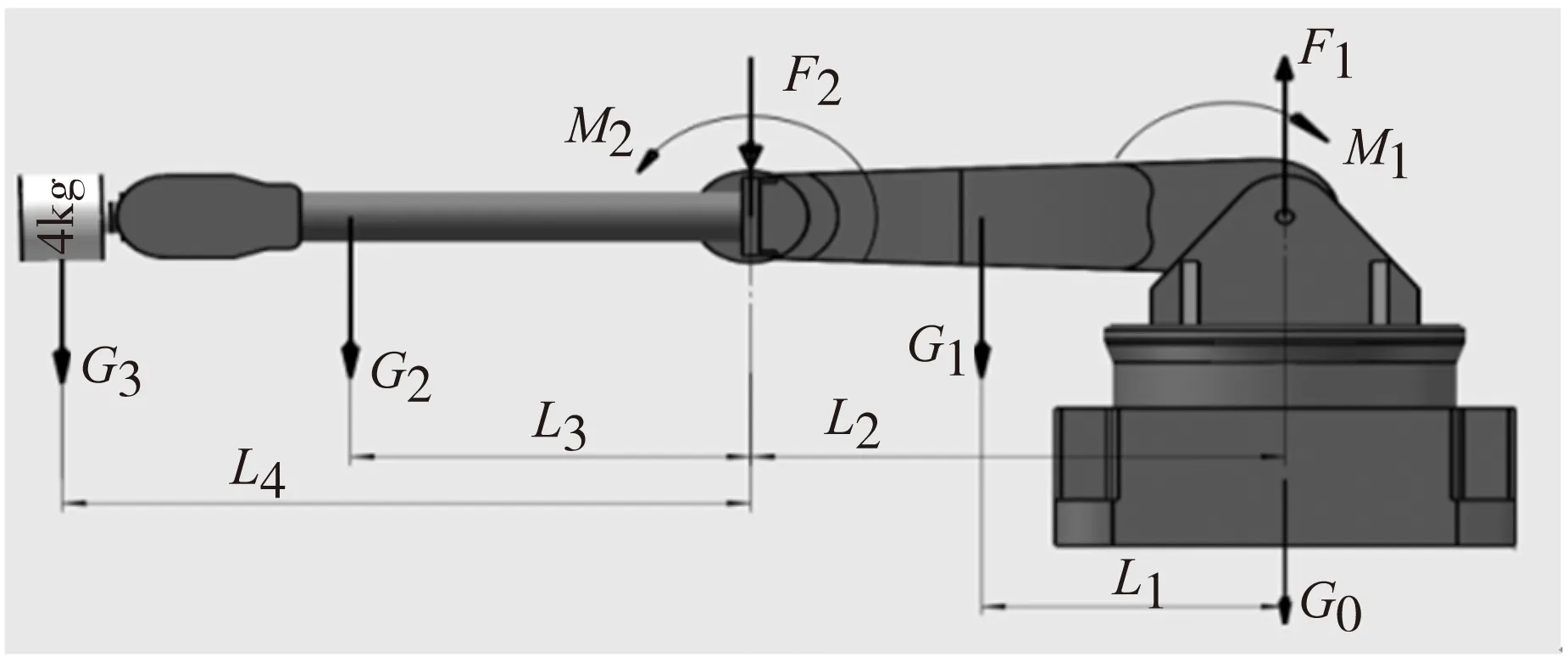
图2 最危险状态

材料密度(kg/m3)弹性模量(Pa)泊松比屈服强度(Pa)45#钢78002.1E110.33.25E8铝合金27807.2E100.322.8E8
在材料选取上,除机座采用45#钢外,其它都采用铝合金。其中,图2中G1、G2、G3分别为大臂、小臂和末端砝码的重量97.4187644N、63.1348908N、39.2264N,L1=528.16mm,L2=930mm,L3=696.76mm,L4=1198.91mm。
2.2大臂受力计算
大臂在整个机器人系统中受力相对复杂,因此设计中选取大臂为研究对象,根据受力情况列出计算公式为:
F2=G3+G2F1=F2+G1
M2=G3×L4+G2×L3
M1=M2+F2×L2+G1×L1
通过计算可知:
F2=102.3612908N
F1=199.7800552N
M2=39.2×1.19891+63.0924×0.69676 =
91.018789737808N·m
M1=91.02+102.4×0.93+97.42×0.52816=
237.668N·m
2.3大臂有限元分析
根据大臂的受力分析及其载荷计算结果,在Workbench中对大臂相应位置施加约束和集中力载荷,经过计算可以得到其应力、应变等结果,其中大臂受到的应力分布如图3所示。
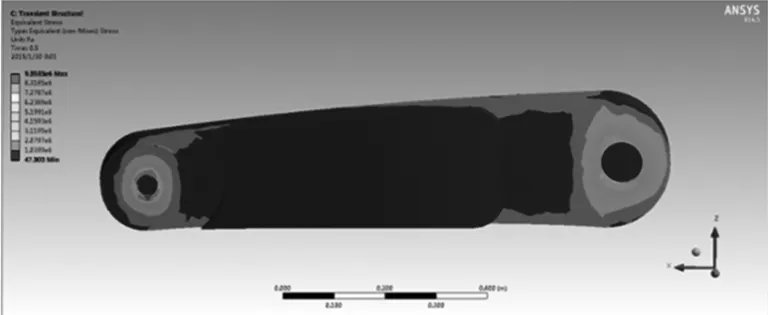
图3 大臂应力分布
通过分析受力结果可得到整体的应力分布情况和最大应力值(9.3583e6Pa)。该分析结果将与后续快速有限元分析进行对比,以确定该方法的正确性。
3 快速有限元分析
为实现装配体在不需要通过计算、受力加载和约束定义,便能得到真实运动条件下的受力分析。研究中只需通过在ADAMS中运用STEP函数进行运动规划,同时将得到的数据直接导入Workbench中相对应的各关节,并对装配体施加外力和重力,便能进行有限元分析。这种方法不需要计算,并考虑惯性力和各零件间的连接关系,使瞬态动力学分析更简便、快速和准确。
3.1ADAMS 运动学仿真
运用ADAMS进行运动学分析是实现快速有限元分析的基础。在ADAMS中的运动分析规划将使工业机器人从图1的起始位置,运动通过图2的最危险位置。在ADAMS中对第二关节和第三关节进行运动规划后将得到两关节的角度转动值,将这些值导入Workbench中,使其在瞬态动力学分析中对第二关节和第三关节进行驱动。
运用STEP函数分别对第二关节和第三关节的旋转副定义运动方式。
第二关节:
step(time,0,0,1,0)+step(time,1,0,2,pi/45)
第三关节:
step(time,0,0,1,pi/45)+step(time,22.5,0,23.5,-pi/45)
根据上述设定得到工业机器人末端在ADAMS中运行的速度如图4所示。
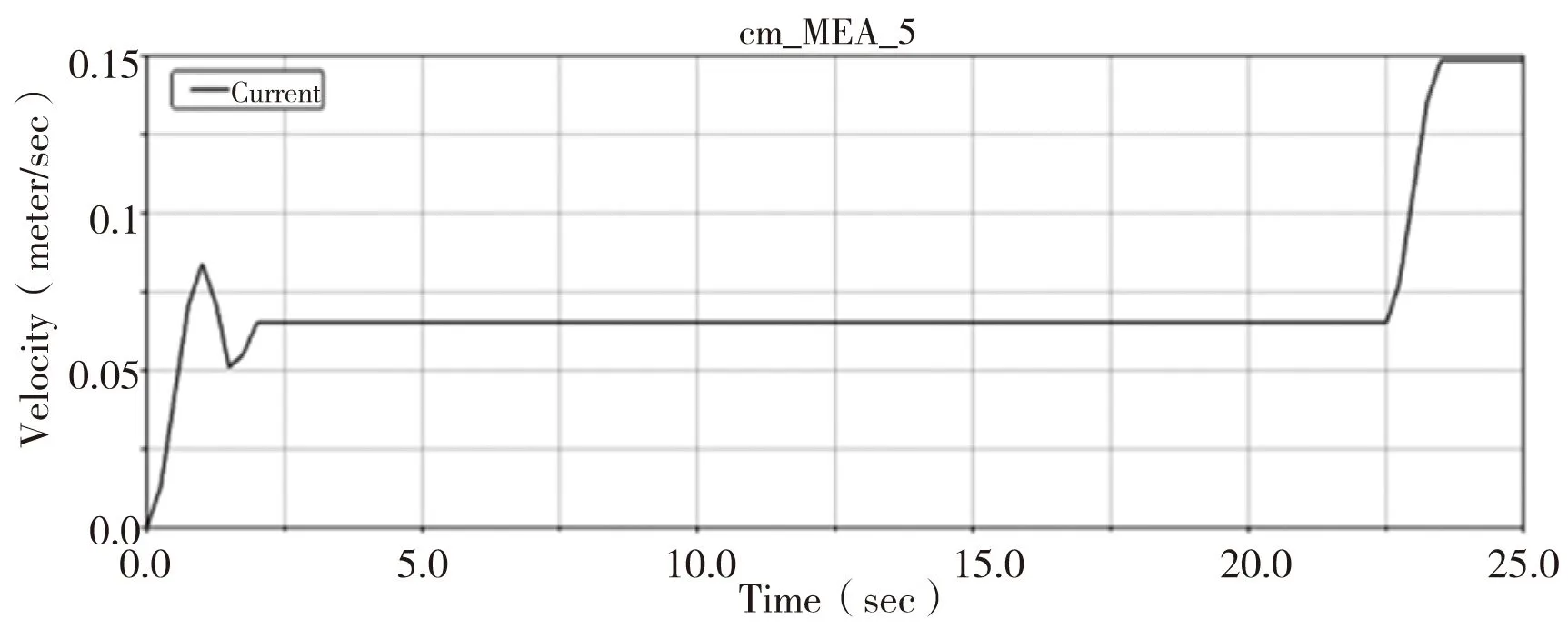
图4 机械臂末端速度
3.2.xlm格式数据导出
ADAMS中导出的数据格式一般为excel格式或者是文本文档,但是目前Workbench仅识别.xlm格式文件,这就需要对得到数据进行转换。
(1)ADAMS文本文档保存
在ADAMS中选定关节【Motion】→右击→【measure】→【MOTION-1】→【Ax/Ay/Az Projected Rotation】→【apply】在得到的图上右击→【Plot:scht1】→【Transfer To Full Plot】→在弹出来的窗口中选择→【File】→【Export】→【Spread sheet】→将数据存为文本文档。
(2).xlm数据格式转换
将生成的文本文档数据保存到已生成的.xlm文件中,将完成数据的转换,其结果如图5所示。
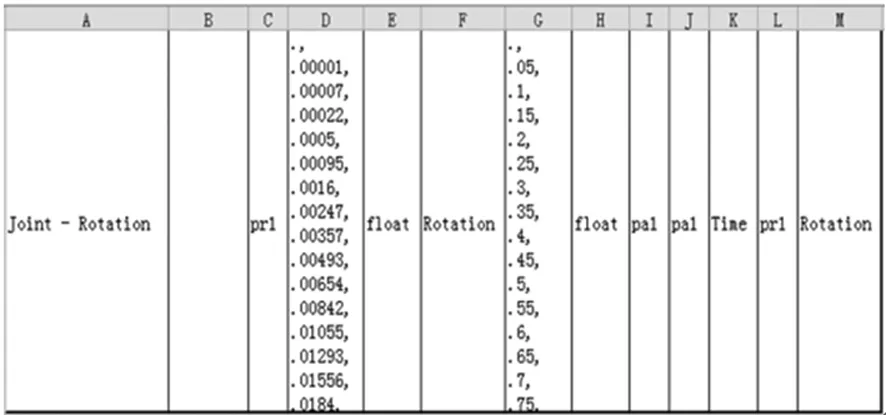
图5 .xlm格式文件
3.3Workbench导入ADAMS数据
以第二关节为例,将生成的.xlm文件导入Workbench中,其导入方式如图6所示。
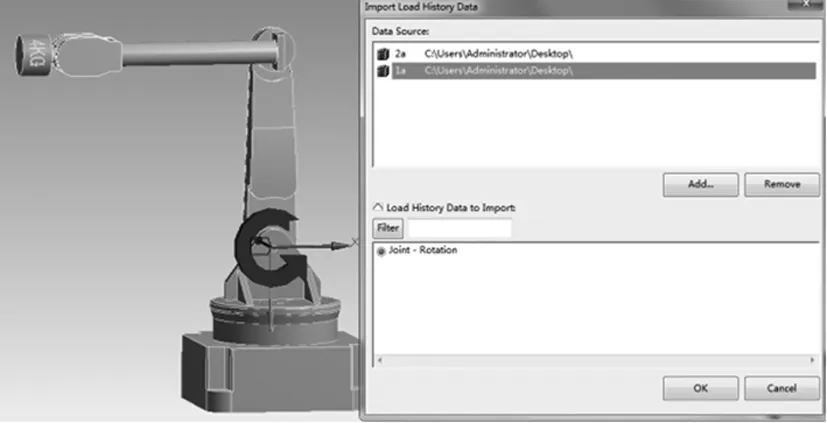
图6 数据导入Workbench
3.4Workbench瞬态动力学分析
(1)为了验证ADAMS中的数据是否成功导入了Workbench中[9-10],将通过将ADMAS中工业机器人末端测量的速度(图4所示)与Workbench中末端测量的速度(图7所示)相比较,从而进行验证。
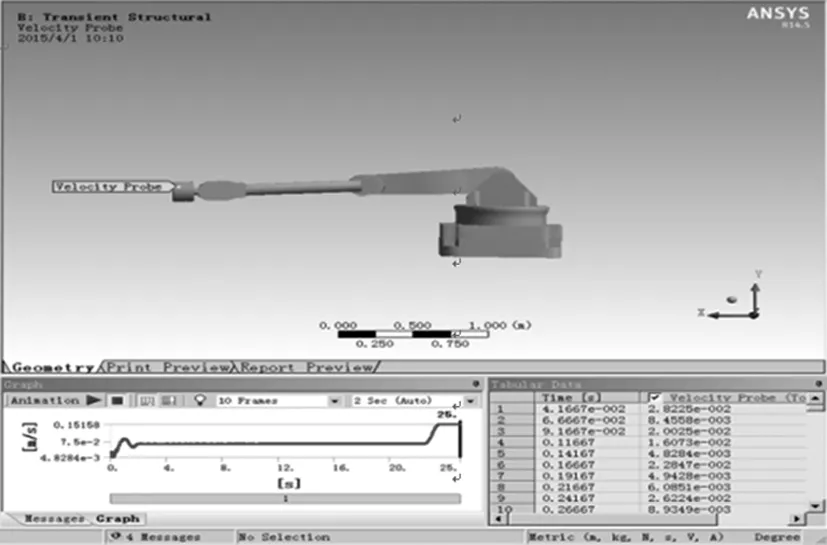
图7 机械臂末端速度
通过图4与图7的结果比较可知,工业机器人在Workbench和在ADAMS中末端速度一致,证明了ADAMS中仿真的数据成功地导入了Workbench中,实现了二者的联合仿真成功。
(2)为了验证这种方法的可靠性,以工业机器人的大臂为参考,将得到的大臂应力分布(图8所示)与通过计算,再进行仿真的结果(图3所示)相比较来确定这种方法分析结果的可靠性。
图8所示应力最大值为9.2089e6Pa,整个受力最大值及受力的分布与图3所示基本一致。虽然两次仿真结果存在一定的差异这主要与两次求解所用的求解器、网格划分、固定方式和力的加载不同有关。同时,这种实现复杂运动体的有限元仿真分析方法还考虑了结构体间的相互影响和惯性力等因素。
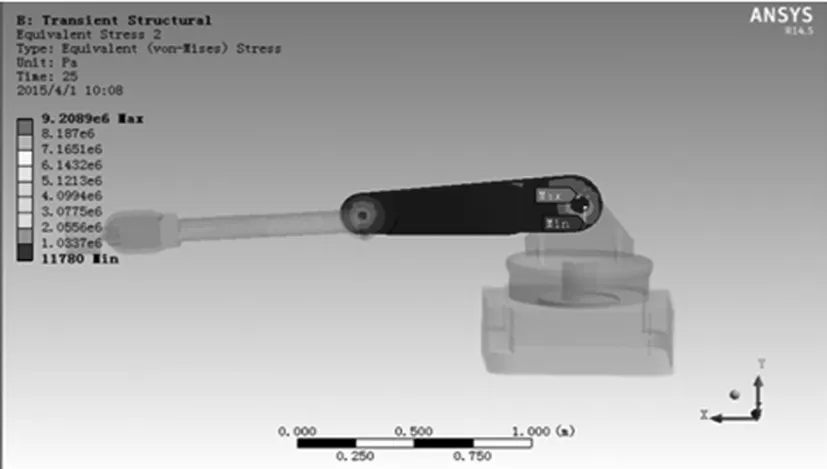
图8 大臂应力分布
4 结论
该方法采用ADAMS和Workbench对六自由度机器人进行瞬态动力学分析,得到了各机械臂在真实运动状态下的受力变化情况,避免了传统通过计算、加载受力和施加约束关系再进行有限元分析的繁琐。分析中充分考虑了机械结构本体、惯性力和各零件间的配合关系等因素,同时避免了传统瞬态动力学分析中因计算出错而导致的分析错误。这种方法能快速、准确的实现装配体在复杂运动条件下的有限元分析,适用于对受力分析困难和运动规律复杂的装配体进行瞬态动力学分析。
[1] 任爱华,龚青山,常治斌,等.弧面分度凸轮机构瞬态动力学分析[J]. 机械设计与制造,2012(5):71-74,102.
[2] 马少龙,刘冬花,马国红,等. 一种快速获取机器人运动轨迹的方法研究[J].组合机床与自动化加工技术,2014(10):17-18,22.
[3] 姜振廷,郑忠才,董旭.基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2013,36(1):109-110.
[4] 袁安富,陈成. 基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计[J]. 机械传动,2013,37(2):53-57.
[5] 马睿,胡晓兵,万晓东.基于ANSYS的小型机器人小臂的有限元静态分析[J].机械设计与制造,2012(9):4-6.
[6] 陈祝权,梁晓合,林粤科,等. 六自由度串联机器人结构设计及有限元分析优化[J]. 机床与液压,2013,41(23):97-101.
[7] 刘思思,张春雷. 基于 ANSYS 的工业机器人大臂的有限元静态分析[J]. 中国西部科技,2013,12(9):45-46,58.
[8] 杜永忠,平雪良,许卫斌. 基于ANSYS的工业机器人腰关节结构分析[J].工具技术,2012,46(4):56-60.
[9] 浦广益. ANSYS Workbench 12基础教程与实例详解[M].北京:中国水利水电出版社,2010.
[10] 李兵,何正嘉,陈雪峰. ANSYS Workbench设计、仿真与优化[M]. 北京:清华大学出版社,2008.
(编辑李秀敏)
Application Study of Workbench in Industrial Robots Transient Dynamic Analysis
LI Hui, HUANG Wen-quan,LI Kai-shi
(College of Mechanical Engineering, Sichuan University of Science & Engineering, Zigong Sichuan 643000, China)
In order to achieve the goal of finite element analysis for complexmovement, using the six-DOF robot as example. Import 3-D model of SolidWorks and ADAMS kinematic analysis data into Workbench, it is successful to make the joints move as the goal set and finish the transient dynamics analysis. When compared this new method with the traditional calculate method, this new one’s method is easier and the results are more reliable, because the mechanical structure ,inertial force and so on are considered in this method, so the simulation environment is more true.
rapid finite element analysis; industry robot;transient dynamic
1001-2265(2015)11-0030-03DOI:10.13462/j.cnki.mmtamt.2015.11.009
2015-02-03;
2015-03-10
过程装备与控制工程四川省高校重点实验室基金项目(GK201003)
李辉(1988—),男,四川绵阳人,四川理工学院硕士研究生,研究方向为机电一体化,(E-mail)1033502414@qq.com;通讯作者:黄文权(1970—),男,四川自贡人,四川理工学院副教授,研究方向为产品数字化设计,面向成本设计和制造业信息化,(E-mail)hwqsc@163.com。
TH166;TG65
A
